Merhaba arkadaşlar. Bugün sizlerle Arduino UNO ile servo motor kontrol uygulaması yapacağız.
Gerekli malzemeler:
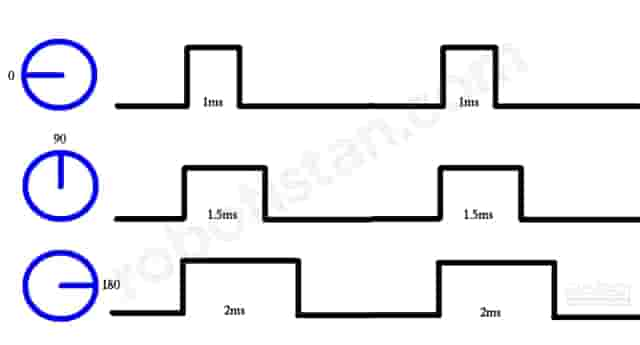
Servo motorlar, RC (radio controlled, uzaktan kumandalı) araba, helikopter ve uçak gibi araçlarda kullanılır. Bu motorlar, DC motorlardan farklı olmak üzere istediğimiz pozisyonda sabit kalacak şekilde tasarlanmıştır. Çoğunlukla 0-180 derece arası açılarda çalışırlar. RC arabamızın direksiyonunda, helikopterlerin pervanelerine açı vermede ve uçakların kontrol yüzeylerini hareket ettirmede kullanılırlar. PWM sinyal ile çalışırlar.
İlk uygulama örneklerimizde PWM’i analog voltaj çıkışı elde etmek için kullanmıştık. Fakat servo motorlarda PWM biraz daha farklı şekilde çalışmakta. Hatırlayacak olursak, Arduino’da analogWrite() komutu ile aldığımız PWM sinyalinin sadece 5V seviyesinde kaldığı süreyi (duty cycle) değiştirerek farklı analog sinyaller elde etmiştik. Servo motorlarda ise yine benzer şekilde 20 ms’lik sinyalin açık kaldığı periyodu 1 ms ile 2 ms arasında değiştirerek, servomuzu 0 dereceden 180 derece arasında istediğimiz konuma ayarlayabiliriz.
Bağlantılarımızı şekildeki gibi yapıyoruz:
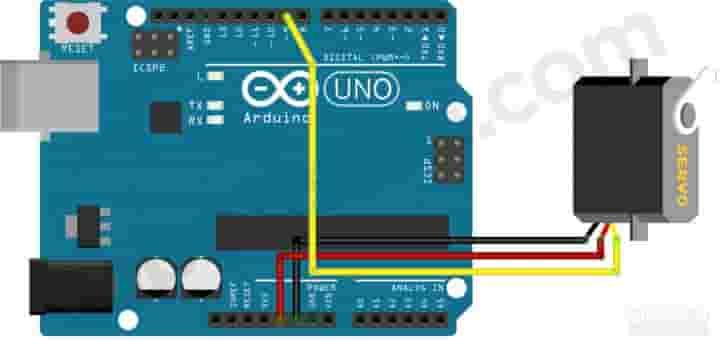
Uygun koda Arduino programından
Dosya > Örnekler > Servo > Sweep
adımlarını takip ederek ulaşabilirsiniz. Bu kod, servomuzu önce 0 dereceden 180 dereceye adım adım ilerletecek; 180 dereceye ulaşınca da tekrardan 0 dereceye adım adım geri döndürecektir.
Farklı bir uygulama olarak servomuzun pozisyonunu Arduino’muza bağlayacağımız bir potansiyometre ile de kontrol etmemiz mümkün:
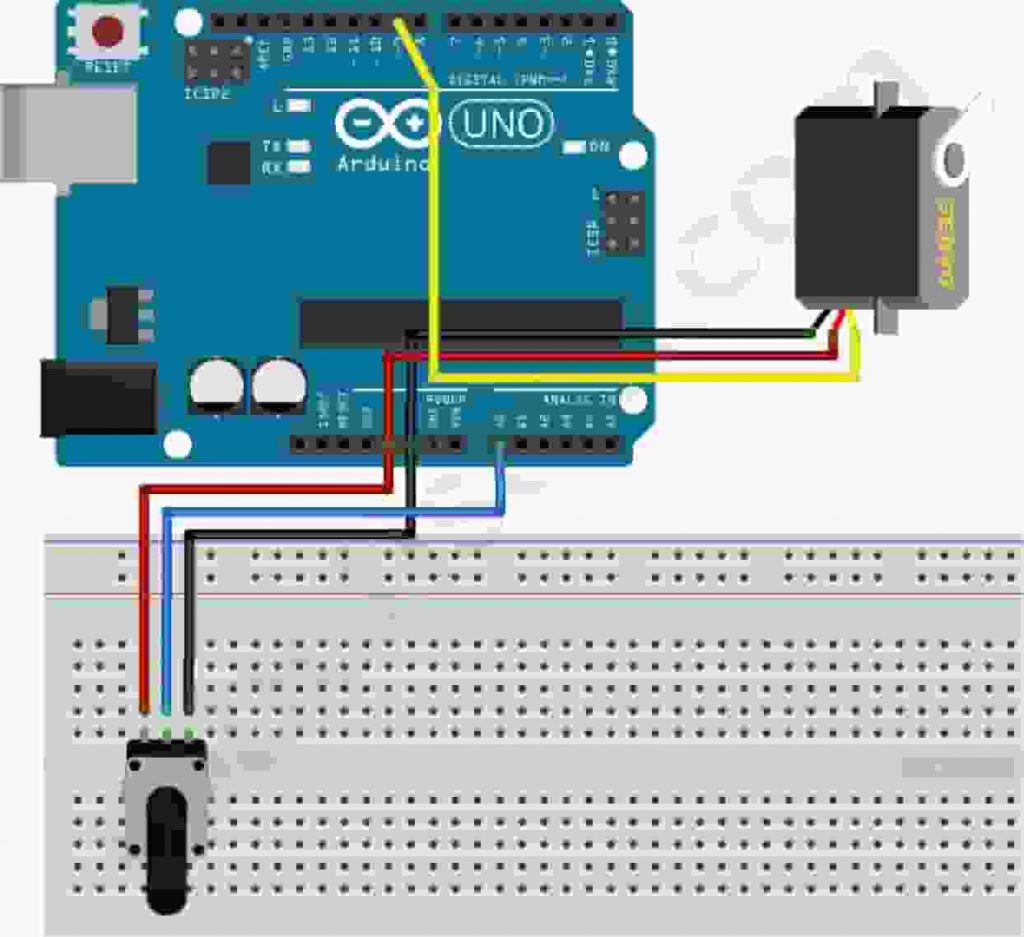
Bu devreye uygun koda da
Dosya > Örnekler > Servo > Knob
adımlarını takip ederek ulaşabilirsiniz.







bu güzel çalışma için teşekkürler
bir sorum olacak
servo motorun istenen açıya giderkenki hızını nasıl ayarlayabiliriz?
(rampalanarak çalışmasını ve durmasını istiyorum)
Servonun istenen pozisyona giderkenki hızını koddaki delay() komutlarını değiştirerek ayarlayabilirsiniz fakat, maksimum konumlama hızı, servo motorun içinde kullanılan motor ile alakalı olduğundan buna pek müdahale şansımız bulunmamaktadır. Projenizde kullanacağınız servo motoru tercih ederken size uygun hıza sahip olanı sn/60 derece şeklinde verilen servo özelliklerine bakarak tercih edebilirsiniz. Ayrıca dijital servolar analog servolara göre daha hızlı ve kararlı çalışmaktadırlar.
Abi öncelikle merhaba.Ben arduino ya yeni başlayanlardanım yaşım 13 aklımda robotik kol projesi var.Bunun için 4 tane potansiyometre ile 4 tane servo motoru kontrol ederek yapmayı planlıyorum bu ikisini aynı anda kontrol edebilir miyim?
Merhabalar. Bahsettiğiniz şekilde 4 adet potansiyometre ile 4 adet servoyu kontrol etmeniz mümkündür. Benzer bir proje olarak bu yazıdan faydalanabilirsiniz: 3 Boyutlu Akıllı Arduino Robot Kol Yapımı
kardeşim yaptınmı robot kolu
delayi değiştir
onu ayarlayaamazsın knk
merhabalar. ben arduino ile 6 adet mg996r servo kontrol etmek istiyorum.motorlara breadboard üzerinde 5v 1a adaptör ile dışarıdan besledim.arduino’nun gnd ile board’a 1 bağlantı yaptım.ancak yeterli gücü aldığımı düşünmüyorum acaba yanlış mı kullanıyorum güç kaynağımı?ölçtüğümde 1motor 0.1a-0.3a gibi bir aralıkta çalışıyor ama datasheet’ine baktığımda 6v 0.8a çalışma değerleri görünüyor.lütfen bilginiz varsa yardımcı olunuz teşekkürler iyi günler dilerim.
0.8 amper 6 volt altında ve zorlandığı andaki akımdır.gücü arttırmak istiyoprsan voltajı 5 den 6 ya çıkarmalısın.
Merhaba,
Bu uygulama ile motoru önceden belirlediğimiz 50-60 noktaya hafızalandırabilirmiyiz.
Yani istediğimiz 50-60 nokta için memory uygulaması yapılabilirmi.
Teşekkürler
Merhabalar. İstediğiniz konumların derece olarak karşılığını bildiğinizi varsayarsak, servo.write(derece) komutunu kullanarak sırayla istediğiniz konumlara servoyu hareket ettirebilirsiniz.
Merhaba
Ben basınç sensörü flex sensörü ve servo motor kullanarak robot kol yapmak istiyorum. Flex sensör ile servoyu hareket ettireceğim fakat robot kolun ucundaki basınç sensörüne belli bir kuvvet uygulandığında servo duracak. Bu uygulamayı nasıl yapabilirim. Yardımcı olursanız sevinirim
Basit bir if yazarak yapabilirsiniz.
Merhabalar; elimde tam tur atabilen bir servo motor var, ve mesafe sensörünün ölçtüğü uzaklık belli bir değerin altına indiği zaman durmasını istiyorum. Bunu nasıl sağlayabilirim?
if (sensorDegeri <= istenilenDeger) { myservo.write(0); }
merhaba.ben hc -sr501 hareket sensörü ile mg 90s servo motor kontrolünü zaman ekleyerek nasıl yapabilirim? mesela sensör algıladığında servo motor sıfır konumundan 180 dereceye gidecek ve algılama devam ettiği sürece bekleyecek algılama bitince 3 sn bekleyip servoyu 180 dereceden sıfır konumuna alacak.kodun tamamını yazarsanız sevinirim.teşekkür ederim.
int sensor=analog read (sensor)
if sensor==1024
(servo.write(180))
else
(delay(3000)
servo.write(0))
return
Merhabalar;
4 ad Mg996r ile yaptığım bir projede komut listesine ihtiyacım var.Butona basıldığında servolar 90*derece dönecek 1 sn bekleyip tekrar eski pozisyonuna dönmesini istiyorum.Bu işlemi butona bastığımızda 1 defa yapacak.Komut satırı hk.yardımcı olabilirseniz sevinirim.İyi çalışmalar,
Engelden kaçan robot yapmaktayım. Bu robotun engeli gördüğünde durup sonra dönmesini istiyorum. Dönmesinde sıkıntı yok fakat durduramıyorum. Motoru kontrol eden bağlantıların hepsine yazılım kısmında HIGH verilince motor duruyor diye biliyorum. Fakat durmuyor. Yardımcı olurmusunuz?
Motora fren yaptırmak için tüm bağlantıları LOW’a çekmeniz gereklidir.
2 adet fırçasız DC motoru joyistick ile kontrol edebileceğimiz çalışmanız varmı acaba
Fırçasız DC motorlar ESC isimli sürücüler ile kullanıldığından tıpkı servo gibi kullanılabilir. Joystick kontrollü servo uygulamalarına bakabilirsiniz, size bir fikir verecektir.
Iyi günler elimde iki adet Free tech fs90r pl 2820 servo motor var ben bu motorlarla android uzerinden almis oldugu sayisal degerler ile labirenti cozebilmesini istiyorum elimde birde hc 06 bluetooth var android bluetoothu görüyor ve baglaniyor ama mesaj alis verisi yapmiyor ve motorlar kodlari girmeme ragmen tam yani 360 derece dönüyor motorlarin bu dönüşünü telefondan kontrol edebilmek icin nasil bir kod girmem gerekiyor yardimci olursaniz cokkkkk sevinirim iyi günler iyi çalışmalar 🙂
Analog olarak çalıştırdığım yağmur sensörü var ben yağmur miktarına göre servonun çalışmasını istiyorum sağanak yağmurda çalıştı ama normal yağmur yağarken çalıştoramadım iki kodu nasıl ayarlamalıyım
Merhabalar, Ben de yağmur sensörünün suyu algılaması durumunda servo motorun belli bir açı değeriyle çalışmasını istiyorum.Kodu nasıl yazabilirim.Şimdiden teşekkür ederim.
Buradaki sensörü kullanarak yağmur algılaması yaptırabilirsiniz. Sensör analog çıkış verdiğinden yazacağınız kod
if(analogRead(sensor_pini))gibi bir if yapısı ile kolaylıkla kod kısmı yazılabilir.Merhaba bir adet dc motor bir adet 180 derece servo motoru nrf24l01 smd ile birlikte kullanmak istiyorum diğer tarafta yine bir uno r3 üzerinde nrf24l01 ve joystick shield olacak bu şekilde rc araç ve kumandasını yapmam için uygun bir motor shield ya da çözüm bulamadım l293d motor shield alamayı düşündüm ama o zamanda nrf için gereken pinleri motor shield işgal ediyor lütfen yardımcı olur musunuz TSK…
Merhabalar. Konuyu ve yourmları okudum fakat benim yapmak istediğim şey başka. Elimde AC bir servo motor ve o motora ait sürücüsü var. Ben bu servoyu arduino ile kontrol etmek istiyorum fakat forumlarda veya başka bir yerde bununla ilgili bir kaynak bulamadım. Bilginiz varsa eğer yardımcı olabilirseniz çok sevinirim.Teşekkürler
Merhabalar. Bahsetmiş olduğunu endüstriyel tipte servo drive’lar marka/modellerine göre PROFINET, PROFIBUS, CCLink gibi endüstriyel haberleşme protokolleri ile diğer otomasyon ekipmanları ile bağlantı kurabileceği gibi, PLC ile doğrudan kullanımı için Arduino üzerindekine benzer dijital giriş/çıkışlara da sahip olabilirler. Eğer bu tipte girişler sürücünüzde mevcut ise, Arduino veya benzer bir mikrokontrolcünün çıkışını PLC ile uyumlu 24V seviyesine getirebilen bir devre kartı ile (örnek) kullanabilirsiniz.
Merhabalar bende hareket sensörü var ve servo motor bunları sedyeye nasıl baglarım ve nasıl kodlarım
Güzel yazı için sonsuz teşekkürler hocam elinize emeğinize sağlık
Merhaba bu işlerde çok yeniyim ik adet servoyu aynı anda farklı hareketler ile nasıl çalıştırabilirim şu anda ikisinede aynı hareketi yaptırabiliyorum
Bilg için tesekkurler
Arduino’ya aynı ikinci devredeki gibi bir potansiyometre daha bağlayın. Diğer potansiyometrenin orta pinini A1 pinine bağlayın. Aynı şekilde ikinci servoyu da, sinyal pini 10 numaralı dijital pine gelecek şekilde bağlayın. Aşağıdaki kodu kullanabilirsiniz:
#include "Servo.h"
Servo servo1;
Servo servo2;
int s1_val;
int s2_val;
void setup() {
servo1.attach(9);
servo1.attach(10);
}
void loop() {
s1_val = analogRead(A0);
s1_val = map(s1_val, 0, 1023, 0, 180);
s2_val = analogRead(A1);
s2_val = map(s2_val, 0, 1023, 0, 180);
servo1.write(s1_val);
servo2.write(s2_val);
delay(15);
}
servo1.attach(10);
burası
servo2.attach(10);
olmalı.
Doğru 🙂 Gözümden kaçmış.
Merhaba.Otopark projesi için ultrasonik mesafe sensörüyle servo motor kontrol ediyorum.Bütün park yerlerinin dolu olduğu durumda giriş kapısı için kullandığım servo motorun konumunun değişmemesini istiyorum acaba yardımcı olabilir misiniz ? Teşekkürler.
merhaba ben bi servo motoru uzaktan kumanda ile ileri geri hareket ettirmek istiyorum bunun icin gerekli malzemeler hakkinda bilgi verirmisiniz
RC araçlar için kullanılan uzaktan kumandalar doğrudan servo motorları kontrol edebilecek şekilde tasarlanmıştır. Kumandanın alıcısının uygun kanalına servo motoru takmanız ve 5V (çoğu servo motor 5V ile çalışır) ile beslemeniz yeterlidir.
servoya guc gıdıo ama bır turlu donme ıslmeını gerceklestımıyo onu nasıl cozerız
servo motor lcd ekran ve lm35 ısı sensörü kullanıyorum sorunum lm35 sensör veriyi servo motor durduktan sonra veri alabiliyorum lm35 sensör verisini 1 sn bir nasıl alabilirim
#include
#include
#include
// initialize the library with the numbers of the interface pins
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
Servo myservo;
float T;
int motor = 0;
int i;
void setup() {
// set up the LCD’s number of columns and rows:
Serial.begin(9600);
lcd.begin(16, 2);
lcd.setCursor(0,0);
// Print a message to the LCD.
lcd.print(“Temperature”);
myservo.attach(9);
}
void loop() {
T = 0.48828125 * analogRead(A0);
// set the cursor to column 0, line 1
// (note: line 1 is the second row, since counting begins with 0):
lcd.setCursor(0, 1);
// print the number of seconds since reset:
lcd.print( T,1);
lcd.print(” oC”);
delay(1000);
Serial.print(“TEMPRATURE = “);
Serial.print(T);
Serial.print(” oC”);
Serial.println();
delay(1000);
for (motor = 90; motor 90; motor-= 1) { // goes from 180 degrees to 0 degrees
myservo.write(motor); // tell servo to go to position in variable ‘pos’
delay(30); // waits 15ms for the servo to reach the position
if( motor==91 ){
myservo.write(motor); // tell servo to go to position in variable ‘pos’
delay(3000);
}
else {
myservo.write(motor);
delay(30);
}
}
for(motor=90; motor>45; motor-=1){
myservo.write(motor);
delay(30);
if(motor==46){
myservo.write(motor);
delay (3000);
}
else{
myservo.write(motor);
delay(30);
}
}
}
Bu işlem için Arduino’da delay fonksiyonunu kaldırmanız gerekir. delay fonksiyonu kullanıldığında, mikrokontrolcü hiçbir işlem yapmadan sadece beklediğinden dolayı bu şekilde bir sorun yaşamaktasınız. Delay’siz Arduino kullanımı için https://learn.adafruit.com/multi-tasking-the-arduino-part-1/using-millis-for-timing ve https://www.arduino.cc/en/Tutorial/BlinkWithoutDelay adreslerinden yararlanabilirsiniz.
tşekür ederim yardım ettiğniz için.
Merhaba ben yağmur sensöründen okuduğum degerle servo motoru kontrol etmek istiyorum ikisinin çalısmasını bir türlü birleştiremedim yardımcı olabilir misiniz?
Otomobillerdeki yağmur sensörü ile çalışan silecek uygulamasına benzer bir çalışma mı yapmayı planlıyorsunuz?
Merhaba ben böyle bir çalışma yapmayı planlıyorum ve yeniyim daha nasıl yapabilirim?
Merhabalar yeni yeni öğreniyorum.servo motoru bilgisayardan girdiğim tur sayısı kadar dönmesini istiyorum bunu nasıl yapabilirim hocam
Standart servo motorlar 0-180 derece arasında çalışırlar. Öncelikle bu işlem için sürekli dönebilen tipte bir servo motora ihtiyacınız olduğunu hatırlatmak isterim. Sürekli dönebilen servo motorlarda ise motorun konumunu algılayamadığımız için bu işlemi ancak süreye bağlı olarak değiştirebiliriz. Motorun bir turu ne kadar sürede aldığını ölçebilir, bilgisayardan gireceğiniz tur sayısını bu değer ile çarparak motoru çalıştırdıktan sonra Arduino’nun bu süre kadar beklemesini sağlayabilirsiniz.
merhaba mg90s 180 derece bir servom var fakat konumlandırma yapmaya uğraşırken nasıl olduysa 360 derece dönmeye başladı. içindeki pot bozulmuş olabilir mi düzeltebilir veya bu şekilde konumlandırma yapabilir miyim öneriniz nedir
İnsansı Robot yapmayı düşünüyorum 32 tane servo motor kullanmak istiyorum kart olarakta Arduino mega bu mümkün mü acaba yardımınıza ihtiyacım var
benim bir problemim var bir türlü çözemedim arduinoda servo ile lm 35 aynı anda çalıştırmak istiyorum. Yapmak istediğim servo motor 1 er saniye ile 0 45 90 180 beklemesi .lm35 ısı sensörü 1 sn de bir ölçüm yapması . sorunum şu servo motor 1er sn ile 0 45 90 180 derecede bekliyor ama lm 35 ısı sensörü servo motorum her sıfıra geldiğinden 1 sn sonra ölçüm yapıyor. yani ( delayleri toplayarak 5sn de bir ölçüm yapıyor). bu konuda yardımcı olurmusunuz.
Bu işlem için Arduino’da delay fonksiyonu kullanmadan bekleme komutu vermeyi öğrenmeniz gereklidir. Örnek kullanım için buradaki yazıyı inceleyebilirsiniz: https://learn.adafruit.com/multi-tasking-the-arduino-part-1?view=all
sa arkadaşlar servo motoru 45 derece çevirdikten sonra o açıda 1-2 saat bekletmem için hangi kodu yazmam gerek.bu kodu kullanıyorum ama beklemiyo.
int sicaklikpin = A1; //Analog değer girişi
float sicaklik; //Analog değeri dönüştüreceğimiz sıcaklık
float analoggerilim; //Ölçeceğimiz analog değer
#include
#include
Servo myservo;
LiquidCrystal lcd(13, 12, 11, 7, 8, 9, 10);
// RS,RW, EN, DB4,DB5,DB6,DB7 LCD BAGLANTISI
#include // dht11 kütüphanesini ekliyoruz.
#define DHT11PIN A2 // DHT11PIN olarak Dijital 2’yi belirliyoruz.
dht11 DHT11;
int pos = 45;
int role=4;
int sayac=0;
void setup() {
// set up the LCD’s number of columns and rows:
myservo.attach(9);
lcd.begin(16, 2);
lcd.setCursor(0, 0);
lcd.print(“SICAKLIK”);
lcd.setCursor(0, 1);
lcd.print(“NEM”);
pinMode(role,OUTPUT);
}
void loop()
{
analoggerilim= analogRead(sicaklikpin); //A0’den değeri ölç
analoggerilim=(analoggerilim/1023)*5000; //değeri mV’a dönüştr
sicaklik=analoggerilim /10,0; //mV’u sicakliğa dönüştür
for(pos = 0; pos =39)
{
digitalWrite(role,LOW);
}
else if(sicaklik=0; pos-=1) // Servo 1’den 0 pozisyonuna 180 derece dönecek.
{
myservo.write(pos); // Belirlenen pozisyona gitmesi isteniyor.
delay(50); // Pozisyona 5 ms de ulaşıyor
}
}
Döngülerinizde hata var. Ayrıca servoyu berlirli bir konuma adım adım getirmek zorunda değilsiniz, myservo.write(45) gibi bir komut ile doğrudan 45 dereceye gitmesini sağlayabilirsiniz.
Iyi günler elimde iki adet Free tech fs90r pl 2820 servo motor var ben bu motorlarla android uzerinden almis oldugu sayisal degerler ile labirenti cozebilmesini istiyorum elimde birde hc 06 bluetooth var android bluetoothu görüyor ve baglaniyor ama mesaj alis verisi yapmiyor ve motorlar kodlari girmeme ragmen tam yani 360 derece dönüyor motorlarin bu dönüşünü telefondan kontrol edebilmek icin nasil bir kod girmem gerekiyor yardimci olursaniz cokkkkk sevinirim iyi günler iyi çalışmalar 🙂
sa arkadaşlar servo motoru 45 derece çevirdikten sonra o açıda 1-2 saat bekletmem için hangi kodu yazmam gerek.bu kodu kullanıyorum ama beklemiyo.
int sicaklikpin = A1; //Analog değer girişi
float sicaklik; //Analog değeri dönüştüreceğimiz sıcaklık
float analoggerilim; //Ölçeceğimiz analog değer
#include
#include
Servo myservo;
LiquidCrystal lcd(13, 12, 11, 7, 8, 9, 10);
// RS,RW, EN, DB4,DB5,DB6,DB7 LCD BAGLANTISI
#include // dht11 kütüphanesini ekliyoruz.
#define DHT11PIN A2 // DHT11PIN olarak Dijital 2’yi belirliyoruz.
dht11 DHT11;
int pos = 45;
int role=4;
int sayac=0;
void setup() {
// set up the LCD’s number of columns and rows:
myservo.attach(9);
lcd.begin(16, 2);
lcd.setCursor(0, 0);
lcd.print(“SICAKLIK”);
lcd.setCursor(0, 1);
lcd.print(“NEM”);
pinMode(role,OUTPUT);
}
void loop()
{
analoggerilim= analogRead(sicaklikpin); //A0’den değeri ölç
analoggerilim=(analoggerilim/1023)*5000; //değeri mV’a dönüştr
sicaklik=analoggerilim /10,0; //mV’u sicakliğa dönüştür
for(pos = 0; pos =39)
{
digitalWrite(role,LOW);
}
else if(sicaklik=0; pos-=1) // Servo 1’den 0 pozisyonuna 180 derece dönecek.
{
myservo.write(pos); // Belirlenen pozisyona gitmesi isteniyor.
delay(50); // Pozisyona 5 ms de ulaşıyor
}
}
Yanıtla
İyi günler. 2 adet servo mg995 i arduino uno ile çalıştırıyorum yalnız biraz çalışıp reset atıyor kendine. Güç sorunu mu var acaba. Yardımcı olur musunuz.
Eğer gücü Arduino üzerindeki 5V pininden sağlıyorsanız yetmeyecektir. Servoları beslemek için harici bir 5V güç kaynağı kullanın ve bu güç kaynağının eksi ucunu Arduino’nun GND hattıyla birleştirin.
Merhaba alev söndüren robot yapıyorum sensör alevi algılıyor su püskürtmek için servo motoru alevin olduğu yöne kilitliyemiyorum yardımcı olursanız sevinirim
Hangi alev sensörünü kullanıyorsunuz? Eğer buradaki gibi bir sensör kullanıyorsanız yalnızca alevin varlığını algılamada kullanabilirsiniz. Yönünü algılamak için bu sensörden birden çok sayıda kullanmanız gerekecektir.
ARDUINO UNO İLE BİR MÜHİMMAT MAGAZİNİ YAPMAK İSTİYORUM. BİR MONİTÖRDEN KONTROLÜNÜN SAĞLANIP İSTENİLEN MÜHİMMATIN MÜHİMMAT YUVASINA DENK GELECEK ŞEKİLDE SERVO MOTORUN DÖNEREK ÇALIŞMASINI İSTİYORUM. NASIL YAPABİLİRİM?
hocam ben servo motoru joyistik ile kontorl edicem ama hiç yaazılım bilgim yok ve hazır kodları kullanarak öğrenmeye çalışıyotum ve herseferinde kol hareket ettiği yönden geri geliyor bunu nasıl çözerim kodunu nasıl yazmam gerek ? yadım ederseniz sevinirim 😉
Merhaba. Ben de bir proje yapıyorum. Benim de bir sorum var. Üç adet servo motor kullanmak istiyorum projemde. Bu servo motorların ardunio ile birlikte gerçek zamana göre çalışmasını istiyorum. Mesala saat 3 oldugunda bu motorlardan birincisinin bir tur dönmesini saat 4 olduğunca ikincisinin bir tur dönmesini ve saat 5 olduğunda üçüncü motorun tam bir tur dönmesini istiyorum. Bunun için 360 derece dönen servo motor mu kullanmalıyım? Eğer bu servo motoru kullanırsam zamana göre sadece bir tur nasıl attırabilirim?
Bahsettiğiniz projede 360 derece dönebilen servo motor yerine enkoderli DC motor veya step motor kullanmanız hassas derece kontrolü için daha uygun bir seçim olacaktır.
Cevap yazdığınızdan beri araştırıyorum ama karar veremedim hangi step motoru alacağıma. Step motorun üzerine çok fazla yük yüklemeyeceğim. Daire şeklinde kesilmiş bir kartonu ve üzerinde bulunan az miktarda ufak ilaçlarla birlikte döndürmek istiyorum. Sizde hangi step motoru satın almalıyım?
Merhaba; arduıno uno ve servo motor aldım bu konuda pek bilgim yok servoyu arduınoya bağladım youtube deki videolardan bakarak ve sıra komut vermeye geldi komutu şu sekilde verdim
libarry-servo
ınclude:servoh
attach 9
write 180
yapıyorum hata veriyor yardımcı olabilirmisiniz
Merhaba ben bu kodu kullanarak bir proje yaptim ve bunu pille calistirmam gerekiyor. Prominiyi ve servoyu 4 er adet ayri pille besliyorum fakat yinede piller cok cabuk bitiyor. Bu koda kesme ve uyku modu uygulayarak pille uzun sure nasil calistirabilirim yardim ederseniz sevinirim. Teşekkürler. Ayrica guc tasarrufu olsun diye atmegayi ciplakta kullandim ama yinede pil omrunu tatmin edici duzeyde artiramadim. Teşekkürler
int sensor=analog read (sensor)
if sensor==1024
(servo.write(180))
else
(delay(3000)
servo.write(0))
return
Selamlar, ben VHDL ile FPGA kullarank servo motoru kontrol etmeye çalışıyorum o yüzden kod üzerinden değilde genel mantık üzerinde sorum olacak: 1 ms duty gönderirsem sola 2 ms duty gönderirsem sağa gideceğini biliyorum ama servo motor hangi hızla döneceğini nasıl anlıyor? Acaba PWM aralığını artırmam servoyu yavaşlatır mı?
Servo motorların hızını malesef bu şekilde kontrol edemezsiniz. Sizin de belirttiğiniz gibi sadece servo kolunun konumunu vereceğiniz PWM dalganın duty cycle’ını değiştirerek kontrol edebilirsiniz. Ne kadar hızlı şekilde o konuma gideceği ise tamamen servo içerisinde kullanılan motor ile alakalıdır. Bu değer servonun özellikleri arasında “Hızı: 0.16sn/60°” gibi bir ifade ile belirtilir.
bu aletin kodları nerde bilen varmı
Yazıda da belirttiğim gibi Arduino IDE’yi açtıktan sonra Dosya > Örnekler > Servo > Knob menü sırasını takip ederek koda ulaşabilirsiniz.
ben ardunoyu araba kilometre sayacina baglayarak pc de araba oyunu oynarken hizimi km sayacında gormek istiyorum nasil yaparim
Merhabalar, doğru anladıysam şuna benzer bir proje yapmak istiyorsunuz: https://www.youtube.com/watch?v=QNlG-Zp_zwM
Bunun için birden fazla seçeneğiniz var. Örnek olarak videoda verilen şekilde bir araca ait gösterge panelini CAN BUS haberleşme kullanarak kontrol edebilmeniz mümkün. Fakat maliyeti ve karmaşıklığından dolayı daha basit bir yöntem de tercih edebilirsiniz. Buna örnek olarak ise bir servo motor kullanıp, oyundan alacağınız hız bilgisine göre servonun açısının değiştiği bir hız saati yapabilmeniz mümkün. Burada karşılaşacağınız en büyük zorluk, bilgisayarınızda çalışmakta olan oyundan aracın hız bilgisini Arduino’ya aktarmak olacaktır. Arduino kısmındaki servo kontrolünü ise bu dersimizdeki bilgileri kullanarak gerçekleştirebilirsiniz.
Merhaba ben arduino ile engelin etrafindan gecen araba yapmak istiyorum . Bunu nasil saglayabilirim . Hangi malzemeler gereklidir ?
merhabalar.
ben potansiyometre ile servo motoru hareket ettirip en son yerde kalmasını istiyorum. nasıl yapabilirim?
sorumu biraz detaylandırayım. potansiyo metre ile servo motoru hareket ettirip, potansiyo metreden gelen sinyal kesildiğinde motorun en son bulunduğu konumda kalmasını, tekrar potansiyo metre ile ileri yada gere hareket ettirdiğimde servo motorun en son kaldığı yerden hareketine devam etmesini istiyorum. yukarıdaki kodları kullandığımda potansiyometreden sinyal kesildiğinde motor sıfır noktasına dönüyor. bilmem anlatabildim mi? teşekkürler.
merhaba kodlara nerden ulaşabilirim dosyadan demişsiniz ama öyle bişey bulamadım sitenizde
Merhabalar, öncelikle Arduino Dersleri serimizin ilk yazısını okumanızı tavsiye ederiz. Arduino kartınızı programlamak için gerekli olacak Arduino IDE yazılımını ve sürücülerin kurulumunu bu yazımızı takip ederek gerçekleştirebilirsiniz.
Arduino ve elektronik konuları ile ilgili tecrübe kazanıyorum. İlk adımlar hep zor olur, bu yüzden basit konularda takılıyorum. Yardımlarınızı rica eder teşekkür ederim.
Yeni aldığım Powerhd 1160A’ ı harici enerji kaynağı ile kullanmaya çalışırken hep problem ile karşılaştım. Kimisinde sanırım voltaj yetersiz geldi, fevri hızlarda hareket etti motor. Yani hızlı hareket etti, sonra durdu. Kimisinde sola döndü, sonra sağa bir müddet dönmedi. Kimisinde olduğu yerde sesler çıkardı ama hareket olmadı. Bunların hepsinin voltaj ve akımdan kaynaklı olduğunu düşündüm. Öncelikle bu düşüncem doğru mu sormak isterim.
Sonrasında 6V bir voltaj düzenleyici kart aldım ve bunu 12V 2A olan bir adaptör ile besledim. Yani giriş 12V çıkış 6V olarak ayarladım. Artık oldu herhalde derken baktım Servo motor’ da hiç bir tepki ve en ufak bir ses yok. Acaba Servo’ yu mu bozdum diye içini açtım. Multimetre ile girişinde ki voltajı 6V olarak ölçtüm. Servo’ nun içinde bir adet DC motor vardı. Onunda bacaklarında ki voltaja bakayım dedim ve 0V ölçtüm. O sırada yanlış bir yere mi dokundum bilmiyorum, hafif bir duman çıktı lambadan cin çıkar misali. Sonuç olarak nerede hata yaptım sormak isterim. Acaba adaptör çıkışında 2A yazıyordu, bu akım servoya ulaştı ve servoyu mu bozdu?
Şimdiden teşekkürler.
Adaptörünüzün çıkışının 2A olması, en fazla 2A verebileceğini gösterir. Akımın herhangi bir yere sizin dediğiniz gibi ulaşması ancak kısa devre yaptığınızda mümkün olur. Sizin servonuzun bozulma sebebi, büyük ihtimalle içini açtığınız esnada yapmış olduğunuz bir kısa devreden kaynaklı olmuştur.
Merhaba.
Yeni bir Powerhd 1160A alarak çalışmamı tekrarladım. Maalesef aynı şekilde düzensiz hareketler var. Problemimi şu videoda daha iyi anlatabilmişimdir umarım. Servo anormal hareketler yapıyor. Video’ da harici kaynaktan voltaj (5v), akım ölçer, kod ve servonun garip halleri yer alıyor. Yardımcı olursanız sevinirim.
https://www.youtube.com/watch?v=EokUWbBfXxY
Yaşadığınız problem oldukça ilginç görünüyor. Farklı bir servo kütüphanesi (örn: https://github.com/netlabtoolkit/VarSpeedServo) denemeyi deneyebilir ve güç kaynağınızı değiştirmeyi deneyebilirsiniz.
Breadboard üzerinde + ve -‘ yi kenarlarda ki boylu boyunca almayıp A2 filan gibi harfli yerlerden alınca düzeldi. Belki sebep başka bir şeydi velhasıl şu an çalışıyor.
calışmıyor
Aldığınız hatayı veya karşılaştığınız sorunu paylaşırsanız daha kolay yardımcı olabilirim.
Merhaba, arduino kodlama programının içerisindeki servo> swep örneğini küçük servo ile denedim sorun çıkmadı. Ancak mg945 360 derece dönebilen servoda denediğimde servo sürekli dönüyor kodları algılamıyor sanki ne yapmalıyım. Güçle ilgili olma ihtimali var mı?
360 derece dönebilen servo motorlar adlarından da anlaşılacağı üzere sürekli dönmeleri için tasarlanmıştır. DC motor kullanmak yerine sürücüye ihtiyaç duymadan ve basit bir şekilde mikrokontrolcünün tek bir PWM çıkışını kullanmaları için tasarlanmıştır. Bu sebepten dolayı açı kontrol mekanizması barındırmazlar.
aynı sorunu bende yaşıyorum. açısal olarak değil de yön kontrolü sağlayamazmıyız. yatay hareket eden bahçe kapısında ileri ve geri kontrolü nasıl yaparız. acil yardım lütfen
Servo motor yerine DC motor tercih edebilirsiniz. Örnek ders: Arduino Dersleri 14: DC Motor Hız ve Yön Kontrolü
9 adet asansör için 9 adet 360 derece servo ve pca9685 sürücü aldım. Asansörler farklı zaman ve hızda bir inip bir çıkacaklar. Bunun için uygun bir arduino kod hala bulamadım. O zaman ben yanlış motorlar mı almış bulunuyorum? 🙁
bir arduino uno ya en fazla kaç servo bağlanır ve nasıl bağlanır pin olarak kısaca bi açıklarmısınız mümkünse
Bu adreste de belirtildiği üzere, standart servo kütüphanesini kullanarak 12 adet servo sürebilmeniz mümkündür.
merhabalar ben servoyu istediğim açıya geldiğinde bir süre bekletmek ve daha sonra bir diğer açıya gidip orada da bekletmek istiyorum bu konuda yardımcı olabilirseniz sevinirim
servo.write(açıdeğeri) komutu ve hemen ardından yazacağınız bir delay() komutu ile istediğiniz açı değerinde istediğiniz süre boyunca servonun sabit kalmasını sağlayabilirsiniz.
selam yardımcı olursanız sevinirim ARDUİNO İLE SERVO MOTOR VE LCD İLE MOTORU SAG SOL HAREKET ETTİRDİM FAKAT LCDDE EKRANA SAGA BASILDIGINDA 5 DERECE DÖNÜP EKRANADA O MESAJI İLETMESİ LAZIM EKRANDA MOTOR 5 DERECE SOLA İLERLEDİ DİGER BUTONA BASILDIGINDA MOTOR 5 DERECE SAGA İLERLEDİ VE HER BASTIGIMIZDA 5 10 15 ARTMASINI İSTİYORUM BUNU NASIL YAPARIM YARDIMCI OLURSANIZ SEVİNİRM
switch() ve case ile butonların işlevlerini oluşturabilirsiniz. Bir değişken ile servo motorun derecesini hafızada tutup bir butonun bu değere 5 eklemesini, diğer butonun 5 çıkartmasını sağlayabilirsiniz. Tabi ki bu değerlerin 0-180 arasında olması gerekecek. Her bir butona basıldıktan sonra servo.write(konum_degiskeni) komutunu verip altına da lcd.print() ile ekrana da bu değeri yazdırmanız mümkündür.
yardımcı olursanız sevinirimm
bu arduino konusunda yeni olduğum için kod konusunda bişey YAPAMADIM
arkadaşlar projem bu yardımcı olurmusunuz
Arduino iledc motor nasıl. Çalıştırabiliriz güneş takip sisteminde DC motor kullanicam 2 tane çok acil fikir verirseniz seviniiri
Merhabalar ben ses kartı kulanarak servo motorun sesin geldiği tarafa döndürmem gerek ama hep aynı tarafa dönemez belli bi miktar döndükten sonra 0 konumuna gelip kablolarım kopmasını önlemem lazım nasıl yapabilirim ?
Servo motorlar yazıda da belirtildiği gibi 0-180 derece arasında çalışırlar. Sürekli dönebilen servorlar bulunsa da, genellikle projelerde servo motor kullanılmasının amacı belirli açı limitlerinde hareket sağlamasıdır. İstediğiniz açı değerini deneyerek bulduktan sonra yazdığınız programda belirtirseniz sorunsuz bir şekilde kullanabilirsiniz.
Ben projemde 360 derece dönebilen servo motoru kullanmak istiyorum fakat tek tür işime yaramıyor onu 1360 dereceye örneğin götürebilmem gerekiyor, mümkün müdür?
Kullanmak istediğim servo : https://www.robotistan.com/powerhd-ultra-yuksek-guclu-dijital-servo-motor-lf-20mg-360-tam-tur-donebilir
360 derece dönebilen servo motor sürekli hareket edebilmektedir. Vermiş olduğunuz linkteki motoru sorunsuzca kullanabilirsiniz.
Merhabalar bütün yorumları tek tek okudum fakat kendi projemde yaşadığım soruna çare bulamadım.Benim bitirme tezimde arduino megayı MPU6050 sensör ile servo motor kontrolü yapmak istiyorum. Sensörün hareket hızına göre motor hzımı kontrol etmek istiyorum.(sensörü aşağı ve yukarı hareket ettirmek istiyoruz.Yürüyüş adımlarına benzer.)LÜTFEN YARDIMCI OLUNNN..
Merhabalar elimde (sg90) Servo Motor var. Akıllı çöp tenekesi projesi yapmaya çalışıyorum ama kapağı açtırmayı bir türlü başaramadım.Motorun kapağı açmaya gücü yetmiyor önereniz nedir. Bu motorun gücünü nasıl attırabilirim yardımlarınız için şimdiden çok teşekkür ederim.
merhabalar,
elimde 360 derece sürekli dönebilen bir servo var.servoyu mikrofon sensörüne bağlayıp alkış ile kontrolünü sağlamaya çalışıyorum herşey normal alkış çalınca istediğim yöne dönüyor ancak servo yu alkış çaldığımda belirli açılarda dönüp servo dursun istiyorum ancak servo durmuyor bunu durdurma kodu vs bişey varmı yardımcı olursanız sevinirim.
Motoru durdurmak için myservo.write(0) komutunu kullanabilirsiniz.
merhabalar hocam , arduino parmak izi okuyucu ile servo motoru aynı projede nasıl kullanabilirim ?
parmak izini okuyunca servo konum değiştirecek .
Çok basit bir if ile yapabilirsiniz. Hangi parmak izi okuyucuyu kullanacaksınız?
Aliexpresden aldım hocam fiyatı baya uygundu, Türkiye’dekilerden farklı biraz kablo yapısı.rx tx vcc gnd yi buldum tanıttım. Parmak izini okutup servo ile kilidi açıcam.
Prmak izi okuyucunun kendi kütüphanesinde örneklerde fingerprint var . Fingerprint ile parmağı okutuyorum , kodun son kısmına doğru parmak eşleşmesinden sonra servoyu hareket ettirecek kodu yazamadım malesef .
Merhaba,
Bir soru sormak istiyorum. Sistemimde Aktüatör kullanmak istiyorum.
“24 V DC 100 mm Lineer Aktüatör” Arduino ile servo motor kontrolünde olduğu gibi kontroll etmek istiyorum. Sitenizde satılan Aktüatör ün giriş kablolarını göremedim ama genel olarak 2 tane kablo girişi mevcut “volt” ve “ground”. Bunu Arduino ile kontrol edebilir miyim ? ve bunun için herhangi bir shield var mı bildiğiniz ?
Yardımlarınız için şimdiden teşekkür ederim.
Kolay gelsin ve iyi çalışmalar.
Lineer aktüatörün çalıştığı gerilim ve akımı karşılayabilecek bir motor sürücü kartı veya shield’ı kullanabilirsiniz.
hocam sağol verdiğin cevap için ancak şöyleki
myservo.write(360);
delay(15);
servo ya bu komutu verdikten sonra myservo.write(0); bu kodu nereye nasıl yazmalıyım ki servo dursun ?
ayrıca bu komutu yazdığım zaman servo yu ters yöne döndüremiyorum.
veya bu 360 derece servo için mesela 10 sn dönüp sonra durması için nasıl birsey yazmalıyım yardımcı olurmusunuz rica etsem.
myservo.write() komutunu 360 derece parametresiyle kullanamazsınız. 180 derece vermeyi deneyin. 10 sn dönüp sonra durması için de
myservo.write(180);
delay(10);
myservo.write(0);
komutlarını kullanabilirsiniz.
eyvallah hocam çok teşekkür ederim. deneyeceğim.
merhaba benim lise son proje ödevi olarak servo motorlu şifreli kapı kilidi uygulaması yapacagız uygulamanın program yazma kısmı bitti ama bana bunun devresini board üzerinde yapamadım bana yardımcı olurmusunuz
Arduino’dan gelen sinyal pinini servonun sarı ya da beyaz renkli kablosuna, 5V gerilimi kırmızı renkli kablosuna, GND pinlerinden herhangi birini de siyah renkli kablosuna takmanız gereklidir.
hocam işe yaramadı bu kodu kullanırken servo 10 sn sonra sekiyor ve aynı yöne tekrar dönüyor neden böyle olduğu hakkında fikriniz nedir?
“Sekmek”ten kastınız tam olarak nedir?
Ben potansiyometre ile ayarlanan hareketleri kayıt eden 2 eksenli bir robot kol yapmayı düşünüyorum.
Tek potansiyometre kullanarak bunu yapmak istiyorum ama başarısız oldum.
projenin orijinali;https://create.arduino.cc/projecthub/ChanR19/simple-programmable-robotic-arm-bd28a0?f=
kodum;
#include
Servo servo1; //Servos
Servo servo2;
const int LED1 = 2; //LEDs
const int LED2 = 3;
const int LED3 = 4;
const int LED4 = 7;
const int LED5 = 8;
const int button1 = 12; //Buttons
const int button2 = 13;
int button1Presses = 0; //Button values
boolean button2Pressed = false;
const int pot1 = A0; //Potentimeters
const int pot2 = A1;
int pot1Val; //Potentimeter values
int pot2Val;
int pot1Angle;
int pot2Angle;
int servo1PosSaves[] = {1,1,1,1,1};
int servo2PosSaves[] = {1,1,1,1,1};
void setup() {
servo1.attach(5);
servo2.attach(6);
pinMode(LED1, OUTPUT);
pinMode(LED2, OUTPUT);
pinMode(LED3, OUTPUT);
pinMode(LED4, OUTPUT);
pinMode(LED5, OUTPUT);
pinMode(button1, INPUT);
pinMode(button2, INPUT);
Serial.begin(9600);
}
void loop() {
pot1Val = analogRead(pot1); .
pot1Angle = map(pot1Val, 0, 1023, 0, 179);
pot2Val = analogRead(pot2);
pot2Angle = map(pot2Val, 0, 1023, 0, 179);
servo1.write(pot1Angle);
servo2.write(pot2Angle);
if(digitalRead(button1) == HIGH){ // This will check how many times button1 is pressed and save the positions to an array depending on how many times it is pressed; switch/case works like a if statement
button1Presses++;
switch(button1Presses){
case 1:
servo1PosSaves[0] = pot1Angle;
servo2PosSaves[0] = pot2Angle;
digitalWrite(LED1, HIGH);
Serial.println(“Pos 1 Saved”);
break;
case 2:
servo1PosSaves[1] = pot1Angle;
servo2PosSaves[1] = pot2Angle;
digitalWrite(LED2, HIGH);
Serial.println(“Pos 2 Saved”);
break;
case 3:
servo1PosSaves[2] = pot1Angle;
servo2PosSaves[2] = pot2Angle;
digitalWrite(LED3, HIGH);
Serial.println(“Pos 3 Saved”);
break;
case 4:
servo1PosSaves[3] = pot1Angle;
servo2PosSaves[3] = pot2Angle;
digitalWrite(LED4, HIGH);
Serial.println(“Pos 4 Saved”);
break;
case 5:
servo1PosSaves[4] = pot1Angle;
servo2PosSaves[4] = pot2Angle;
digitalWrite(LED5, HIGH);
Serial.println(“Pos 5 Saved”);
break;
}
}
if(digitalRead(button2) == HIGH){ // Pretty self-explnatory here
button2Pressed = true;
}
if(button2Pressed){ // if the boolean button2Press is true, then the servos will run though all their saved positions
for(int i = 0; i < 5; i++){
servo1.write(servo1PosSaves[i]);
servo2.write(servo2PosSaves[i]);
Serial.println(" potentimeter Angles: ");
Serial.println(servo1PosSaves[i]);
Serial.println(servo2PosSaves[i]);
delay(1050);
}
}
delay(300);
}
hocam şöyle yarım saniye durup tekrar aynı yöne doğru hareket ediyor bunu nasıl çözebilirim.
kodlara nasıl ulaşıyoruz
Yazıda da anlattığımız gibi,
Uygun koda Arduino programından
Dosya > Örnekler > Servo > Sweep
adımlarını takip ederek ulaşabilirsiniz.
Bir sorum var ben bir proje yaptım fakat servo motor sg90 olanlarından 180 derece döne bilirken benimki 360 derece dönüyor ce tek yön saat yönünde sizce bozulmuş mu ?
Motor içerisindeki dişlide yer alan durdurucu tırnaklar kırılmış olabilir.
merhaba, arduino ile çalışmak istiyırum fakat programı bilgisayarıma indirdiğimde kod yazamıyorum, program hiçbir şey yapmama izin vermiyor. Bu sorunu nasıl çözerim?
Yaşamış olduğunuz sorunu daha detaylı bir şekilde bu konu altına yazarsanız daha kolay bir şekilde yardımcı olabiliriz: Arduino’da Hata Mesajı Aldıysan Bu Sayfa Senin İçin – Hata Yaptıkça Gel.
ben arduino kapı kilidi yapacam servonun açısını nasıl bilebilirim
Cavap bekliyorum
🙂 iyi çalışmalar
myServo.write(açı değeri) ile deneme yaparak uygun açıyı bulabilirsiniz.
Merhaba
Nrf24l01 ile servo motor surmek istiyorum
Alici devre sinde sg90
Verici devresinde 10k pot kullanıyorum fakat
Potansiyometre yi bi yerden sonra cevirince servo motor calismiyor
Bu arada bilgisayar uzerinden besliyorum arduino lari
Sorununuz yazılımsal gibi görünüyor, ayrıca harici bir 5V güç kaynağı ile beslemeyi de deneyebilirsiniz. USB üzerinden gelen akım yetersiz kalıyor olabilir.
Merhaba elimde sg90 servo motor var.Basit robot kol denemesi yapıyorum ama butona basılınca servonun açı değerinin artmasını yapamıyorum yardımcı olabilir misiniz?
Merhabalar. Elimde hediye gelmiş olan 5 mg996r servo motor bulunan bir robot kolu bulunmaktadır.
5 ini birden arduinoya bağlayıp çalıştırdığım zaman bir kaç defa kod ile çalıştırabiliyorum daha sonrasında kendi kendine sapıtıyor ve arduinonun kablosunu çekmek zorunda kalıyorum. Bunları yaparken farkettimki arduino nun üzerindeki 50bY yazan bir modül çok ısınıyor. İnternette biraz araştırdım ve sanırsam regülator. Direk kablo bağlantısı yaptığımdan dolayı nasıl o kadar ısındığını anlayamadım yardımcı olursanız sevinirim.
Merhaba,
Ben bitirme projemde sürekli dönebilen servo motorları yaylara bağladım ve gerekli if koşulu sağlandığında bu yaylar belli ürünler düşürecek ama benim servo motorum sürekli dönüyor bir ürün düşürmesi gerekirken durmadığı için bütün ürünler düşüyor ve ben motorları hiç bir şekilde durduramıyorum
for(int i=0;i<=180;i++)
{
servo1. write(i) ;
delay(15);
servo1. write(0);
delay(15);
}
Bu şekilde yazdım ama hiç bir sekilde durmuyor loop sadece bir kere çalışsın diye while(1); bile kullandım, arduino konusunda çok yeni olduğum için yanlışın nerde olduğunu anlayamıyorum bir yorumda dönüş süresine bakın bir tur için sonrada kaç tur dönmesini istiyorsanız o sayıyla çarpıp delay e ekleyin o süre kadar bekler, (bir turunu 0.84 saniyede tamamlıyor yaklaşık olarak) 0.84 saniye kısa bir süre delay in içine çok büyük sayılarda yazdım , servo motorlar mı bozuk yoksa ben bir seyi yanlış mı yapıyorum durmuyor bu motorlar, sadece bir kere if komutu sağlanıyorsa mesela 2 saniye çalışışsın ve dursun bana örnek bir kod gösterip yada nasıl yapacağımı anlatırsanız çok sevinirim…
kodub bulamıyorum dosya örnekler felan demişsiniz ama nerde yardımcı olabilirmisiniz
Hallettim teşekürler ama ardiuno kabloyu cıkarıp takınca calısıyor sadece yada cok gec calısıyor hangı kodu degıstırmlıyım 5snde bir çalıssın istiyorum
Merhaba mesafe sensörü ile servo motor kontrolü yapmak istiyorum.Kodları yanlış yapmışım galiba siz kod gönderirmisiniz lütfen.
merhaba ben doğrusal bir hareketi kaydedip servoda aynı hareketi tekrar etmesi için kaydetmek istiyorum bunun için ne yapmam gerekiyor. (örnek: tornada x çapta bir şey çıkaracağım. önce onun çapını tarayıp sonra tornada aynı şekli çıkaracağım :))
sa arkadaşlar ardiuno ile asansör kapısı kontrol kartı yapabilirmiyim acaba ?
Aynı anda 2 farklı servo motor Bluetoothla kontrol edilebilirmi?
Edilebilirse nasıl edilir?
Tek servo motor için harici bir güç kaynağı kullanılmalı mı? Direkt olarak arduino pinlerini kullanabilir miyim?
ben asma kilit ile bir kutu kapağını açtıracağım. yalnız kutu tavana monte ve kapak aşağı doğru açmasını planlıyorum, kapak üzerinde 1,5- 2 kg ağırlığında malzeme var. nasıl bir servo motor tercih etmeliyim.
Merhaba elimde FS5106R motor var ve bu motor sürekli dönüyor arduino örneklerdeki kodu (180 e git gel ) yüklememe rağmen sadece ileri doğru dönüyor. Açı değerlerini değiştirince de sadece hızı değişiyor. Ben bu motoru belirli açı değerlerinde nasıl değiştiririm?
Merhaba,
Potansiyometre kullanarak servonun konumunu belirliyorum, EEPROM ile servo konumunu 1.Butona basarak kaydedip 2.Butona basarak kaydettiğim konuma dönüyorum. Burda 1.konum ile 2. konum arasındaki hızı 2.bir potansiyometre ile nasıl belirlerim. Yardımcı olursanız sevinirim.
#include
#include
Servo sg90;
const byte pot_pin = A1;
int pot_speed = A2;
int pozisyon ;
int pot_deger;
int butonPin = 2;
int butonPin2 = 3;
int butonPin3 = 5;
int butonDurum = 0;
int butonDurum2 = 0;
int butonDurum3 = 0;
int a;
int c;
void setup() {
sg90.attach(4);
Serial.begin(9600);
pinMode(butonPin, INPUT);
pinMode(butonPin2, INPUT);
pinMode(butonPin3, INPUT);
}
void loop() {
butonDurum = digitalRead(butonPin);
butonDurum2 = digitalRead(butonPin2);
pozisyon = map(analogRead(pot_speed), 0, 1023, 0, 181);
pot_deger = map(analogRead(pot_pin), 0, 1023, 0, 181);
sg90.write(pot_deger);
delay(50);
Serial.println(pot_deger);
if (butonDurum == HIGH) {
EEPROM.write(a, pot_deger);
}
if (butonDurum2 == HIGH) {
while(1){
c = EEPROM.read(a) ;
sg90.write(c);
Serial.println(c);
butonDurum3 = digitalRead(butonPin3);
if (butonDurum3 == HIGH){
break;
}
}
}
}
4 tane dc motor ve 4 tane servo motor kullanacagim robotumda kullanmam gereken shield ve motor sürücü kartları neler olabilir ?
Dersleri takip ediyorum fakat o kadar da ilerleme kaydedemedim. Algoritma öğrenme ile ilgili bir sorunum var galiba.
Merhabalar benim bir projem var. RFID kullanarak servo motor döndürmek istiyorum ancak servo motoru RFID okunduktan sonra 45 derece döndürüp ,tekrar RFID okunana kadar beklemesini istiyorum. RFID 2. defa okunduğunda, kaldığı yerden devam edip bir 45 derece daha dönmesini istiyorum ancak bu olayı çözemedim. Yardımcı olursanız sevinirim.
Ben bu projeyi VNH2SP30 14A calıştıra bilirmiyim peki 12v silecek motorlarında yardımvı olursanız size mşnnetterkar kalacagım saygılar…
VNH2SP30 sürücüsü standart bir DC motor sürücü kartıdır. Malesef servo kütüphanesi ile bu sürücü kartı kullanamazsınız.
Mikro servo motor ile bıldırcın kuluçka makinası yaptım. Servo motoru kapatıp yeniden açtığımda servo başlangıç konumuna hızla gidiyor ve yumurtaları savuruyor. Servonun en son kaldığı yerden başlamasını sağlayabilirmiyim? Ya da kapattığımda beslemeyi hemen kesmesin, servo başlangıç konumuna yavaşça gitsin ve orada beslemeyi kessin. Böyle bir şey mümkün mü acaba? Saygılar.
Peki ldr kontrolü ile servo motor çalıştırma kodunu nasıl yazabilirim
merhabalar cnc sheld kullanıyorum servo motor saat yönü tersinde dönüyor , devamlı saat yönunde donmesini istiyorum ne yapmalıyım
333hz r30 servo adet ve mg90 1 adet potansiyometre ile kontrol etmek istiyorum kararsızlıklar ve titreşimler var ne yappmalıyım
Eksi kabloları ortak yapmayı, güç hatlarını ise dışarıdan beslemenizi öneririm.
Benim bir sorum var.Servo motorlarlarını 150 dereceye çekip sonra bir tuşa basıp 180 dereceye çevirmek istiyorum bunu nasıl yapabilirim ?
Buton ile gerekli kontrolü yaptıktan sonra tıklama sayısını tutup if ve else kontrolüyle birlikte bu projeyi yapabilirsiniz.
Merhaba Kerem bey
Birinc sorum robotik kolda İlk 3 eksen için 360 derece mi 180 derece mi servo iyi olur
İkinci sorum gripper yakaladığı anda LED yanması işlemi nasıl yapılabilir teşekkürler
360 derecelik servo motor kullanabilirsiniz. Gripper’e bir adet anahtar bağlayıp anahtara cisim değdiğinde yanmasını sağlayabilirsiniz.
Merhaba benim bir sorum olacak. bitirme projemde arduinolarda kullanılan atmega328p-pu işlemcisi ile atmel studio üzerinden robot kol yapmam gerekiyor bu konuda yardımcı olabilecek arkadaş var mı
mg90s servo
Merhabalar 4 servo 4 pot ile robot kol yapıyorum potların 4ünüde bağladığımda herhangi bir tepki vermiyor fakat tek veya 2 tane bağladigimda çalışıyor sorun ne olabilir
Güç yetersiz kalıyor olabilir. GND’ler ortak olma şartıyla, 5V 2A’lık bir adaptör bağlayabilirsiniz.