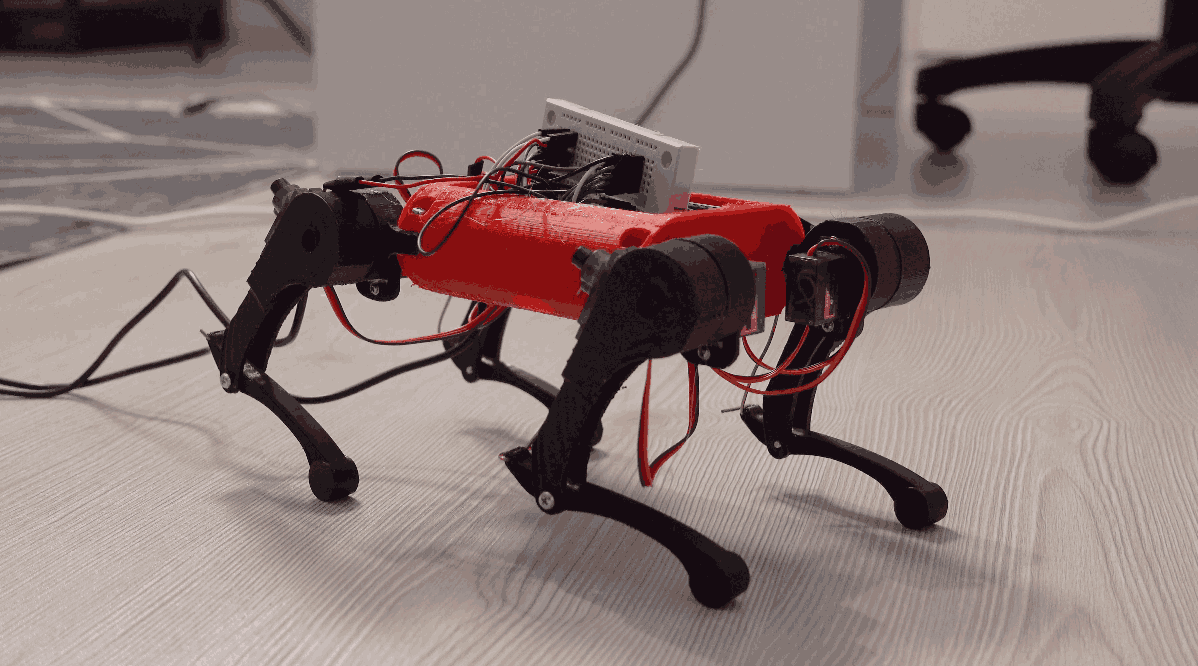
Selam makerlar. Eşyalarınızı taşıyabilen ve aynı zamanda sizi takip edebilen bir robot köpek fikri sizi de heyecanlandırıyor mu? Bu yazımızda, Arduino ile yapılan robot köpek projesini adım adım anlatacağız. Robot köpek, Arduino platformu ve çeşitli elektronik bileşenler kullanılarak gerçekleştirilen bir projedir. Bu robot köpek, basit komutlara uyabilir, nesneleri taşıyabilir ve hatta şınav çekebilir! Gelin, detaylara birlikte göz atalım.
İlk olarak projemiz için gerekli malzemeleri tanıtacağız. Köpek robotu için uygun bir model bulup 3D yazıcıdan çıktısını aldıktan sonra montaj aşamasına geçeceğiz. Montaj aşaması tamamlandıktan sonra servoları test etmek için Arduino UNO kullanarak servoların konumlarını ayarlayıp test edeceğiz. Bu aşamadan sonra robotun nasıl hareket edeceğini ve hangi komutlara uyacağını belirleyen kodları yazıyoruz. Kodlama tamamlandıktan sonra köpek robotumuz hazır! Hadi hemen gerekli malzemelere inceleyelim.
Robot Köpek Projesi için Gerekli Malzemeler
- MG90S Servo Motor – 8 adet
- 18650 3.7 V 2600mAh Li-ion Şarjlı Pil – Kutup Başlı – 4 adet
- 18650 Tekli Pil Yuvası (PCB Tip) – Pil Yatağı – 4 adet
- 40 Pin Ayrılabilen Dişi-Erkek M-F Jumper Kablo-200 mm – 1 adet
- HC06 Bluetooth-Serial Modül Kartı – 1adet
- NodeMCU V3 ESP8266 ESP-12E Geliştirme Kartı – CH340 – 1 adet
- LM2596 Mini Ayarlanabilir Voltaj Regülatör Kartı 3A – 2 adet
- BB-301 Orta Boy Breadboard – 1adet
- 5V 3A Adaptör – 2 adet
Robot Köpek Devre Şeması
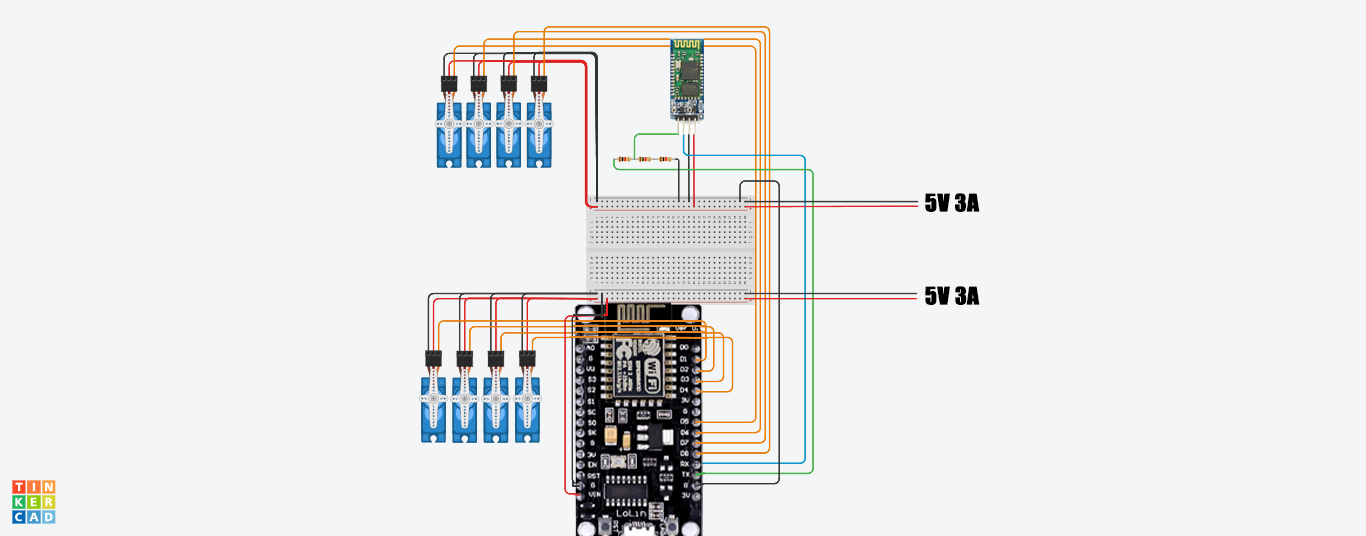
Devre tamamlandıktan sonra, robot köpeğimizin hareketlerini ve işlevlerini kontrol etmek için kodlama aşamasına geçiyoruz. Robot köpeğin nasıl yürüyeceğini, komutlara nasıl tepki vereceğini ve daha fazlasını belirleyen kodları yazacağız.
3D Parçalar
Robot Köpek projenizi hayata geçirmek için gerekli olan STL dosyalarını aşağıdaki bağlantıya tıklayarak bilgisayarınıza indirebilirsiniz.
Robot Köpek STL dosyaları
Robot Köpek Proje Kodları
#include <Servo.h>
Servo sag_arka_ust;
Servo sag_arka_alt;
Servo sol_arka_ust;
Servo sol_arka_alt;
Servo sag_on_ust;
Servo sag_on_alt;
Servo sol_on_ust;
Servo sol_on_alt;
char veri;
void setup() {
sag_arka_ust.attach(13);
sag_arka_alt.attach(15);
sol_arka_ust.attach(12);
sol_arka_alt.attach(14);
sag_on_ust.attach(0);
sag_on_alt.attach(2);
sol_on_ust.attach(5);
sol_on_alt.attach(4);
Serial.begin(9600);
delay(2000);
}
void loop()
{
if(Serial.available()>0)
{
veri = Serial.read();
if(veri=='h')
{
idle();
}
else if(veri == 'c')
{
ileri();
}
else if(veri == 'j')
{
sinav_cek();
}
}
}
void idle()
{
sol_arka_ust.write(90);
sol_arka_alt.write(90);
sag_arka_ust.write(90);
sag_arka_alt.write(70);
sag_on_ust.write(120);
sag_on_alt.write(90);
sol_on_ust.write(60);
sol_on_alt.write(90);
}
void sinav_cek()
{
sol_arka_ust.write(90);
sol_arka_alt.write(90);
sag_arka_ust.write(90);
sag_arka_alt.write(70);
sag_on_ust.write(120);
sag_on_alt.write(90);
sol_on_ust.write(60);
sol_on_alt.write(90);
delay(500);
sol_arka_alt.write(40);
sag_arka_alt.write(110);
sag_on_alt.write(140);
sol_on_alt.write(40);
delay(500);
}
void ileri()
{
sol_arka_ust.write(90);
sag_arka_ust.write(40);
sag_on_ust.write(120);
sol_on_ust.write(110);
delay(100);
sol_arka_alt.write(90);
sag_arka_alt.write(120);
sag_on_alt.write(90);
sol_on_alt.write(40);
delay(100);
sol_arka_ust.write(140);
sag_arka_ust.write(90);
sag_on_ust.write(70);
sol_on_ust.write(60);
delay(100);
sol_arka_alt.write(40);
sag_arka_alt.write(70);
sag_on_alt.write(140);
sol_on_alt.write(90);
delay(100);
}
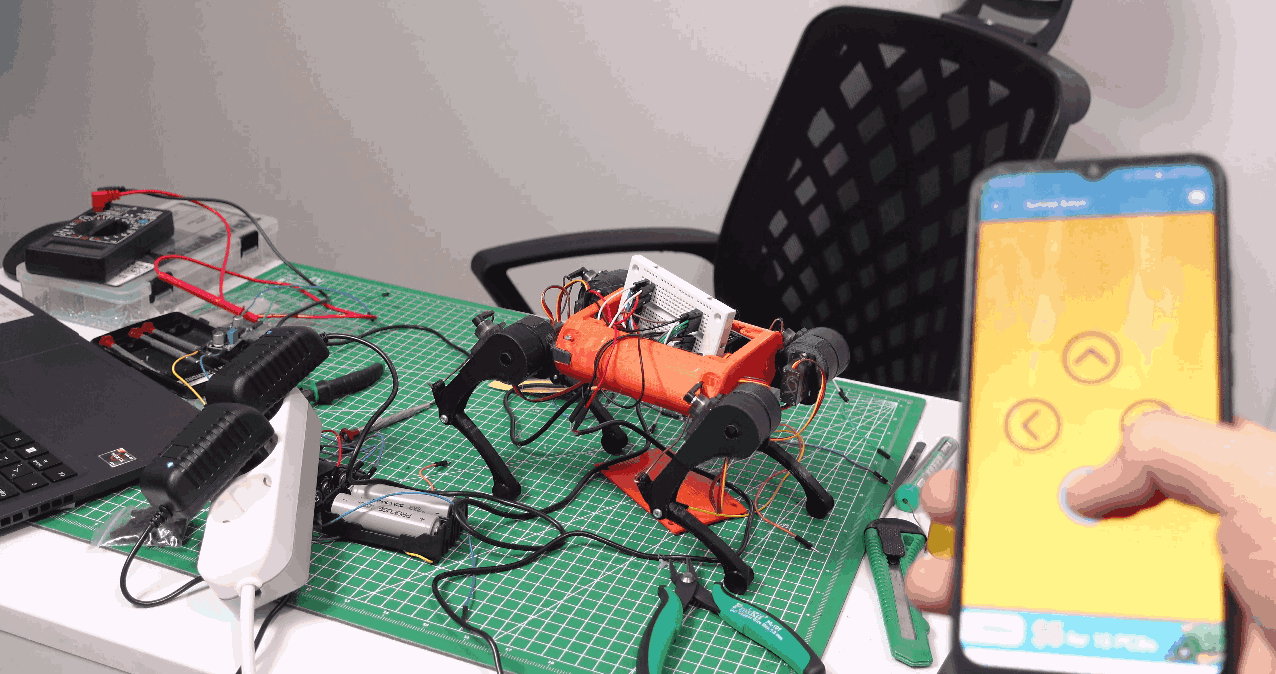
Robot Köpek Proje Videosu
Bu yazımızda, kendi robot köpeğinizi nasıl yapabileceğinizi anlattık. Bir sonraki yazımızda görüşmek üzere!







Robot köpeğin 3D kodları öğrenebilir miyim
merhabalar acaba bu projenın STL dosyalarını nerden nasıl bulabılırım?
merhaba köpeğin ayak kısımları 3d yazıcımız yok siz bunun satışını yapıyor musnuz bir de gövde kısmı. almak istiyorum lakin ayakları ve gövdesi malzeme listesinde yok nasıl alabiliriz bilmiyoruz yardımcı olur musnuz ?