Merhaba arkadaşlar. Bu yazı serimizde günümüzde pek çok alanda yaygın kullanıma sahip olan robotları inceleyeceğiz. Robot nedirden, kısaca robotların tarihçesinden, kullanım alanlarına göre robotlardan ve robotların genel yapısını oluşturan parçalardan bahsedeceğim.
Robot Nedir?
Robot: sensörleri ile çevresini algılayan, algıladıklarını yorumlayan, yorumlama sonucu bir karar veren, verdiği kararı bir çıkış sinyali ile üreten aygıtlara robot denir. Robotlar bu çıkış sinyalini bir motor, LED veya herhangi bir aktüatör ile verebilir. Otonom karar veremeyen aygıtlar robot değildir.
Robotların Tarihçesi
“Robot” kelimesi ilk defa Karel Copek isimli Çekoslovak bir yazar tarafından 1921 tarihli Rossum’s Universal Robots isimli tiyatro eserinde kullanılmıştır. Bu kelimenin anlamı “zorla çalıştırılan işçi”dir.
Fikir olarak robot, 3000 sene öncesinde Homeros tarafından İlyada eserinde bahsedilir. Aynı şekilde Jason ve Argonotlar isimli Eski Yunan efsanesinde, Girit adasını korumak için “programlanmış” Talos isimli bir dev bronz nöbetçinin de bahsi geçer.
İlk bilgisayar olarak kabul edilebilecek abaküs ise İ.Ö. 1000 yıllarında Hindistan’da kullanılmıştır. İ.Ö. 300’lü yıllarda mühendisler su ile çalışan otomatlar oluşturmuşlardır. İ.Ö. 250 yılında İskenderiye’li Ctesibius isimli mucit suyla çalışan bir saat yapmıştır. Bu icat, ilk nesil robotlara önayak olmuştur.
1350 yılında Strazburg’da bir katedralin tepesine, her gün öğlen saati kanat çırparak ötecek bir otomatik horoz yerleştirilmiş, 1947’de Venedik’teki San Marco meydanındaki büyük saat kulesine iki dev zangoç yapılmıştır. Aynı dönemde ise Eb-ül-İz-El-Cezeri isimli bir Arap, otomatlar hakkında bir kitap yazmıştır. Bu kitapta çamarşır teknesini doldurup boşaltabilen otomatik bir Arap kadını resmedilmiştir.
Kullanım Alanlarına Göre Robotlar
-
Endüstriyel Robotlar
Endüstriyel robotlar, sıklıkla fabrikaların montaj, kaynak, paketleme ve paletleme gibi bölümlerinde kullanılırlar.
En çok bilineni, 6-eksenli artiküle tip robot kollarıdır:

Bunların yanı sıra kartezyen robotlar, scara robotlar, delta robotlar gibi birçok endüstriyel robot çeşidi bulunmaktadır. Bu robotların en büyük özellikleri oldukça hassas hareket edebilmeleri ve uzun ömürlü olmalarıdır. İnsanların çalışmaması gereken tehlikeli ortamlarda, yüksek hassasiyet isteyen uygulamalarda insanlara karşı büyük avantaj sağlamaktadırlar (örn. otomobil boyama uygulaması).
-
Ev Tipi Robotlar
Çoğunlukla ev ortamında temizlik amaçlı kullanılan robotlar bu kategoriye girmektedir. Siz sormadan söyleyelim, süpürge veya mutfak “robotu” malesef robot tanımına girmemektedir 🙂 (robotun tanımı hakkında daha fazla bilgi için videomuzu izleyebilirsiniz).
Süpürge, cam ve havuz temizleme gibi işlerde kullanılan robotlar bu sınıfa dahil edilebilir.



-
Eğlence, Hobi ve Yarış Robotları
Bizim en çok ilgileneceğimiz tipteki robotlar bunlardır. Çizgi izleyen, engelden kaçan, sumo robotların yanı sıra paletli robotlar, örümcek robotlar, drone’lar gibi bir çok hobi robotu çeşidi sayabiliriz.

Robot Parçaları
Kendi robotumuzu biraraya getirebilmek için aşağıdaki parçalara ihtiyaç duymaktayız:
-
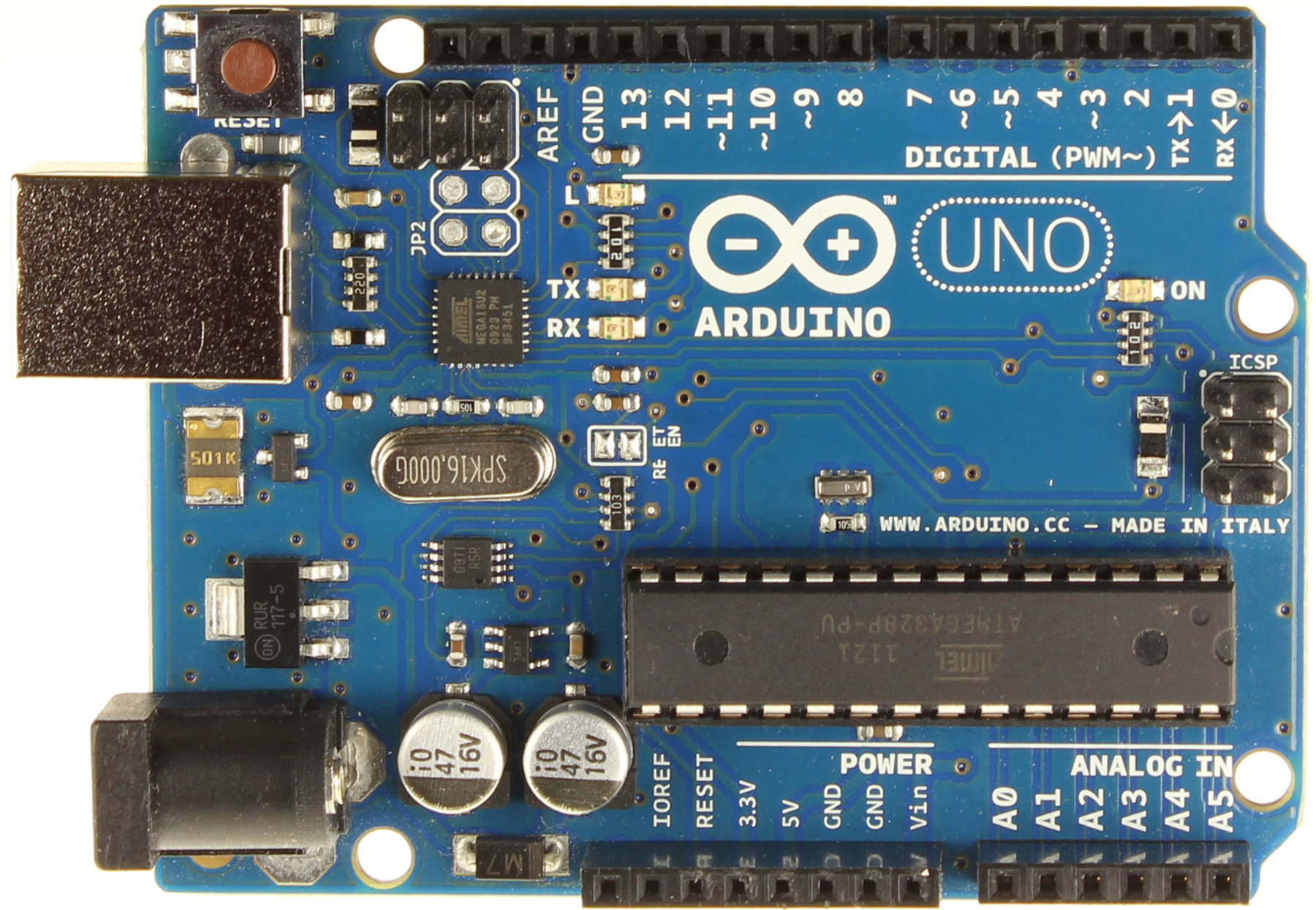
Kontrol Kartları
Bütün robotu yönetecek olan “beyin” bu parçadır. Bu kartlar sayesinde çevredeki sensörlerden bilgiler alınır, işlenir ve motor gibi çıkış birimlerine komut verilir. Arduino gibi mikrokontrolcü kartları sıklıkla tercih edilir. Bunun yanı sıra Raspberry Pi gibi tek kart bilgisayarlar da tercih edilebilir. Burada karar vermemizde en önemli rolü robotumuzda kullanacağımız sensör ve motor gibi diğer çevre bileşenlerinin sayısı belirleyecektir. Daha fazla sayıda harici eleman için doğal olarak daha fazla sayıda giriş/çıkışa sahip kontrol kartları gerekecektir.
-
Mikrokontrolcüler
Mikrokontrolcü kartları (PIC, Arduino, ESP8266, mBed v.b.) ile tek kart bilgisayarların (Raspberry Pi, Orange Pi, BeagleBoard v.b.) en büyük ayrıldıkları nokta şudur: Mikrokontrolcü kartı yalnızca bir programı çalıştırmaları düşünülerek tasarlanırlar. Ayrıca mikroişlemci ile mikrokontrolcü farklı kavramlardır. Mikroişlemci, mikrokontrolcünün aritmetik ve lojik işlemlerinden sorumlu birimidir. Mikrokontrolcüde işlemci biriminin yanı sıra, RAM bellek, ROM bellek, flaş hafıza, haberleşme birimleri (I2C, SPI, UART v.b.) de yer almaktadır. Sadece tek bir programı çalıştırmaları öngörüldüğü için RAM ve ROM bellekleri günlük hayatta kullandığımız bilgisayarlarımızdan çok daha az miktardadır (KB’lar mertebesinde). Sensör bilgisi okumak, motor çalıştırmak, haberleşme birimlerini yönetmek gibi işlemler için bu kapasite genellikle fazlasıyla yeterli olacaktır.
-
Tek Kart Bilgisayarlar
Tek kart bilgisayarlar ise, isimlerinden de bir miktar anlaşılacağı üzere günlük hayatta kullanmakta olduğumuz bilgisayarlar gibi işlev görebilirler. Bu demektir ki, aynı anda birden fazla programı çalıştırabilecek işlemci birimleri, RAM ve kalıcı belleğe, birden fazla giriş ve çıkış birimine sahiptirler. Daha fazla işlem gücüne sahip olmalarının iyi olduğunu düşünebiliriz, fakat bu bilgisayarlar aynı anda birden çok işi; örneğin web tarayıcı açıkken bir yandan müzik çalmak, bütün bu işlemlerler devam ederken klavye/fare gibi giriş birimlerinden girdi alarak ekran gibi çıktı birimlerini yönetmek gibi yaptıklarından dolayı, bu işlemlerin yanında zaman-kritik uygulamaları yapmakta (örneğin servo motor sürmek) her zaman çok başarılı olamamaktadırlar. Bunun yanında kamera gibi görüntü birimlerini yönetebilecekleri ve çok daha yüksek işlem kapasitesi sunabildiklerinden dolayı örnek olarak bir görüntü işleme uygulamasında bu kartları tercih etmek daha mantıklı bir hareket olacaktır.
Nasıl Tercih Yapmalı?
Kontrol kartı tercih ederken ilk dikkat etmemiz gereken nokta projemizin karmaşıklık seviyesidir. Eğer komutlarımızı takip edecek veya çizgi izleme/engelden kaçma gibi görevleri yapacak basit bir mobil robot tasarlayacaksak mikrokontrolcüler işimizi görecektir. Fakat görüntü işleme, yapay zeka gibi işlem gücüne ihtiyaç duyacak görevlerde tercihimizi tek kart bilgisayarlardan yana kullanabiliriz. Bunun yanı sıra, tek kart bilgisayarın yanına bir mikrokontrolcü ekleyerek birbirleriyle haberleşmesini sağlayarak her iki dünyanın da iyi yanlarından faydalanmamız mümkündür 🙂
İşlem gücünün yanı sıra, elbette bir sonraki önceliğimiz kullanacağımız kontrol kartının giriş/çıkış sayısıdır. Kullanacağınız kontrolcünün robot projenizde kullanacağınız giriş/çıkış birimine yetecek kadar miktarda giriş/çıkışa sahip olması gereklidir. Burada bir diğer dikkat etmek gereken nokta, Arduino gibi kartların farklı modellerinde farklı yeteneklere sahip çeşitli sayıda giriş/çıkış sayısına sahip olmalarıdır. Örneğin, motor sürmede hız kontrolüne ihtiyaç duyacaksanız, kontrolcünüzün motor sayısı kadar PWM çıkışa sahip olması gereklidir.
Kontrol kartı tercih ederken dikkat etmeniz gereken bir diğer nokta ise desteklediği programlama dilleri ve popülaritesidir. Deneyimli kullanıcılar için popülarite çok önemli olmasa da, özellikle yeni başlayacaklar için kartın çeşitli çevre birimleri ile ilgili örnek programlar ve kütüphaneler, yapılmış başka benzer projeler bulunması faydalı olacaktır. Bunun yanı sıra popüler programlama dillerinden olan C/C++ ve Python destekleyen bir kart tercih etmek, yeni başlayanlar için yine daha iyi olacaktır.
-
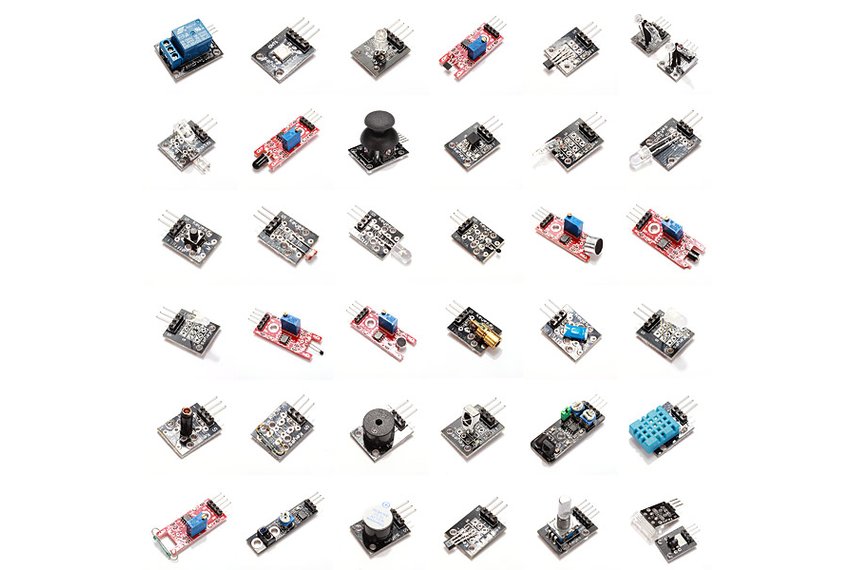
Sensörler
Robot projemizde ışık, sıcaklık, mesafe gibi fiziksel büyüklükleri elektrik sinyallerine dönüştürmek ve bu bilgileri işleyecek karar mekanizmaları kurabilmek için sensörleri kullanırız.
Sensörleri temel olarak iki çeşitte inceleyebiliriz: analog ve dijital. Analog sensörler, algıladıkları fiziksel büyüklüğe orantılı olarak değişen bir akım veya gerilim çıktısı verirler. Bu tipte sensörleri dijital çalışan kontrol kartlarımıza bağlayabilmek için analog-dijital çeviriciler (ADC) kullanılır. Analog-dijital çeviriciler mikrokontrolcüler içerisinde de yer alacağı gibi (örn. Arduino analog giriş pinleri), sayısının veya hassasiyetinin yetmemesi durumunda harici olarak da bağlanabilirler. Popüler bir tek kart bilgisayar olan Raspberry Pi ise malesef dahili olarak analog-dijital çeviriciye sahip değildir. Dolayısıyla analog girişe ihtiyaç duyduğumuzda harici bir entegre kullanmamız gerekecektir.
Dijital sensörler ise genellikle I2C, SPI, OneWire v.b. bir haberleşme protokolü aracılığıyla bilgisayar (mikroişlemci) ile konuşurlar. Bunun yanı sıra, çoğu analog sensör bir op-amp ile birlikte kullanılarak belirli bir seviye üzerinde lojik 1 (genellikle 5V veya 3.3V) çıkışı verecek şekilde kullanılabilir. Böylelikle analog çıkışlı sensörler, Raspberry Pi gibi ADC’ye sahip olmayan kontrolcüler ile kullanılabilir.
-
Motorlar
Robotlarda kullanım alanlarına göre servo motor, DC motor (fırçalı-fırçasız) ve step motor çeşitleri tercih edilir. Motor tercihi bir robotun beklenen performansta çalışması için en önemli etkenlerden biridir. Robotlarda motor tercihi yaparken motor tipinin yanında fiyatı, kullanım kolaylığı, güç-tork-hız-pozisyon kontrolü gibi karakteristikleri de seçimimiz için önemli kriterler olacaktır.
Hadi biraz bu motor tiplerinden bahsedelim.
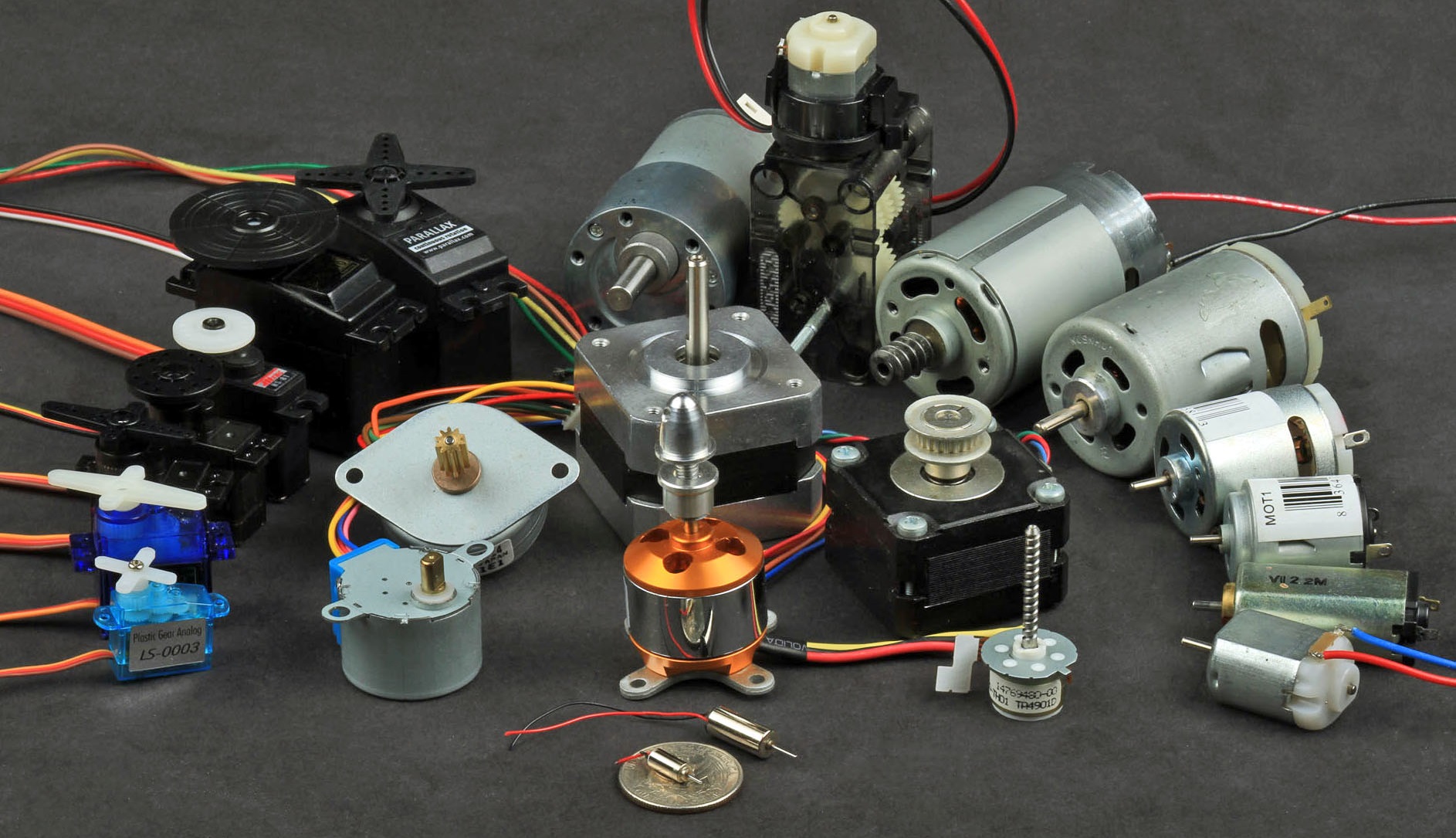
DC Motorlar
Robotikte en sık tercih edilen motor tipidir. DC motorlar fiyat,boyut ve güç bakımından bol çeşitliliğe sahiptir. Fırçalı ve fırçasız olmak üzere iki tür DC motor vardır.
Fırçalı DC Motorlar
En eski ve en sık kullanılan DC motor tipidir. Mini sumo, çizgi izleyen gibi basit mobil robotik uygulamalarında sıkça tercih edilirler. Uygun fiyatlı ve kullanımı kolaydır. Ayrıca daha önce bahsettiğimiz DC motor çeşitleri hakkındaki yazımıza buradan erişebilirsiniz.
Fırçalı DC motorlar, redüktörlü ve redüktörsüz olmak üzere ikiye ayrılır.
Redüktörlü DC Motorlar
Redüktör, motor gövdesi içine yerleştirilmiş miller, dişliler vb. gibi elemanlardan meydana gelen sistemlerdir. Redüktörün amacı motora bir dönme yönü kazandırmak, az güç ile yüksek tork elde etmektir. Seçtiğimiz motorun redüktörlü olması robotumuzun hızı için harcayacağı gücü, torkuna kazandırmış olacaktır. Mini sumo robot, rover gibi projelerde redüktörlü motorlar sıkça tercih edilir.
Redüktörsüz DC Motorlar
Yüksek torka ihtiyaç duymadığımız, motor devrine daha fazla önem verdiğimiz projelerde redüktörsüz motorlar kullanılır. Çizgi izleyen robot gibi güce ihtiyaç duymadığımız projelerde redüktörsüz motorlar tercih edilebilir.
Fırçasız DC Motorlar
RC (Uzaktan kumandalı) model araçlarda oldukça sık kullanılan bir DC motor tipidir. Projemizde bir fırçasız motor kullanmak istiyorsak mutlaka bir de motor sürücüye ihtiyacımız vardır. Fırçasız motorlar motor sürücü olmadan çalışmazlar. Bu motor sürücülere modelciler ESC (Electronic Speed Controller) ismini vermişlerdir. Fiyat olarak fırçalı motorlardan daha pahalıdırlar fakat bakımları kolaydır ve yüksek performansa sahiptirler. Genellikle drone’lar, su altı robotları, uzaktan kumandalı araçlar ve hovercraft’larda bu tip motorlar kullanılır.

Servo Motorlar
Servo motorlar, kullanımlarının kolay olması ve özel bir kontrol devresine gerek duymamaları sebebiyle robotik projelerde sıklıkla kullanılırlar. Kendi kontrol devrelerine sahiptirler (Kontrol devreleri içlerindedir). Genellikle 180° açı ile çalışırlar, özel olarak 360° açı ile çalışan servo motorlar da bulunur. Böcek robotlar, robot kolları gibi birçok robotik projede kullanılırlar. Pozisyon kontrolü gerektiren projeler için önemli bir motor tipi olsa da hareketinin kısıtlı olması servo motorların kullanım alanlarını daraltmaktadır.

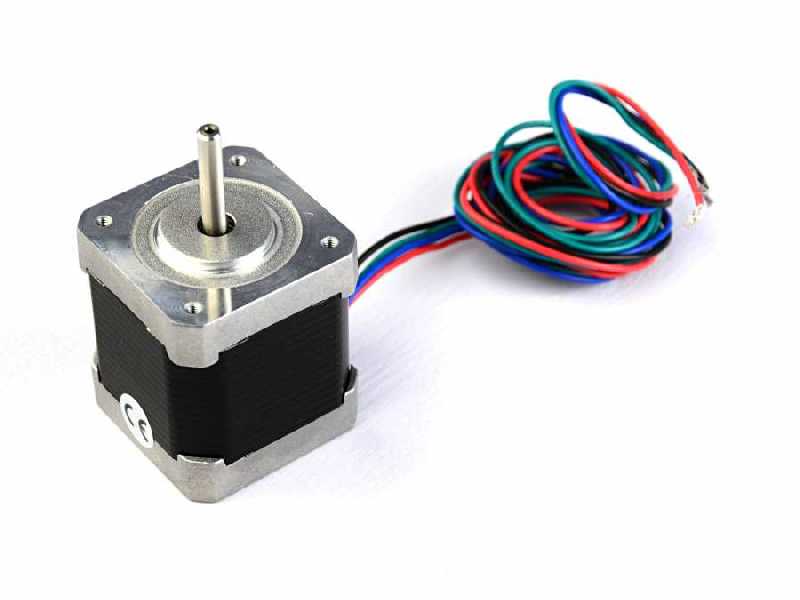
Step Motorlar
Step motorlar, fırçalı ve fırçasız DC motorlar gibi sürülebilen ve çok hassas konum kontrol imkanı sağlayan motorlardır. Endüstriyel olarak CNC tezgahları ve 3 boyutlu yazıcılarda kullanılsalar da robotik alanında Plotter robot, robot kol gibi projelerde sıklıkla kullanılırlar. Step motorlar fazlasıyla hassas pozisyon ve hız kontrolüne ve düşük devirde yüksek tork özelliklerine sahip olsa da harici konum limitlemeye ihtiyaç duyar ve verimliliği düşüktür.
-
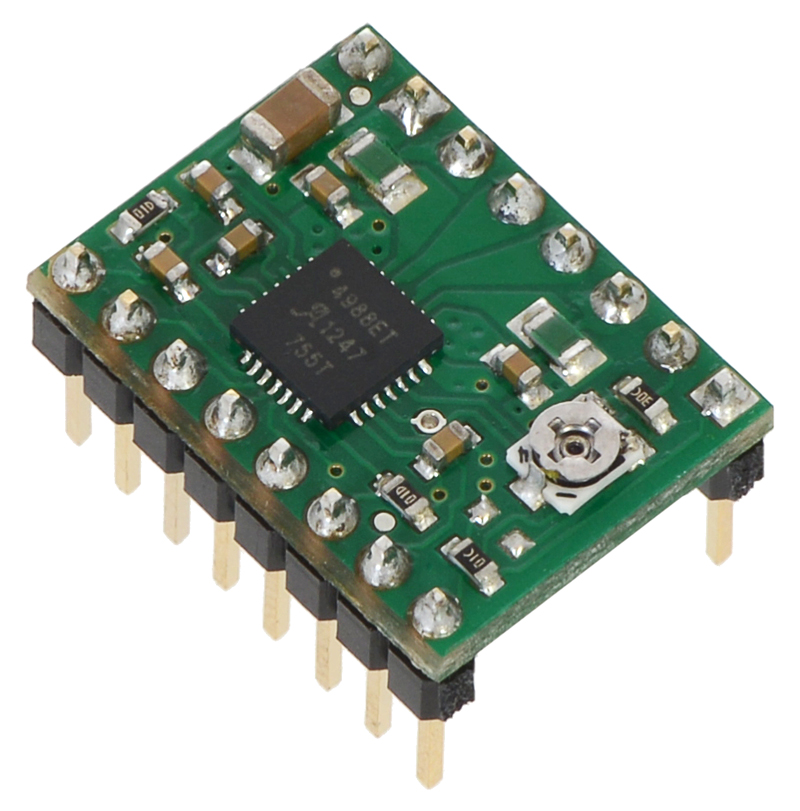
Sürücüler
Motor sürücüler, projelerde kullanılan motorların pwm ayarlarını kontrol etmemizi sağlar. Yani bu sayede motorlarımızın hızını ve yönünü kontrol edebiliyoruz.
Projemizde kullanacağımız motor tipine göre uygun bir motor sürücü seçmemiz gereklidir. Burada dikkat edeceğimiz nokta, kullanacağımız motorun üzerine bineceği yüke göre ne kadar akım çekeceğidir. Bu akım değerine uygun motor sürücü tercih etmemiz lazımdır. Yani robotumuzda kullandığımız motorlarınız toplamda 2A akım çekiyor ise kullanacağımız motor sürücünün 2A çıkış vermesi istenen performans için yeterli olmayabilir. Bunun sebebi motorların normalde çektikleri akımın dışına çıkabilmeleridir. Motor, kalkış anında aşırı akım çeker. Akım dağılımları konusunda işimizi garantiye alacak şekilde motor sürücü tercihi yapmalıyız.
Ayrıca farklı tipte motorlara ait sürücüler birbiri yerine geçemez; yani fırçasız motor için alacağınız motor sürücü (ESC), fırçalı motorunuzu sürmekte kullanamayacaksınız.

Fırçalı DC motorlar için L293B, L293D gibi motor sürücü entegreleri vardır. Motor sürücü kartları gibi yer kaplamamalarını istediğimiz projelerde bu motor sürücü entegreleri direkt olarak motorlara bağlayabiliyoruz. Bunun yanında içerisinde L298N entegresi bulunan L298 motor sürücü kartı da sıklıkla kullanılan tercihler arasında.


-
Piller
Piller, robot projemizin hayat kaynağı olan elektriği sağlamak için kullanılırlar. En basit çözüm, çoklu kalem pil yuvaları ve kaliteli alkalin veya şarjlı tipte (NiMH – nikel metal hidrit) kalem pil kullanmak olacaktır. Fakat bu tip pillerin yeterli olmadığı durumlarda liytum piller kullanabiliriz. Lityum piller ağırlık/boyutlarına kıyasla en yüksek enerjiyi verebilen pil türüdür, fakat dikkatli şekilde kullanmamız gereklidir. Biraz da pil türlerini ve kullanımlarını inceleyelim.

Lityum Piller (Li-Ion , Li-Po)
Lityum piller şarj edilebilen pillerdir. Robotikte kullanılan 2 çeşit lityum pil vardır. Lityum-İyon ve Lityum-Polimer piller. Li-Ion pillerin Li-Po pillere göre enerji yoğunlukları daha yüksektir. Bunun dışında karakteristikleri aynıdır. Lityum piller diğer piller ile kıyaslandığında çok daha hafif olmalarıyla beraber yüksek enerji kapasitesine sahip olmaları sebebiyle robotik projelerde en sık kullanılan pil türüdür.
Li-Po Pilin Şarjı ve Deşarjı
Li-Po piller hücrelerden oluşur. Her hücrenin kendine ait voltajları vardır. Li-Po pilleri şarj ederken hücre başına 4.2V’un üzerine çıkarmamamız gerekmektedir. Bunun yanında, pilleri akım kapasitelerinin üstünde şarj etmemeliyiz. Örneğin 2200mA’lik bir pil, 2200mA’den fazla akımla şarj edilmemelidir. Aksi halde pillerin ömrü kısalabilir ve bozulmalar meydana gelebilir.
Li-Po pilleri şarj etmemiz için bazı özel cihazlar kullanmamız gerekiyor. Buradan detaylı bilgiyi edinebilirsiniz.
Deşarj konusunda ise Li-Po pillerin hücre voltajlarını 3.3V altına düşürmememiz gerekiyor. Aksi takdirde yine pilimizde sorunlar meydana gelebilir.
Pilimizdeki hücre voltajlarını test etmek için pilimizin çıkışlarını bir Li-Po seviye ölçer bağlayabiliriz.
Li-Po piller ile ilgili çekmiş olduğumuz videoyu izlemenizi tavsiye ederiz.

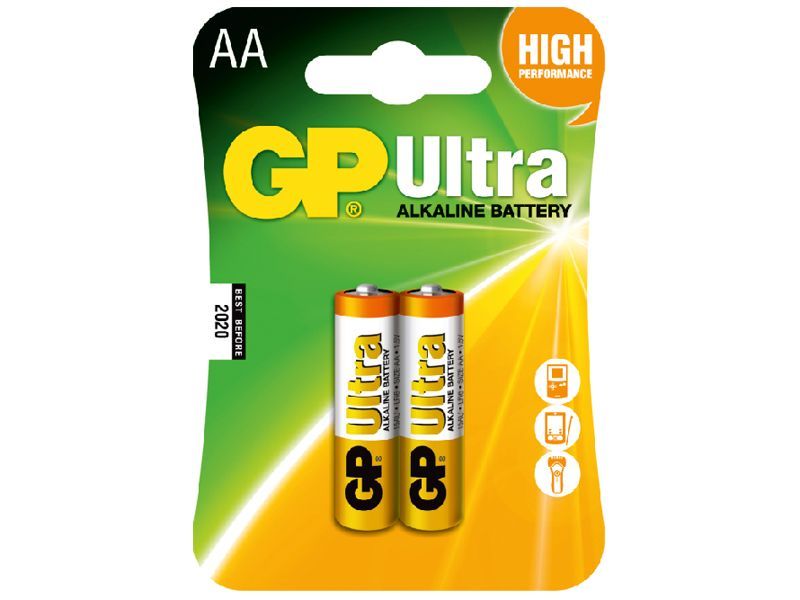
Alkalin Piller
Çinko ve manganez oksidin tepkimeye girmesiyle oluşan pillere Alkalin pil denir. Alkalin piller şarj edilemezler. Kolay bulunabilmeleri, fiyatlarının uygun olması, enerji yoğunluklarının fazla olması ve raf ömürlerinin uzun olması gibi fazlasıyla avantaja sahiptirler. Robotik alanda en çok kullanılan pil türüdür.
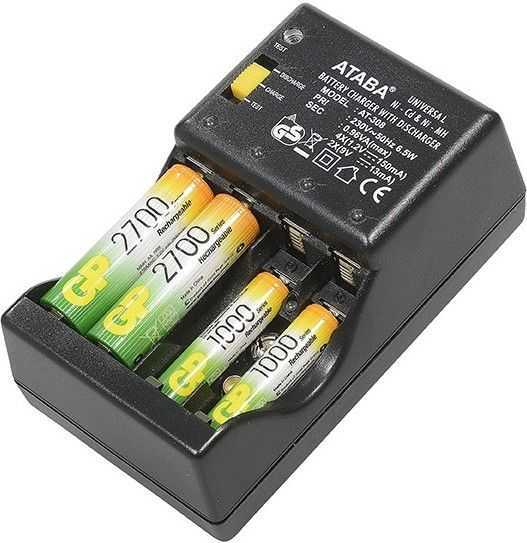
Nikel-Metal Hidrit Piller (Ni-MH)
Şarj edilebilir bir pil türüdür ve uzun ömürlüdür. Tamamen deşarj olmadan şarj edilmemelidirler, aksi takdirde enerji kapasiteleri ve ömürlerinde düşüş meydana gelir. Uzun ömürleri ve yüksek enerji kapasiteleri sebebiyle robotikte sıklıkla tercih edilirler.
Ni-MH piller kendilerine özel adaptörler ile şarj edilebilirler. Bu adaptörler ile pillerin doluluk oranını kontrol edebilir ve deşarj işlemi imkanına sahip olabilirsiniz.
Çinko-Karbon Piller
Çinko karbon piller uygun fiyatlı olup az enerji gerektiren projeler için idealdir. Robotikte enerji kapasitesi önemli olduğundan dolayı çok tercih edilmezler.
Kurşun-Asit Aküler
Kurşun-asit aküler günümüzde en yaygın akü türüdür ve şarj edilebilirler. Fazla ağır olmaları robotik projeler için bir dezavantajdır. Alarm sistemlerinde, yüksek akım ve kesintisiz enerji gerektiren birçok projede kullanılırlar.

Nikel-Kadmiyum Piller (Ni-Cd)
Nikel oksit hidroksit ve metalik kadmiyum elektrot kullanan şarj edilebilir bir pil türüdür. Ni-MH piller gibi Ni-Cd piller de tamamen deşarj olmadan şarj edilmemelidirler. Aksi takdirde aynı sorunlar meydana gelecektir. Ni-Cd piller eski teknolojide sıkça kullanılsalar da günümüzde yerlerini Ni-MH pillere bıraktıklarından dolayı çok tercih edilmezler.
-
Robotun Mekaniği
Robotumuzun ana bileşenlerini kontrolcü, sensörler, motorlar ve piller oluşturuyor. Tüm bu elektronik aksamı organ gibi düşünebiliriz. Bu organların işlevsel olabilmesi için de bir vücuda ihtiyacı var 🙂 . Evet sırada robotun mekaniğini inceleyeceğiz.
Tasarım
Her robotun mekanik tasarımı amacına uygun şekilde olmalıdır. Kullanacağımız elektronik malzemelerin düzenekteki yerinin belirlenmesi, nasıl montaj yapılacağı buna dahildir. Ayrıca bir yarışma için robot yapıyorsak yarışma kriterlerini de düşünmeliyiz. Örneğin genellikle mini sumo robot yarışmalarında maksimum 10x10cm genişlik kuralı vardır. Böylelikle robotumuzu maksimum 10×10 luk bir gövdenin etrafında toplamamız, buna göre tasarlamamız gerekiyor.
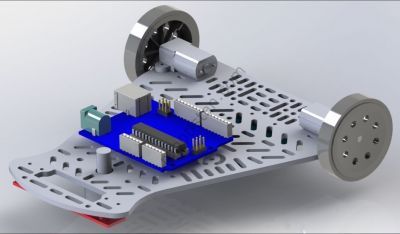
Robot gövdesi isteğe bağlı çizim programları ile (AutoCAD, SolidWorks vb.) tasarlanabilir ya da hazır robot kiti kullanılabilir. Gövde için tahta, pleksiglas, alüminyum ve benzer birçok madde kullanabiliriz. Tabi ki her maddenin dayanıklılık, ağırlık gibi fiziksel karakteristikleri robotumuzun işlevselliğini etkileyecektir.
Tasarım aşaması tamamlandıktan sonra artık montajımızı yapabiliriz.
Montaj
Robotun montajı aslında 2 kısımdan oluşuyor. Biri mekanik montaj, biri de elektronik montaj. Elektronik devre elemanlarının montajını yaparken gereken yerlerde lehimleme yönteminden, diğer bağlantılarda ise jumper kablolardan yardım alabiliriz. Mekanik montajda ise aralayıcılara, motor tutuculara ve kullanacağımız devre elemanına göre aparatlara ihtiyacımız olacaktır.

Mekanik montajda gövde boyunun yükselmesi, gövdeye ek kat çıkılması gibi işlemler için metal ve plastik aralayıcılar (yükseltme parçaları) kullanılır. Motoru gövdeye monte etmek için motor tutucular, sensörlerin işlevlerine göre de aparatlar yardımcı olurlar. Bu mekanik elemanların sağlamlığı için de civata,somun ve pullara ihtiyaç duyarız.
Elektronik montajda devre elemanlarını düzenli halde bağlamamız robotumuzu daha rahat kontrol etmemizi sağlayacaktır. Örneğin sensörümüzden kontrolcümüze giden bir kablonun koptuğunu fark edemiyorsak sorunu çözmemiz zorlaşacaktır.
-
Kablosuz Haberleşme Teknolojileri
Robotumuzun kablosuz haberleşme, veri toplama gibi özelliklere sahip olması için temel devre elemanları ve mekaniğinin dışında bir eklentiye ihtiyacı vardır. Biraz da bunlardan bahsedelim.
Bluetooth
Bluetooth modülleri 2.4-2.8 GHz ISM frekansı aralığında, kısa mesafeli haberleşmeler için kullanılırlar. BT modülleri, robotta kullanılan kontrolcüye göre farklılık gösterir. Robotumuzu bir cihaz ile kontrol etmek veya başka bir robot ile haberleşmesi amacıyla bu modülleri kullanabiliriz.

Wi-Fi
Wi-fi modülleri 2.4-5 GHz frekans aralığındadır. Bu modüller ile cihazlar arası haberleşmenin yanı sıra cihazların internet ağı ile haberleşmesi de mümkündür. Yani bu sayede bir robot internet ağından veri alabilir veya aktarabilir. Günümüzde hızla gelişen yapay zeka, makine öğrenmesi (machine learning), nesnelerin interneti (IoT) gibi teknolojiler de aslında cihaz-ağ haberleşmesi ile ortaya çıkmıştır.

Kablosuz haberleşme teknolojileri hakkında daha detaylı yazımıza buradan erişebilirsiniz.
Bir sonraki yazımızda birlikte robot uygulamaları yapmaya başlayacağız. Görüşmek üzere, takipte kalın 😉







Çok güzel begendim
Gerçekten süper bir anlatım ellerinize emeğinize sağlık