Robot kollar endüstriyel alanda insan gücünün yerini almıştır. Bir insanın taşıyamayacağı ağırlık ve büyüklükteki yükleri taşıma ve döndürme işlerini fabrikalarda robot kollar üstlenmektedir. Milimetrenin binde biri hassasiyetinde konumlandırılabilmeleri de insan elinin sergileyebileceği hassasiyetin üzerindedir. Otomobil fabrikalarının üretim videolarını izlediğinde robot kolların ne kadar hayati bir öneme sahip olduğunu göreceksin. Robot denmesinin sebebi programlanarak sonsuz tekrarla aynı işi yapabilmelerinden kaynaklanmaktadır. Kol denmesinin sebebi ise bizim kollarımız gibi eklemli bir yapıya sahip olmasından kaynaklanmaktadır. Bir robot kolun kaç farklı doğrultuda dönme ve hareket etme kabiliyeti varsa o kadar eksenli olarak ifade edilmektedir. Robot kollar alüminyum ve çeşitli metalleri oyma ve şekil verme işlerinde de kullanılmaktadır. 7 eksenli CNC Router olarak geçen bu cihazlar bir heykeltraşın çamura şekil vermesi gibi metallere şekil verebilmektedirler.
Robot kollarda kullanılma amacına göre bir tür elektrik motoru olan step motor ve servo motorlar kullanılmaktadır. PicoBricks servo motorlarla projeler yapmanıza olanak sağlamaktadır.
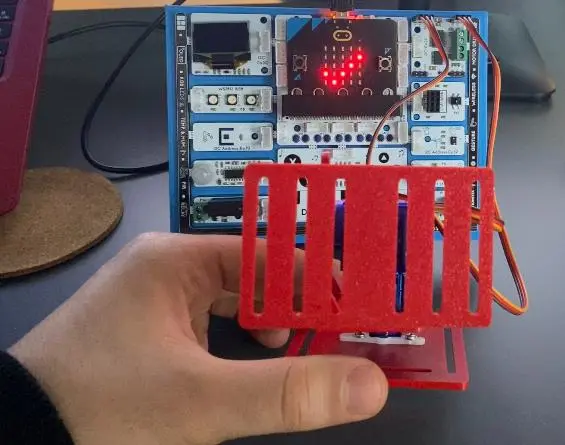
Bu projede, PicoBricks gesture modülünün aşağı-yukarı,sağ ve sol el hareketlerini algılamamızı sağlayan “gesture” özelliğini kulanarak 3D yazıcıdan baskısını aldığımız iki servo motora sahip bir pan tilt sisemini hareket ettireceğiz. Arıca Micro:Bit “A” butonuna bastığımızda servo motorları ilk konumuna getirerek sistemi ortalayacağız.
Not: Örneğin;bu sistemin ön yüzeyine RGB LED modülünü yapıştırarak iki eksene hareket edebilen bir aydınlatma sistemi yapabiliriz.
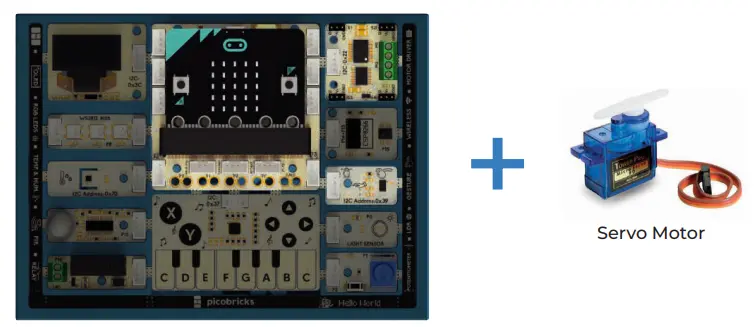
Bağlantı Şeması:
Bu projeyi kablo bağlantısı yapmadan hazırlayabilirsiniz.
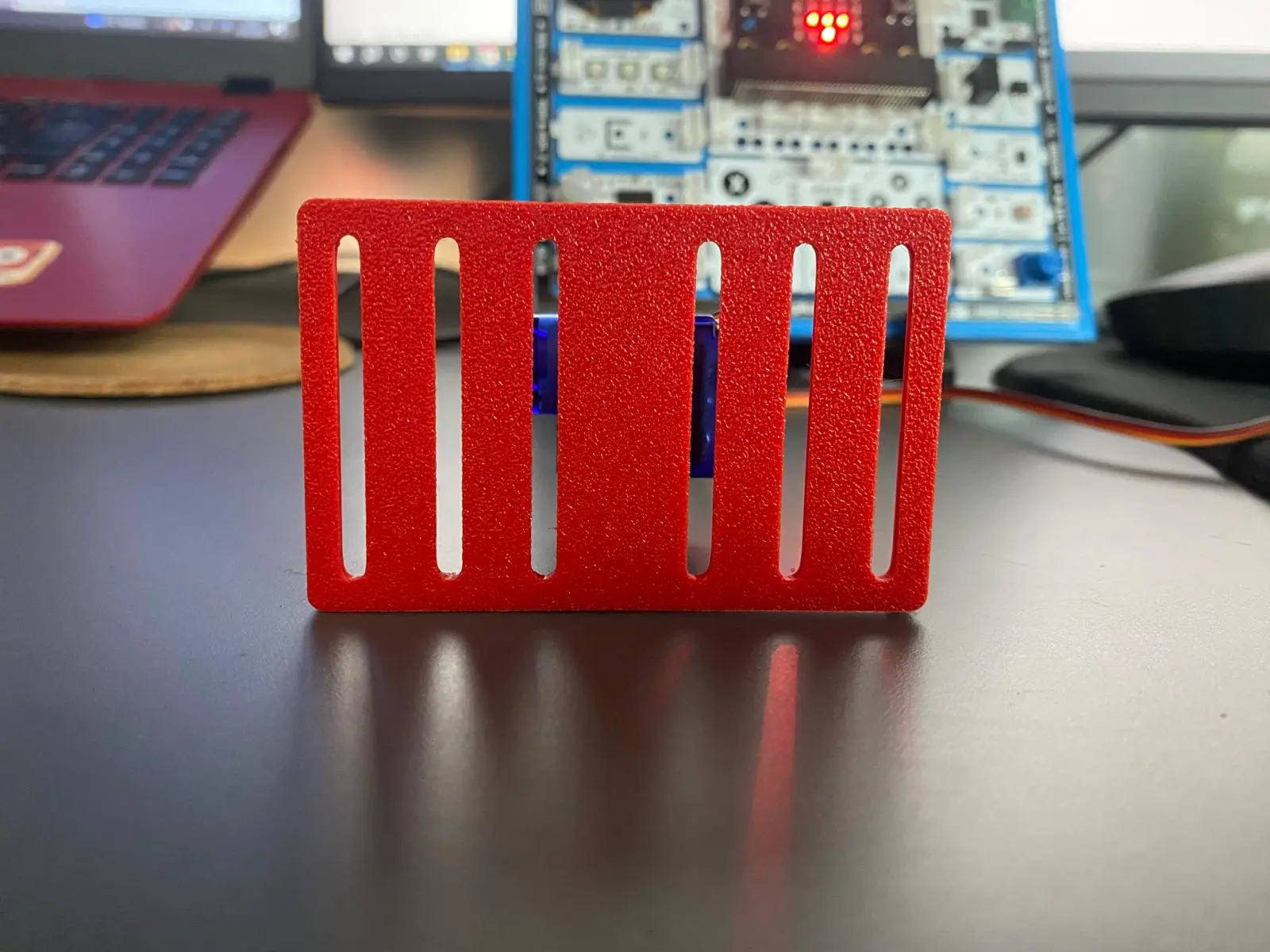
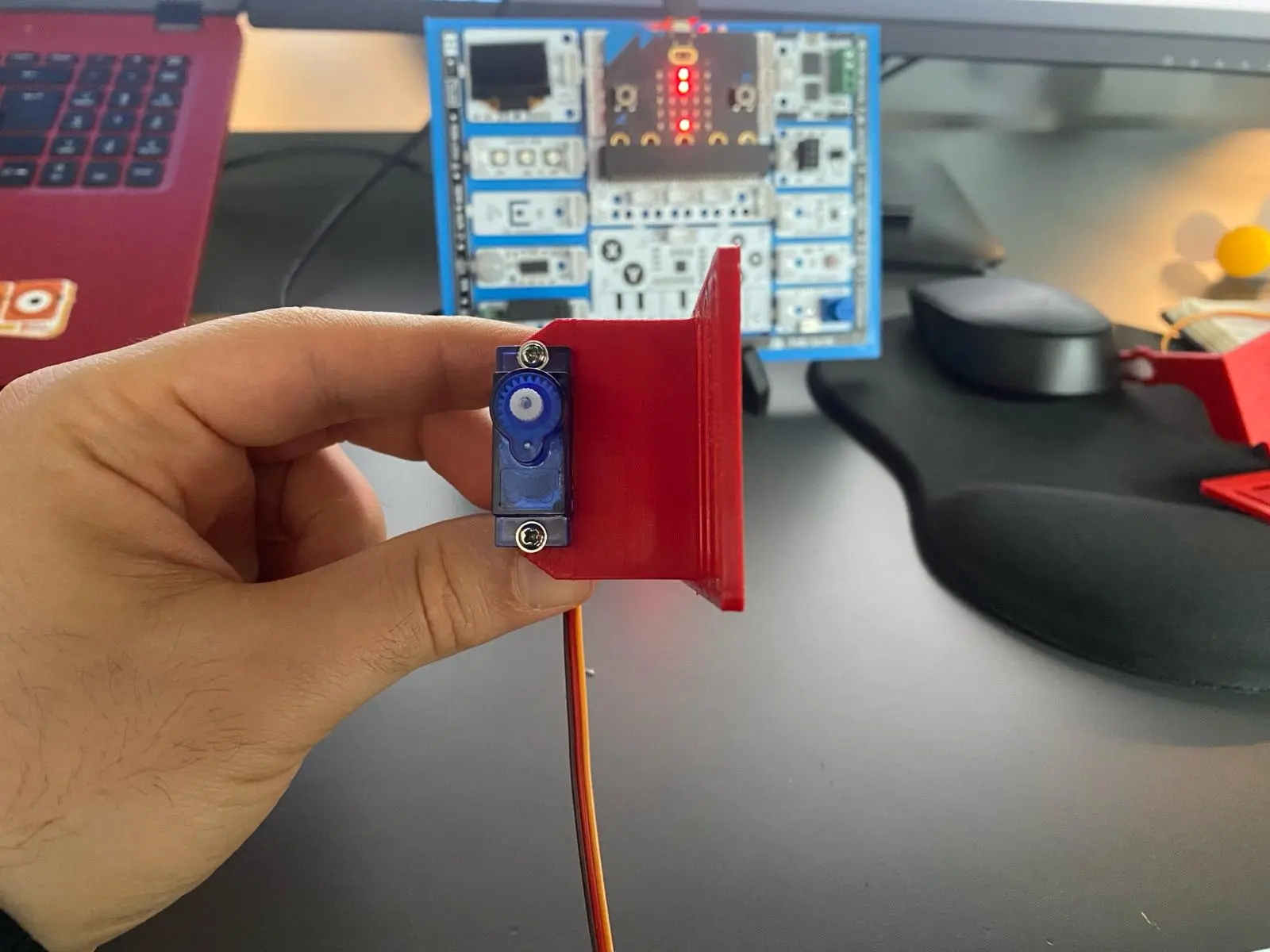
Proje Görselleri
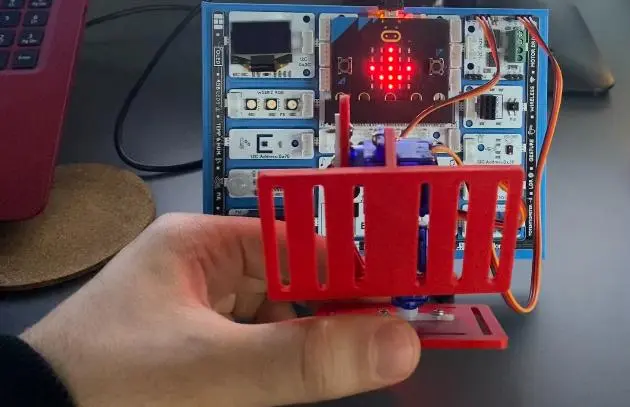
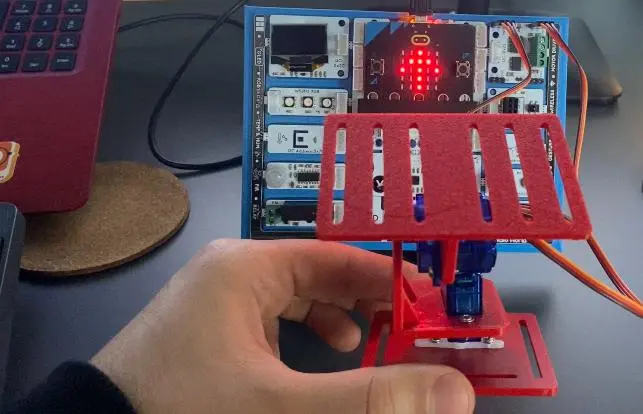
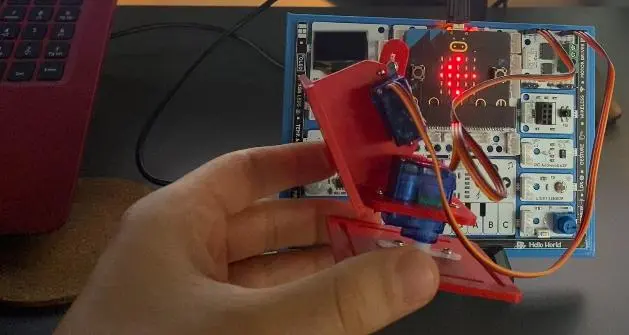
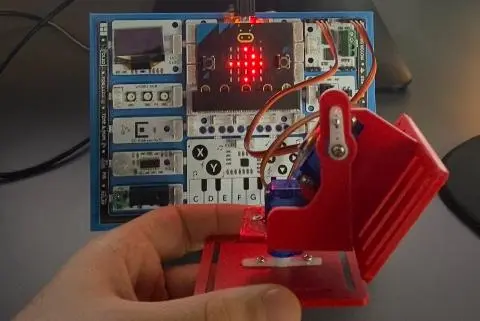
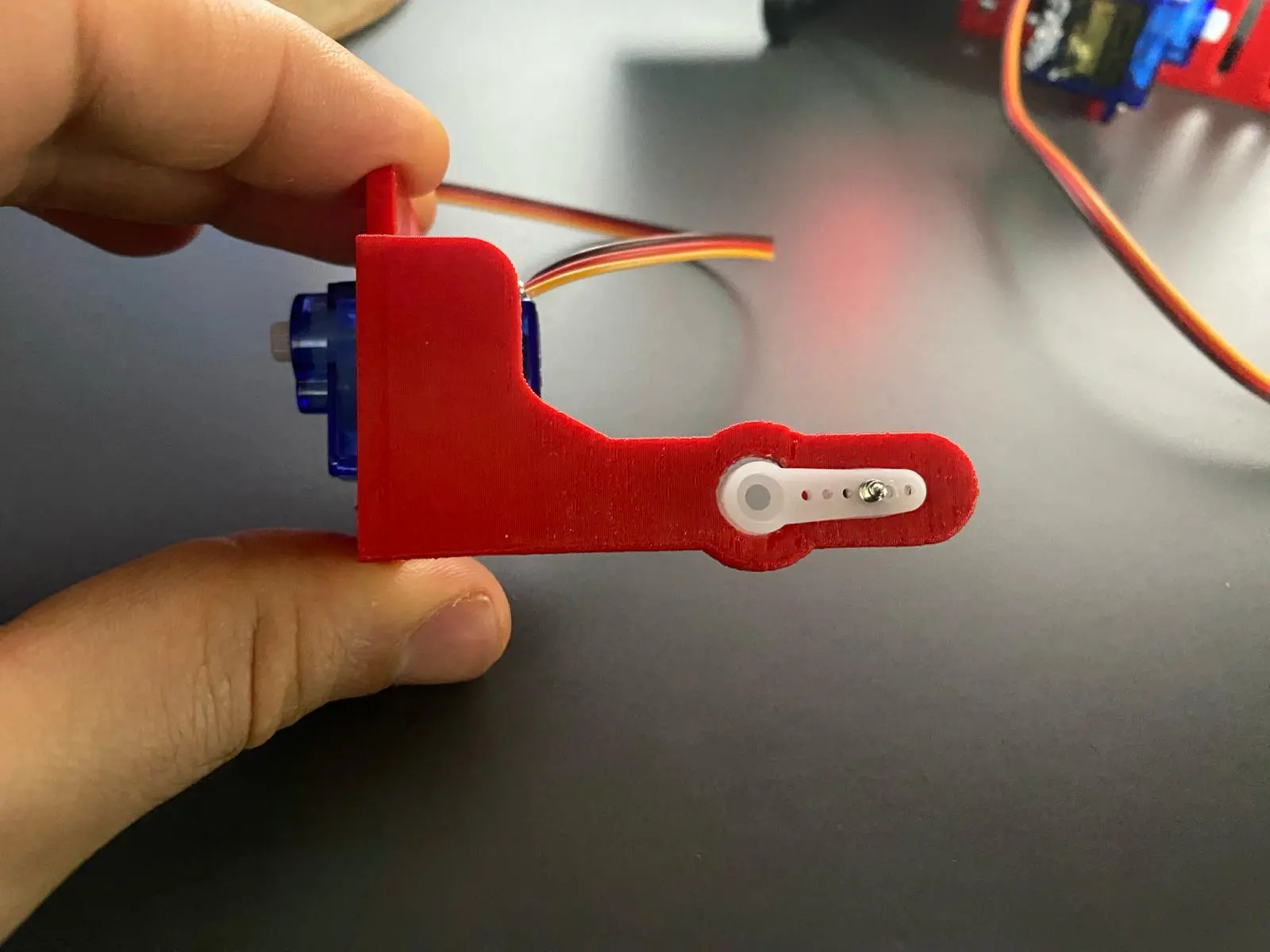
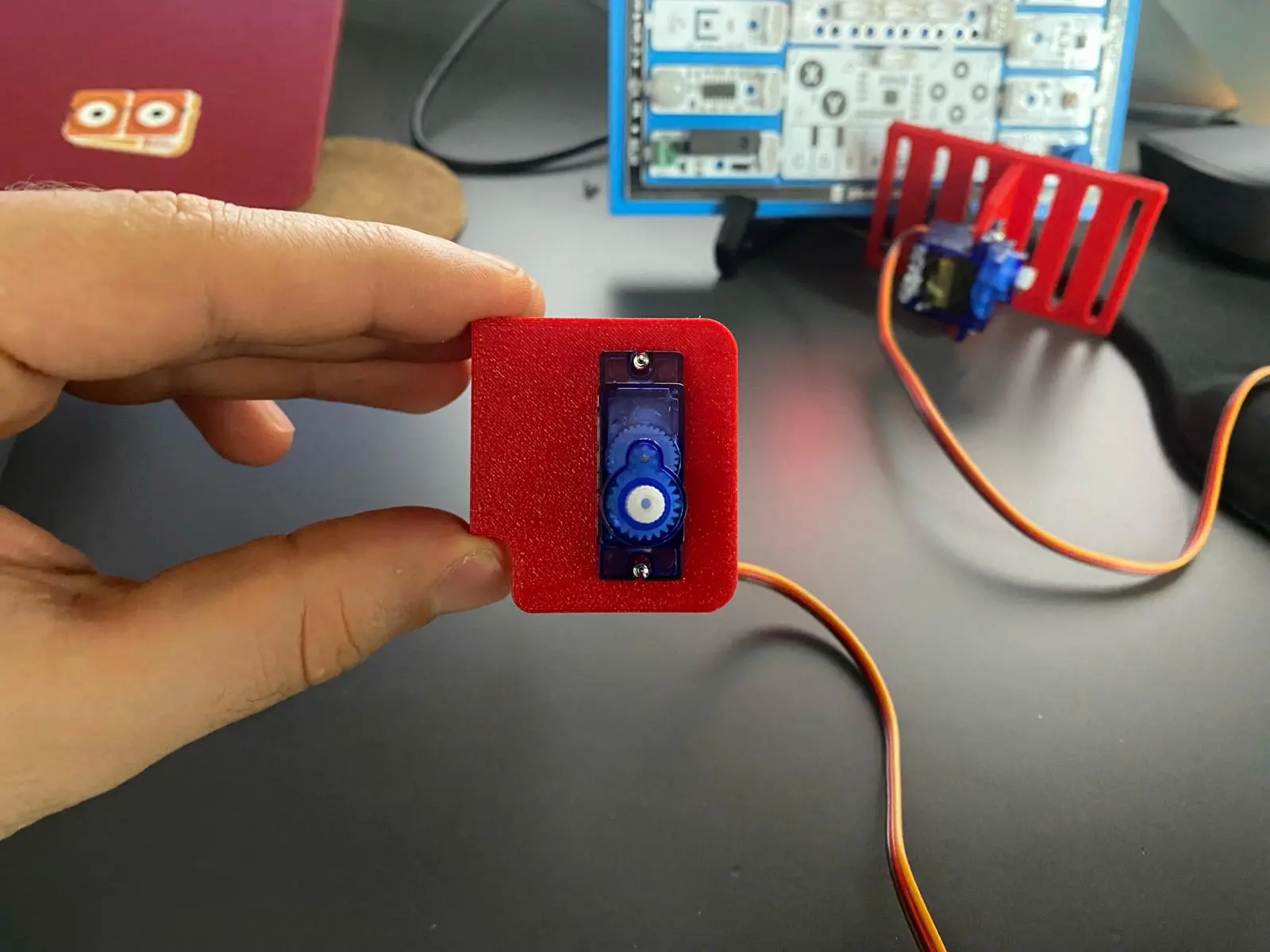
Kurulum Görselleri

Projenin STL Dosyaları
Projenin STL dosyalarına QR kodunu tarayarak veya tarayıcınızda bağlantıyı açarak erişebilirsiniz.

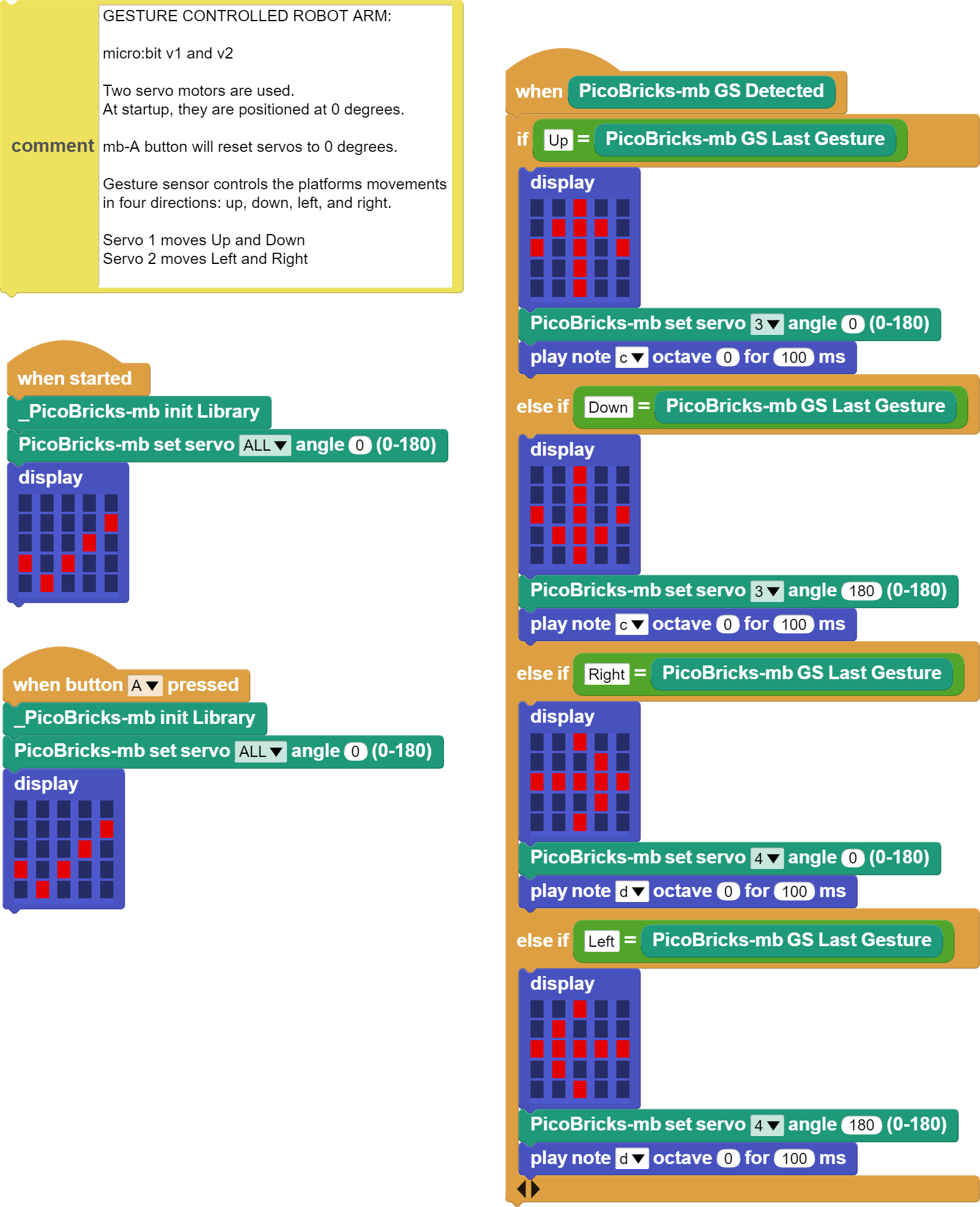
Projenin MakeCode Kodları
Projenin Python Kodları
#Gesture Controlled Arm Pantilt Project
from microbit import *
from picobricks import *
import music
# Function Initialization
apds = APDS9960()
apds.init_gesture_sensor()
motor = motordriver()
motor.servo(1,0)
motor.servo(2,0)
display.show(Image.YES)
def left_image():
display.show(Image('00900:'
'09000:'
'99999:'
'09000:'
'00900'))
def right_image():
display.show(Image('00900:'
'00090:'
'99999:'
'00090:'
'00900'))
def up_image():
display.show(Image('00900:'
'09990:'
'90909:'
'00900:'
'00900'))
def down_image():
display.show(Image('00900:'
'00900:'
'90909:'
'09990:'
'00900'))
while True:
gesture = apds.read_gesture()
if gesture=="RIGHT":
motor.servo(1,0)
right_image()
music.play(['c'])
elif gesture=="LEFT":
motor.servo(1,180)
left_image()
music.play(['c'])
elif gesture=="UP":
motor.servo(2,0)
up_image()
music.play(['c'])
elif gesture=="DOWN":
motor.servo(2,180)
down_image()
music.play(['c'])
elif button_a.is_pressed():
motor.servo(1,0)
motor.servo(2,0)
display.show(Image.YES)Projenin MicroBlocks Kodları