Takım üyelerinden bir kişinin ya da mentörün mail adresi ile Tinkercad ‘e kaydolun. Kayıt adımlarını tamamladıktan sonra oluştur butonundan yeni bir 3D tasarım projesi oluşturun.

Projenizi oluşturduktan sonra sağ taraftaki şekilleri ve Tinkercad araçlarını kullanarak takım olarak belirlediğiniz robotun 3D tasarımını oluşturmaya başlayınız.

Demo Görev için Robotistan maskotunu oluşturabilirsiniz.

https://www.tinkercad.com/things/17OVEFuJ4E7-robotistan3d
Robotumuzu oluşturduğumuza göre artık robotumuzun devresini oluşturabiliriz. İlk olarak Tinkercad’de bir devre projesi oluşturalım.

Devre projenizi oluşturduktan sonra, devre kurmaya başlamadan önce robotunuzda kullanacağınız mikro denetleyiciyi ve sensörleri takım arkadaşlarınız ile beraber belirleyiniz.
Demo Görevde Kullanılacak Mikrodenetleyici: Arduino UNO R3
Demo Görevde Kullanılacak Sensörler:
Breadboard
4x Micro Servo
1x Mesafe Sensörü
9V Pil
Mikrodenetkeyici ve diğer sensörleri proje sayfanıza eklemek için ve bağlantıları gerçekleştirmek için sağ taraftaki Tinkercad araçlarını kullanabilirsiniz.
Bağlantı elemanları (Kablo) için ekranın üstündeki Tinkercad araçlarını kullanabilirsiniz.

Demo görevde, robotumuzun hareket mekanizması için kollara 2 adet ve bacaklara 2 adet olmak üzere 4 adet servo motor, gözleri için mesafe sensörü robotumuzun bilgisayara bağlı olmadan enerji alması için 1 adet 9V Pil ve bütün bağlantıları yapabilmek için 1 adet breadboard kullanacağız. Bu devre elemanlarını proje sayfamıza sürükledikten sonra aşağıdaki gibi devremizi kuralım.
Bağlantılar:

Devremizide oluşturduğumuza göre artık robotumuz için kod yazma adımlarına geçiş yapabiliriz. Bu aşamada ilk olarak kodunuzu yazacağınız programlama dilini daha sonra kodu hangi editörde yazacağınızı belirlemeniz gerekmektedir.
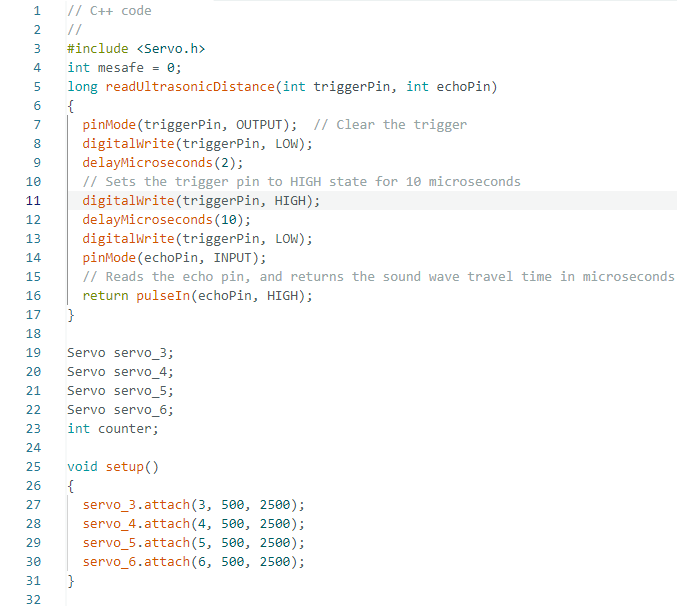
Demo görev için kodu Tinkercad ‘deki kod alanında yazacağız ve C++ programlama dilini kullanacağız.
Koda başlamadan önce robotumuzun için bir çalışma senaryosu belirlememiz gerekmektedir. Demo görev için robotumuzun çalışma senaryosu;
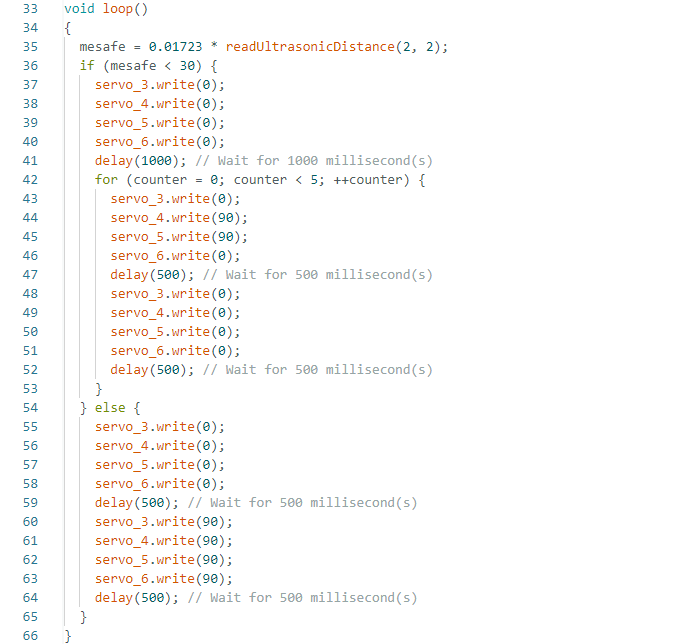
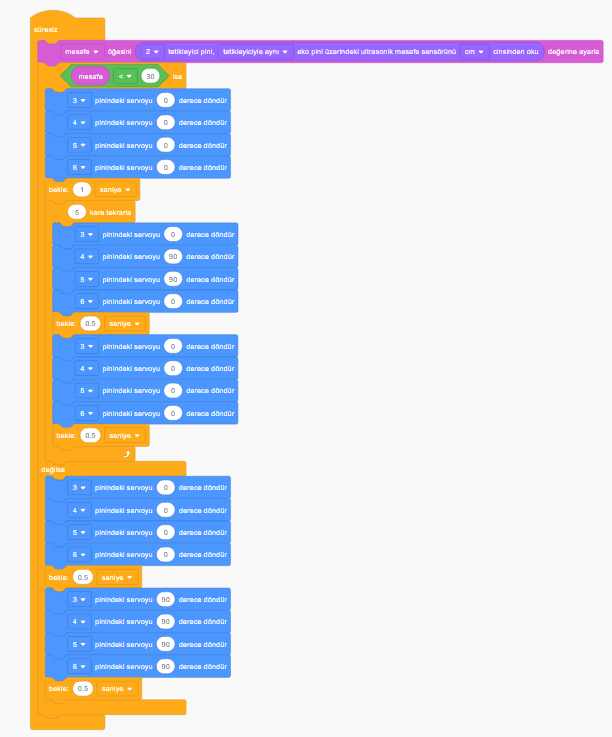
Robotumuzda kullandığımız Servoların kol ve bacaklar için konumlandırması aşağıdaki gibidir. Robotumuz mesafe 30 cm den küçükse hep ileri hereket eder ancak 30 önünde bir cisim algılarsa durur. Daha sonra sola döner. Bu işlemi enerji kesilene kadar devam ettirir. Bu şekilde engellerden kaçmış olur.
Robotun ileri hareket etmesi için sağ kol sağ ayak 0 dereceden 90 dereceye aynı anda gelmeli yarım saniye sonra sol kol ve sol ayak 0 dereceden 90 dereceye gelmeli ve bunu engel algılanana kadar devam ettirmeli.
Robotun durması için bütün servo motorların durması gerekmekli.
Robotun sola dönmesi için sol ayağın durması ve sağ ayağın 0 dan 90 dereceye 2 saniye hareket etmesi gerekir.
Robotun sağa dönmesi için sağ ayağın durması ve sol ayağın 0 dan 90 dereceye 2 saniye hareket etmesi gerekir.
Sağ Kol: Servo 2
Sol Kol: Servo 3
Sağ Ayak: Servo 4
Sol Ayak: Servo 1
Senaryomuzu ve hareket kombinasyonlarımızı oluşturduğumuza göre kodumuzu oluşturmaya başlayabiliriz. Tinkercadde kod yazmak için sağ taraftaki Kod butonuna tıklayabilirsiniz.

Kod alanını açtıktan sonra Blok, Metin, Blok+Metin seçeneklerini seçebilirsiniz. Demo görev için Blok + Metin seçeneğini kullanacağız. Blok+Metin seçeneğinde oluşturduğunuz blok kodların, metin çıktısı otomatik olarak oluşmaktadır.

Kodumuzuda oluşturduğumuza göre Tinkercad adımlarını tamamladık demektir. Tinkercad de yapmamız gereken son işlem. 3D tasarımımızı png olarak kaydederek Scratch aktarmak. Bunun için 3D tasarımızın olduğu Tinkercad projesine tekrar girelim.
Mouse ya da sol üst köşede eksen aracıyla robotumuzun açısını belirleyelim.

Sağ taraftaki “Gönder” butonuna tıklayalım.

Açılan pencereden “Tasarımınızın resmi” alanından png dosyasını bilgisayarınıza indirin.

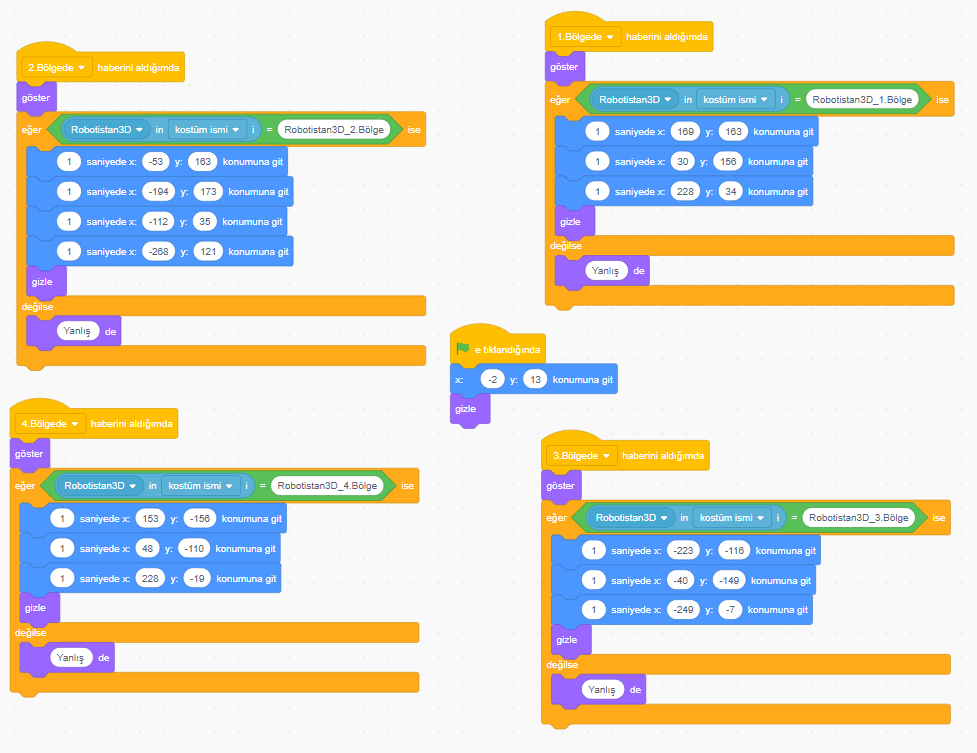
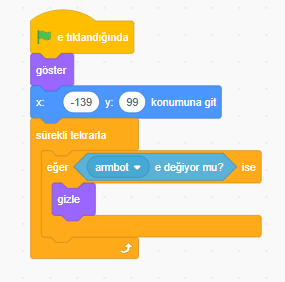
Tinkercad adımlarını tamamladık şimdi Scratch ‘e geçiş yapabiliriz.
 (Görseli tam ekran görüntülemek için lütfen görselin üzerine tıklayınız)
(Görseli tam ekran görüntülemek için lütfen görselin üzerine tıklayınız)