Radarlar, radyo dalgaları sayesinde etrafındaki cisimleri, cisimlerin hareket yönünü, cisimlerin hılzarını vb. değerlerini algılayan cihazlardır.Radarların etki alanları yani menzilleri değişiklik gösterebilir. Bu değişikliğe göre kullanım alanları değişir.Radarlar, Gemi, ucak vb. çeşitli ulaşım araçlarında ve askeri alanlarda güvenliği sağlamak amacıyla sıklıkla kullanılır.
Radarlar radyo dalgaları ile çalışıtığına göre PicoBricks üzerindeki sensörleri ya da set içeriğideki hangi sensörleri kullanarak örnek bir radar projesi yapabiliriz biraz düşünelim. PicoBricks modülleri ve set içerisindeki sensörler arasından mesafe ölçme özelliği olan sensörler, Ultrasonik mesafe sensörü (HC-SR04) ve gesture modülüdür. Gesture modülünün ölçebildiği mesafe aralığı kısıtlı olduğu için ultrasonik mesafe sensörü bu tarz bi proje için daha uygun olacaktır.
Ultrasonik mesafe sensörleri, etrafındaki cisimleri ses dalgaları yardımıyla tespit eder. Aşağıdaki görselde anlatıldığı gibisi Trig pininden çıkan ses dalgasının Echo pinine çarpma süresi hesaplanarak karşıdaki cismin mesafesi algılanır.
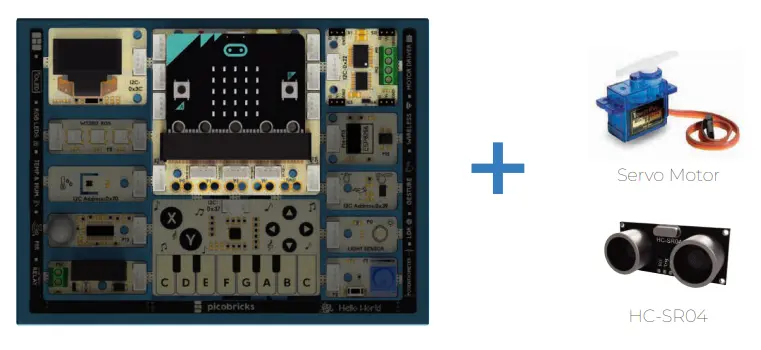
Bu projede, PicoBricks ile ultrasonik mesafe sensörü ve servo motor kullanarak radar projesi gerçekleştireceğiz.
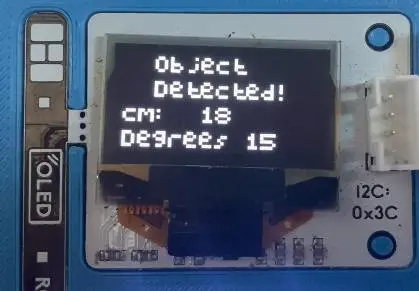
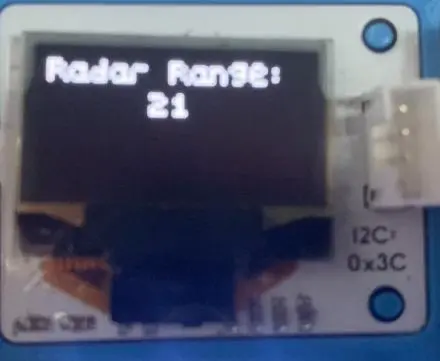
PicoBricks’in motor sürücüsüne bağlı olan servo motorun üzerine, P1-P2 pinlerine bağladığımız ultrasonik mesafe sensörünü (HC-SR04) algıladığı değere göre 0-180 derecelik açı ile döndürerek bir radar projesi gerçekleştireceğiz. Radar potansiyometre modülü ile belirlenen menzil aralığında bir değer algılayana kadar 0-180 derece aralığında hareket edecektir. Eğer ki belirlenen menzil aralığında bir cisim algılarsa hareket duracak, buzzerdan uyarı sesi çalacak ve OLED ekranda; cismin uzaklığı ve radara olan açısı yazacaktır.
Bağlantı Şeması:
Bu projeyi PicoBricks Modüllerini uygun noktalardan kırarak hazırlayabilirsiniz.
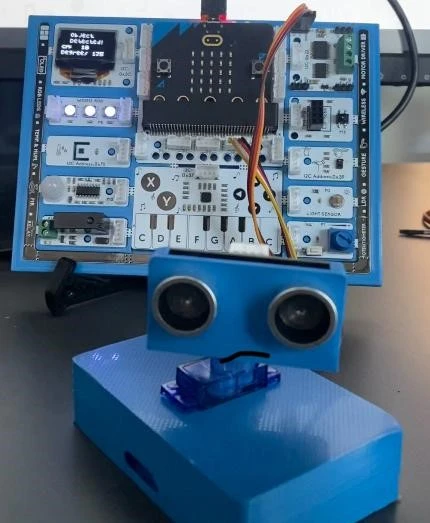
Proje Görselleri

Projenin STL Dosyaları
Projenin STL dosyalarına QR kodunu tarayarak veya tarayıcınızda bağlantıyı açarak erişebilirsiniz.

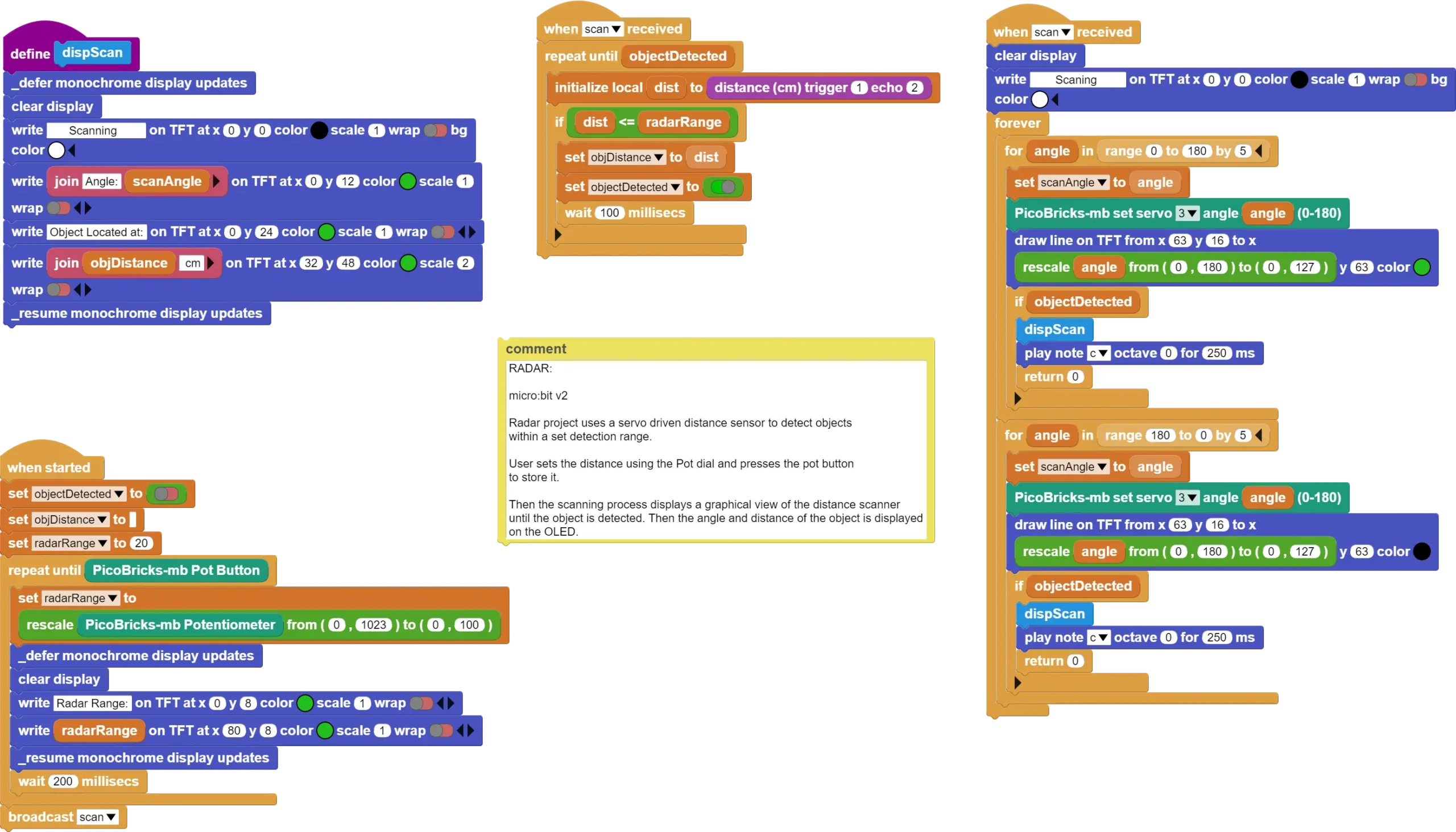
Projenin MakeCode Kodları
Projenin Python Kodları
#PicoBricks Radar Project
from microbit import *
from picobricks import *
import music
# Pin Initialization
Button_Pin = pin2
Pot_Pin = pin1
# Function Initialization
oled = SSD1306()
oled.init()
motor = motordriver()
motor.servo(1,90)
angleServo=0
radarRange=0
c=1
button = Button_Pin.read_digital()
while Button_Pin.read_digital()==0:
oled.clear()
pot = Pot_Pin.read_analog()
radarRange=round(round( pot - 0 ) * ( 100 - 0 ) / ( 1023 - 0 ) + 0)
oled.add_text(0,0,"Radar Range:")
oled.add_text(5,1,str(radarRange))
sleep(50)
oled.clear()
while True:
oled.clear()
distance = measure_distance()
while round(measure_distance())>= radarRange:
oled.add_text(2,2,"Scaning...")
motor.servo(1,angleServo)
if c==1:
angleServo=angleServo+5
if c==0:
angleServo=angleServo-5
if angleServo==180:
c=0
if angleServo==0:
c=1
sleep(10)
oled.clear()
objectDistance=round(distance)
oled.add_text(2,0,"Object")
oled.add_text(2,1,"Detected!")
oled.add_text(0,2,"cm:")
oled.add_text(5,2,str(objectDistance))
oled.add_text(0,3,"Degreess")
oled.add_text(8,3,str(angleServo))
music.play(['c'])Projenin MicroBlocks Kodları