Tanklar, paletli yapıları sayesinde engebeli arazilerde rahat hareket edebilen araçlardır.Paletler ise birden fazla sıralı çark ya da teker ile bunların çevresini saran bir kayıştan oluşur.
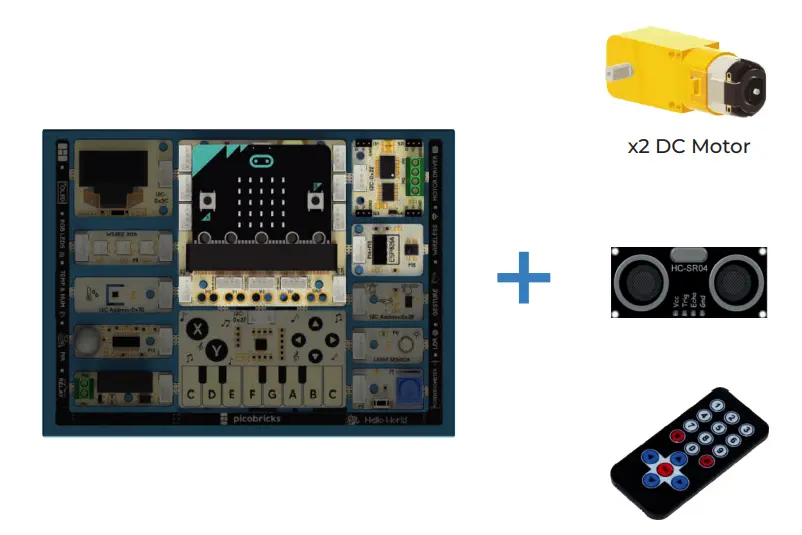
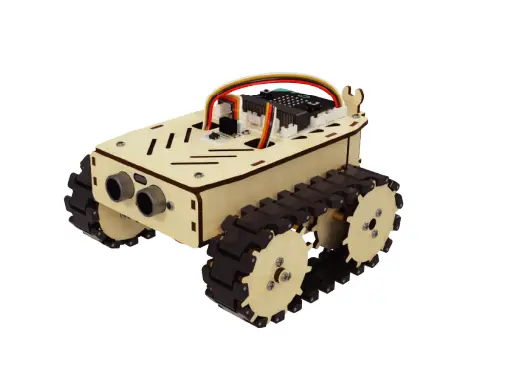
PicoBricks Robot Car, iki DC motor ve palet platformu kullanan ahşap proje kitidir. Üzerinde bulunan IR alıcı sayesinde kumanda ile uzaktan kontrol edebildiğimiz robot car önündeki mesafe sensörü sayesinde etrafındaki cisimleri algılayarak hareketlerine karar verebilir.
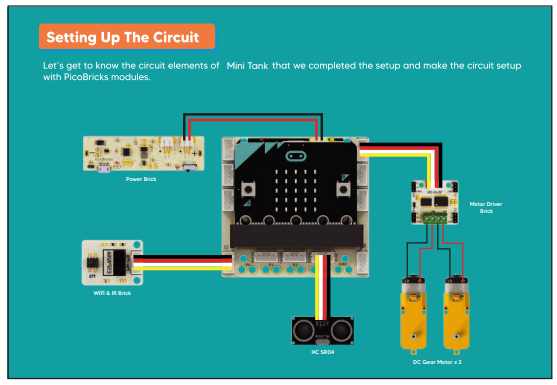
Bu projede, PicoBricks wireless modülü üzerindeki IR alıcı’yı IR verici kumanda ile kullanarak. Motor sürücü modülüne bağlanan iki DC motoru kontrol edeceğiz. DC motor kontrollerimiz sayesinde robot gideceği yöne karar verecek. Aynı zamanda robot car kitinin üzerindeki HCSR sensörü sayesinde 15 cm yakınında mesafe algılanırsa robot duracak.
Bağlantı Şeması:
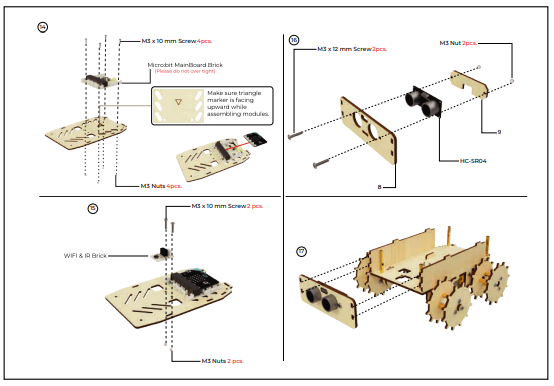
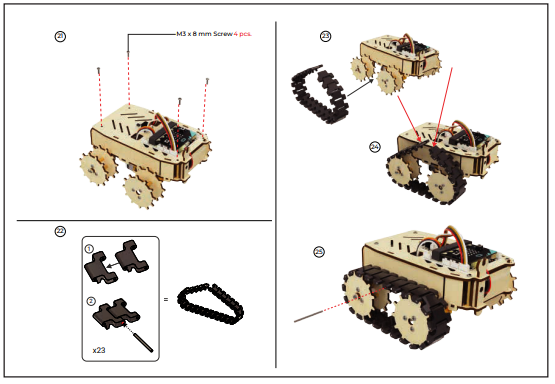
Bu projeyi PicoBricks Modüllerini uygun noktalardan kırarak hazırlayabilirsiniz.
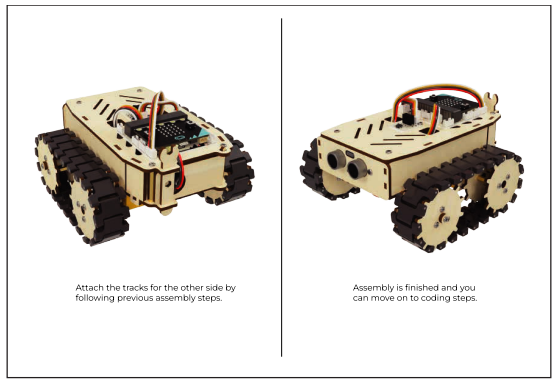
Proje Görselleri

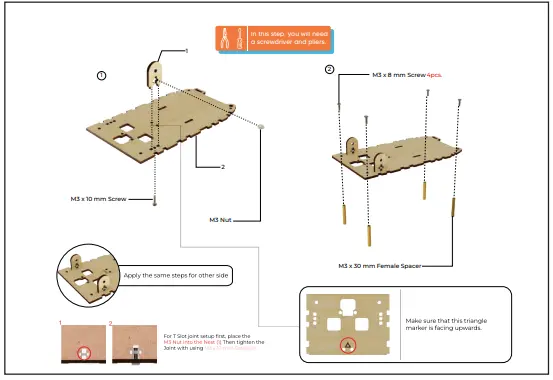
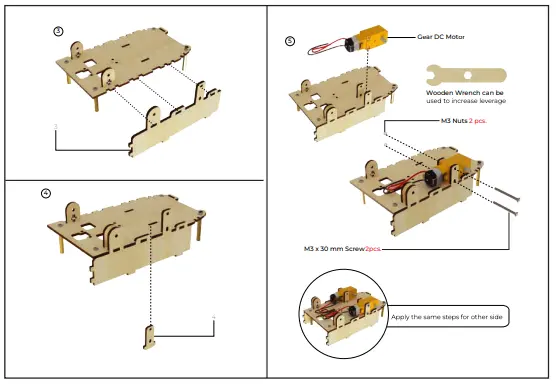
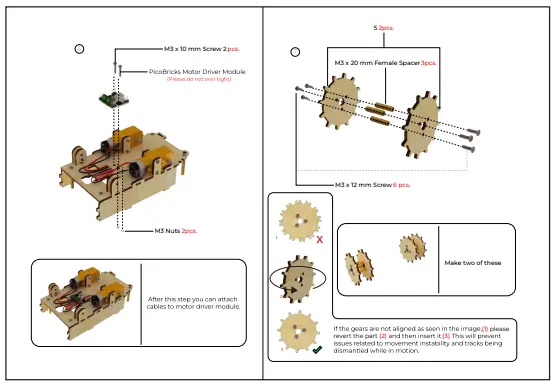
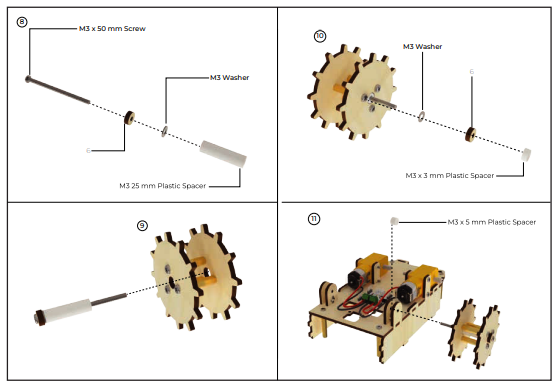
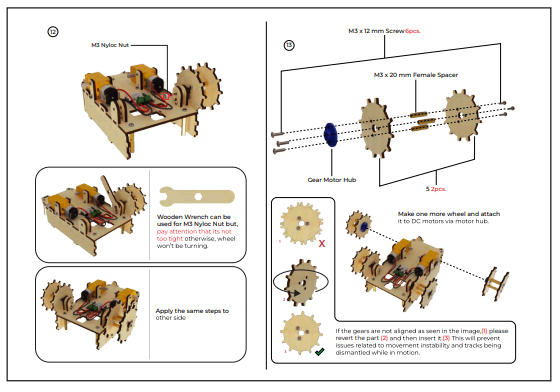
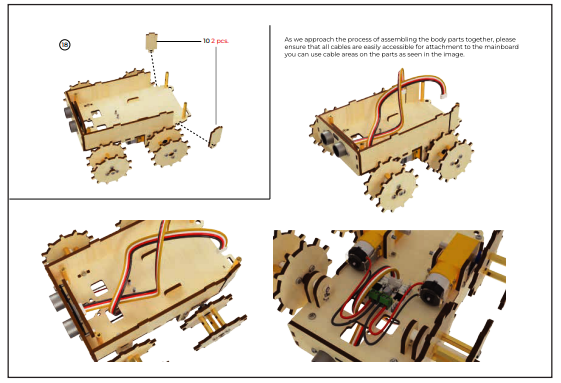
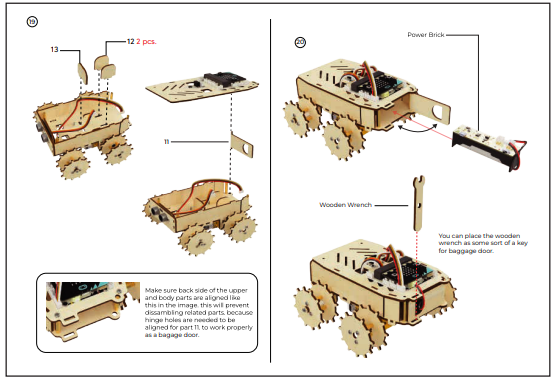
Proje Kurulum Adımları
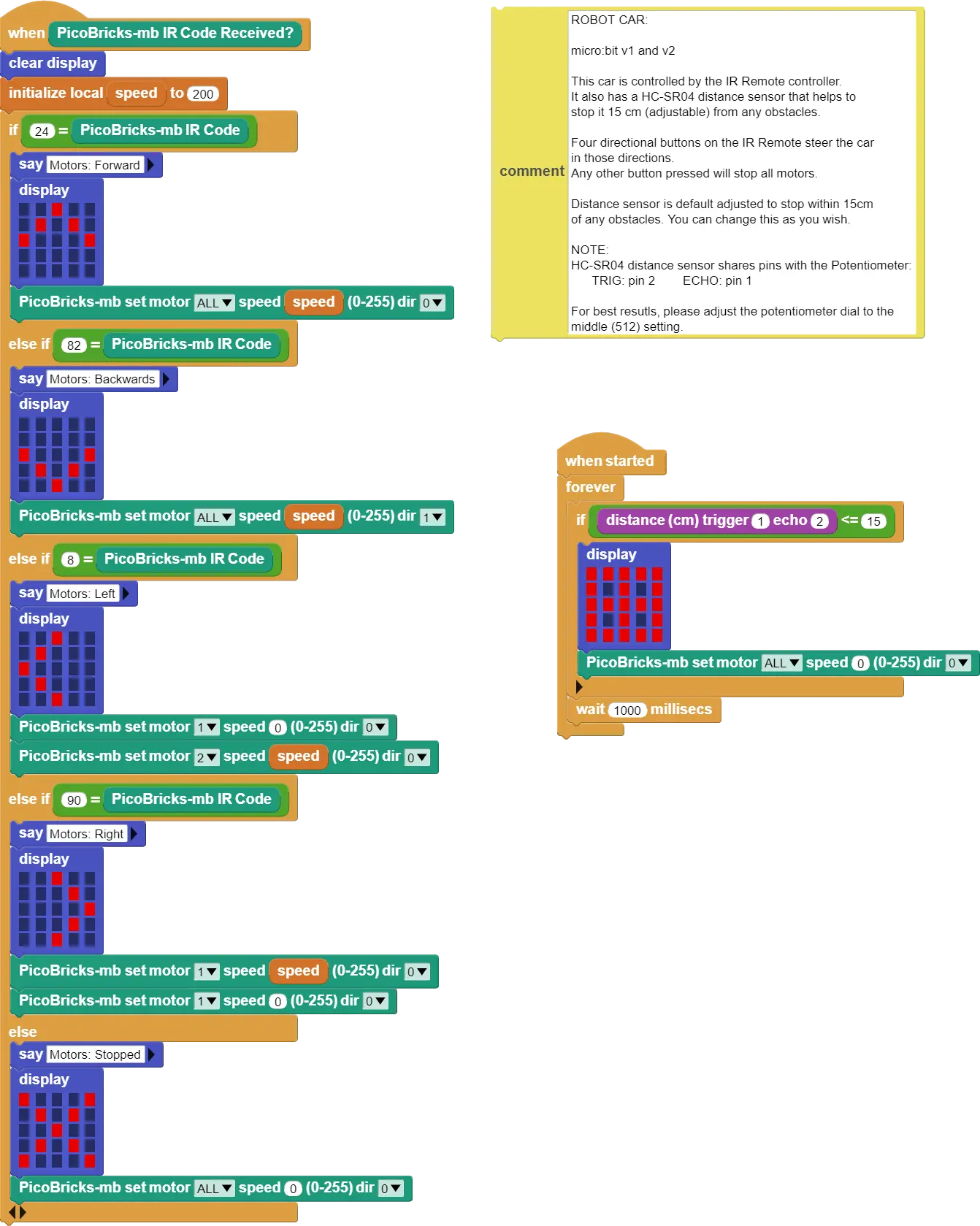
Projenin MakeCode Kodları
Projenin Python Kodları
#Mars Explorer Project
from microbit import *
from picobricks import *
# Function Initialization
motor = motordriver()
pin15.set_pull(pin15.PULL_UP)
ir = IRM()
motor.dc(1,0,1)
motor.dc(2,0,1)
def forward():
motor.dc(1,255,1)
motor.dc(2,255,1)
def backward():
motor.dc(1,255,0)
motor.dc(2,255,0)
def left():
motor.dc(1,0,1)
motor.dc(2,255,1)
def right():
motor.dc(1,255,1)
motor.dc(2,0,1)
def stop():
motor.dc(1,0,1)
motor.dc(2,0,1)
def left_image():
display.show(Image('00900:'
'09000:'
'99999:'
'09000:'
'00900'))
def right_image():
display.show(Image('00900:'
'00090:'
'99999:'
'00090:'
'00900'))
def up_image():
display.show(Image('00900:'
'09990:'
'90909:'
'00900:'
'00900'))
def down_image():
display.show(Image('00900:'
'00900:'
'90909:'
'09990:'
'00900'))
while True:
distance = measure_distance()
#print(distance)
key=ir.get(pin15)
if(key!=-1):
print(key)
if key == 24:
if distance<=15:
stop()
else:
forward()
down_image()
elif key == 90:
right()
right_image()
elif key == 8:
left()
left_image()
elif key == 82:
backward()
up_image()
#sleep(100)
else:
stop()
print(key)
display.show(Image.HAPPY)Projenin MicroBlocks Kodları