Merhaba arkadaşlar. Bu yazımızda “Sumo Robot nedir, nasıl yapılır?” konularından bahsedeceğiz.
Sumo Robot Nedir?
Sumo ismi Japonya’nın geleneksel güreşi olan Sumo güreşinden gelmektedir. Sumo Robot, otonom olarak başka bir robotla mücadele etme amacında olan robot tipidir. Müsabakalar “dohyo” adı verilen yuvarlak bir sahada gerçekleşir. Dohyo’nun dışına çıkan robot yarışmayı kaybeder.
Yarışmalarda boyut ve ağırlıklarına göre ayrılan kategoriler vardır :

Biz bu yazımızda bir sumo robot projesi yaparken nelere ihtiyaç duyulduğunu ve çalışma mantığını aktarmaya çalışacağız. Uygulamamızdaki robot herhangi bir yarışma için tasarlanmamış olup sadece öğretici içerik niteliğindedir.
Arduino ile Mini Sumo Robot Yapımı
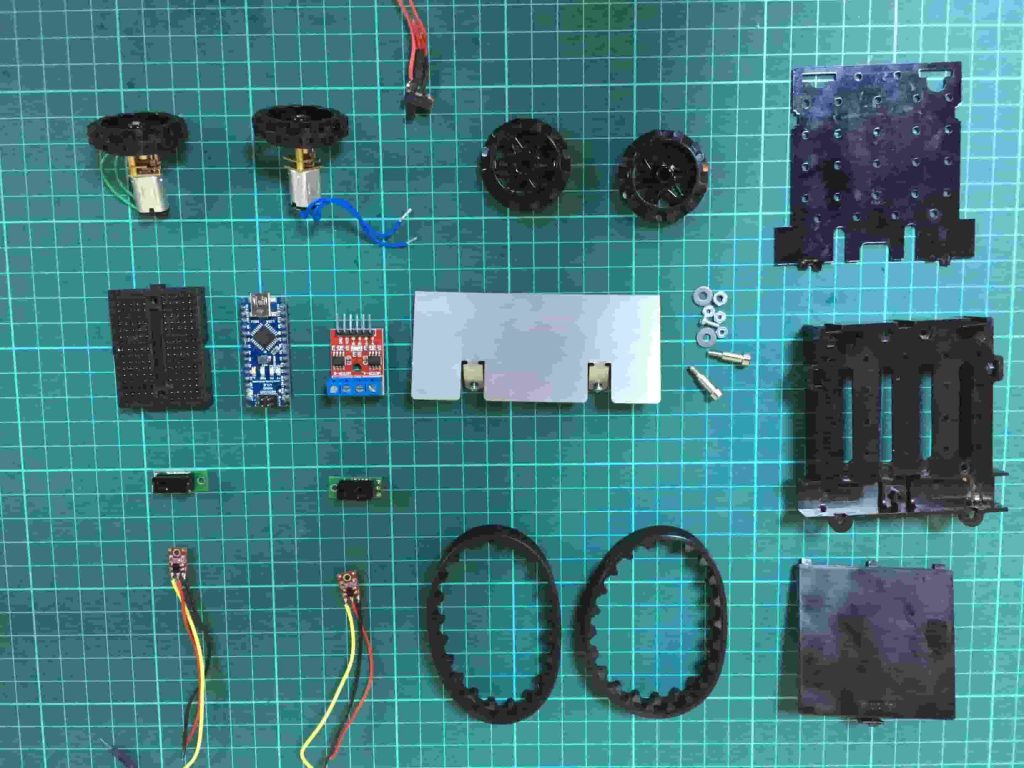
Sumo Robot Malzemeleri
- Arduino Nano
- Zumo – Paletli Mini Sumo Robot Gövdesi
- Zumo Blade – Mini Sumo Robot Kızağı
- 2 x 6 V 500 RPM Redüktörlü Mikro DC Motor
- L9110 Motor Sürücü Kartı
- QTR-1A Kızılötesi Sensör Çifti
- 2 x Sharp GP2Y0D815Z0F Kızılötesi Sensör 15 cm – PL-2465
- Breadboard
- Pil ( Alkalin piller robotu yaklaşık 15 dk. verimli şekilde çalıştıracaktır. Li-Po pil kullanmanız robotu daha uzun süre ve daha verimli çalıştıracaktır.)
- 6’lı AA Pil Yuvası
- Anahtar
- Jumper
- Alternatif Gövde
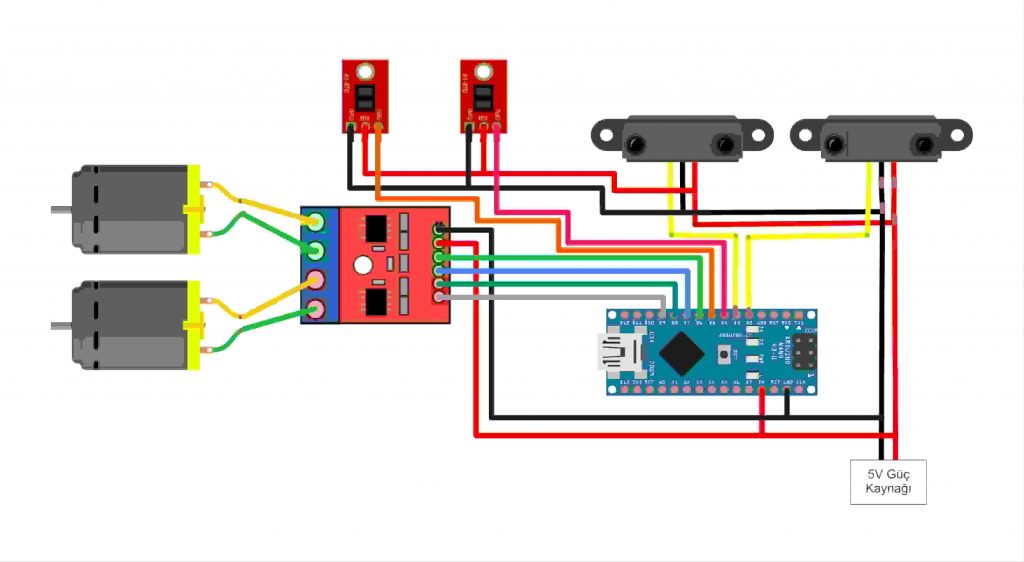
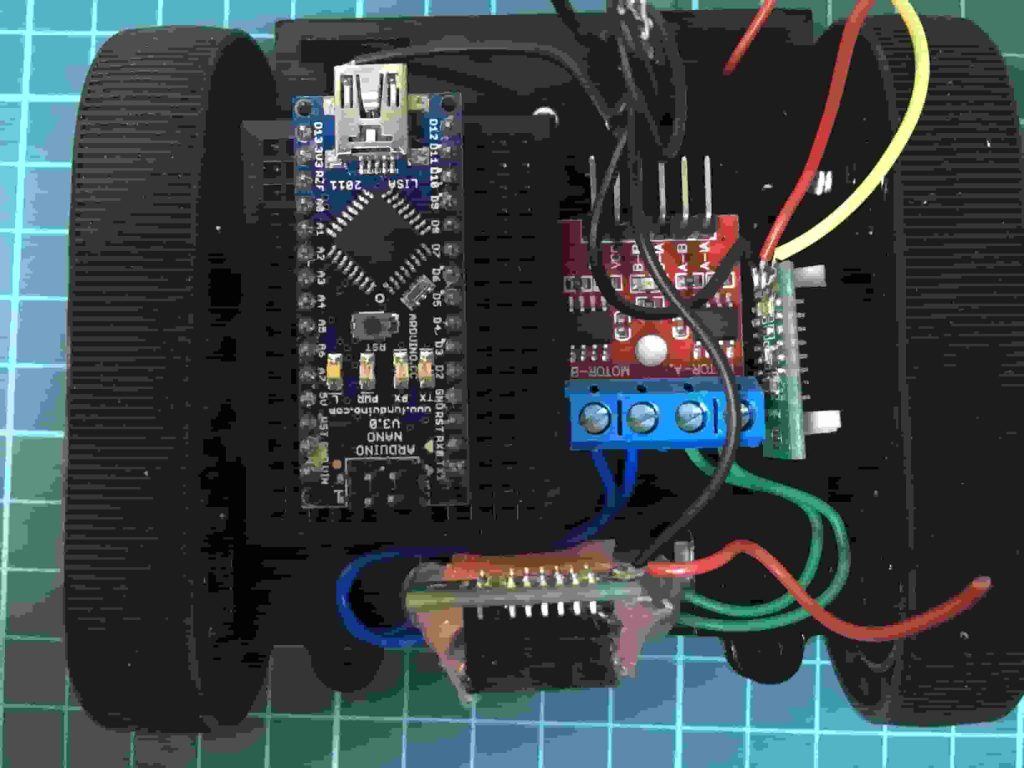
Sumo Robot Devresi
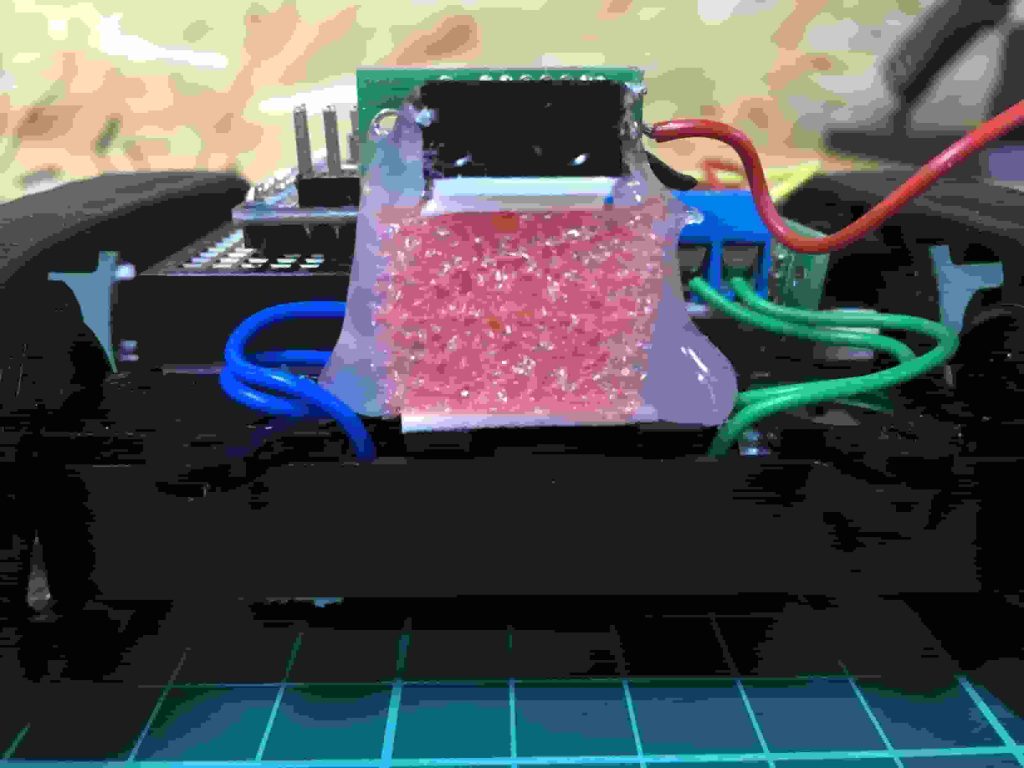
Sumo robotlarda gövde tasarımı çok önemlidir. Yarışmalarda kurallar gereği rakip robota ve sahaya zarar verecek parçalar kullanılamaz. Gövdede kullanılan malzemeler ve robottaki yerleri ağırlık merkezi açısından önem taşır. Robotun ağırlık merkezi doğru ayarlanmadığı takdirde sahadan savrulması kolay olacaktır. Bunun haricinde gövdeye uygun motor tercihi yapılmalıdır. Motor tercihi yaparken ihtiyacımız olan devir ve tork değerlerini belirleyip kullanılan gövdeye göre seçmek faydalı olacaktır.
Sensörler
Robotun algoritmayı kurabilmesi için sensörlere ihtiyacı vardır. Ne tür sensör kullanacağımız, kaç adet kullanacağımız bize kalmış. Malzeme listesinde de gördüğünüz üzere rakip robotu algılamak için 2 adet kızılötesi Sharp sensör kullandık. Biri robotun önüne, biri de sağına bakıyor. Böylelikle önde veya sağda bir cisim algılanmıyorsa robot kendi etrafında dönerek aramaya başlıyor. Siz kendi yaptığınız robotunuzda sensör sayısını yükseltebilir, sensörleri farklı şekilde yerleştirebilirsiniz.
Ayrıca robot Dohyo’nun siyah ve beyaz renklerden oluşan alanını algılayabilsin diye 2 adet çizgi sensörüne sahip. Dohyo’nun sınırlarında olan beyaz çizgiye geldiğinde sahanın dışına çıkmamak için bu sensörleri kullanmaktayız.
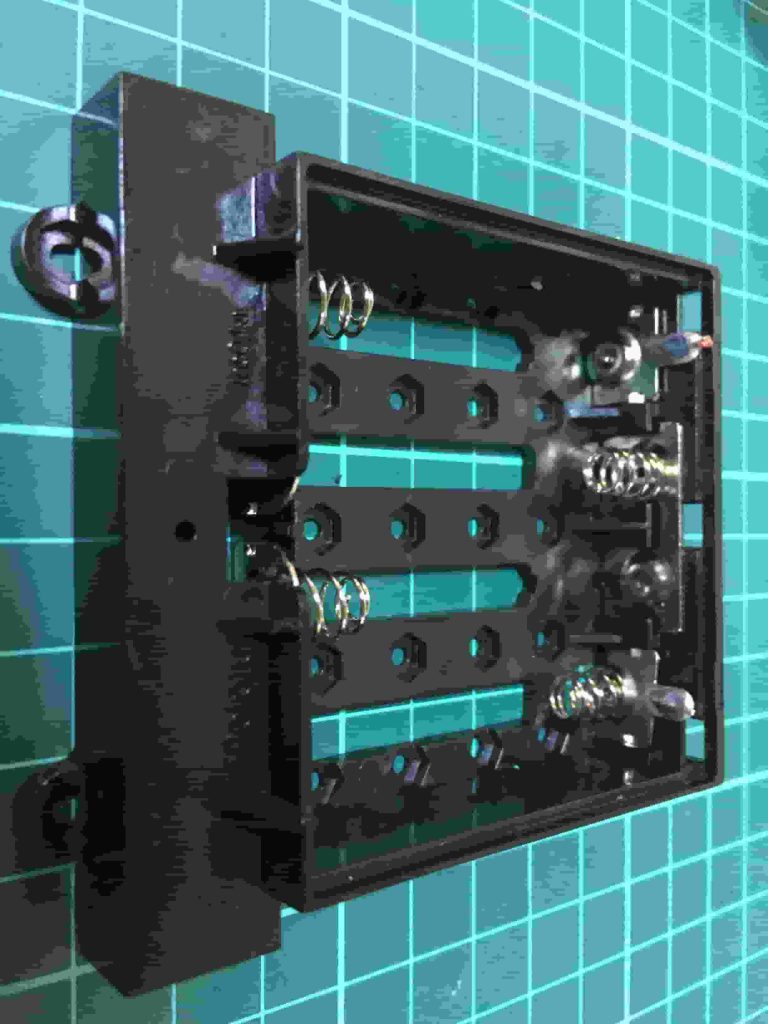
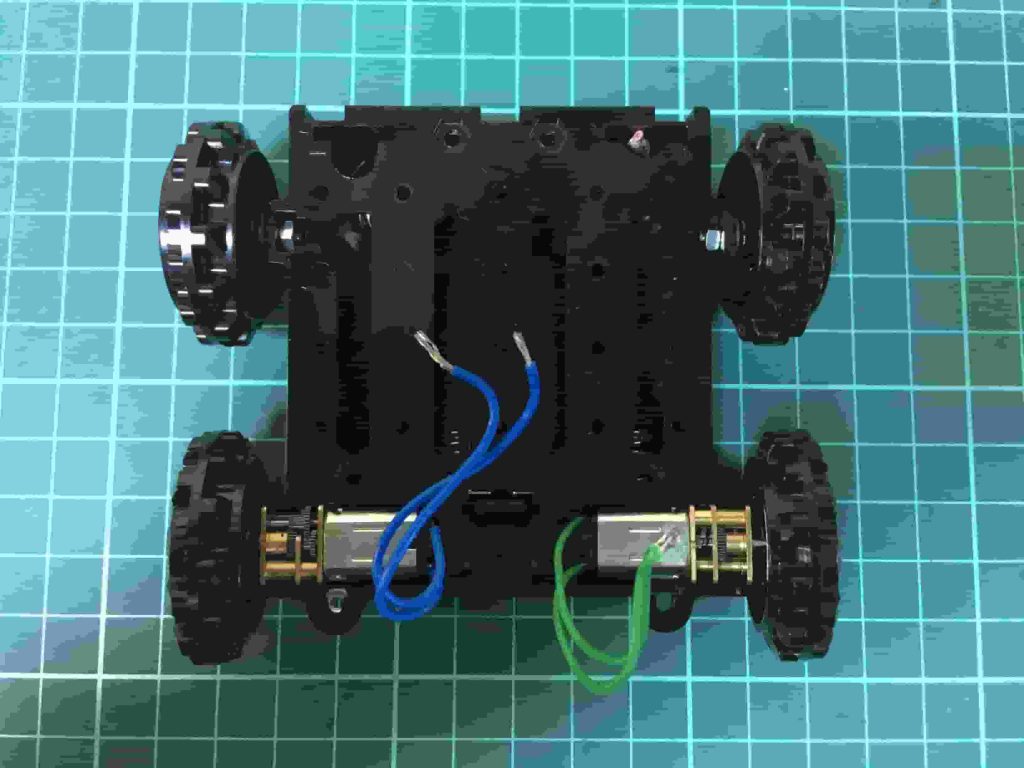
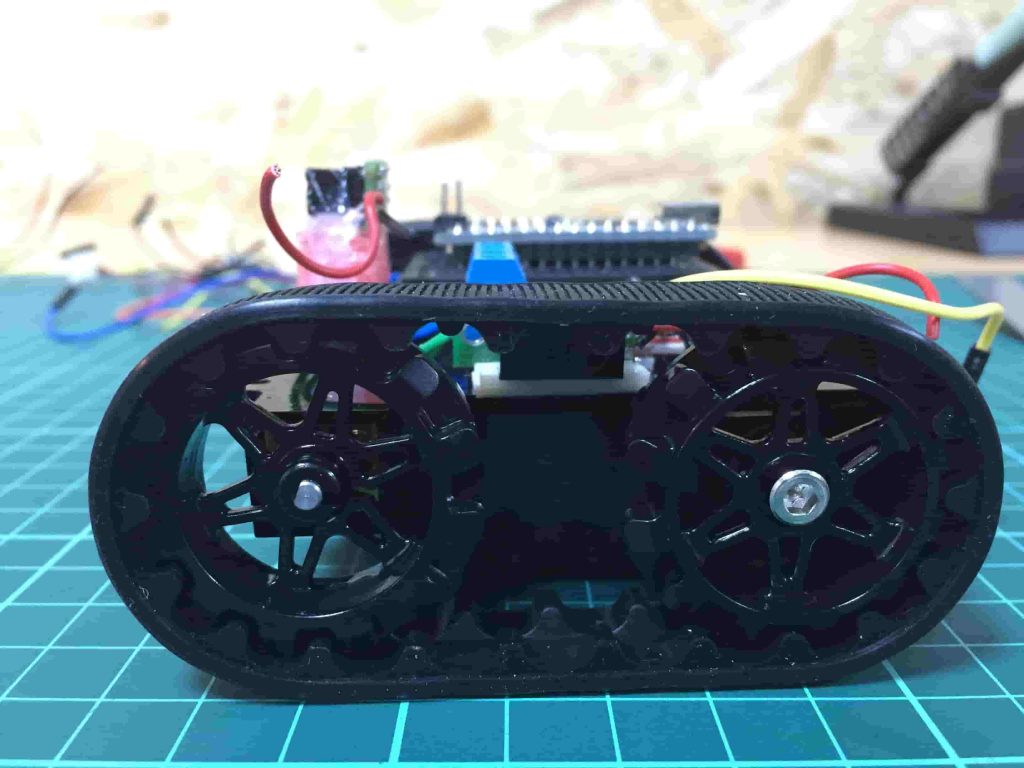
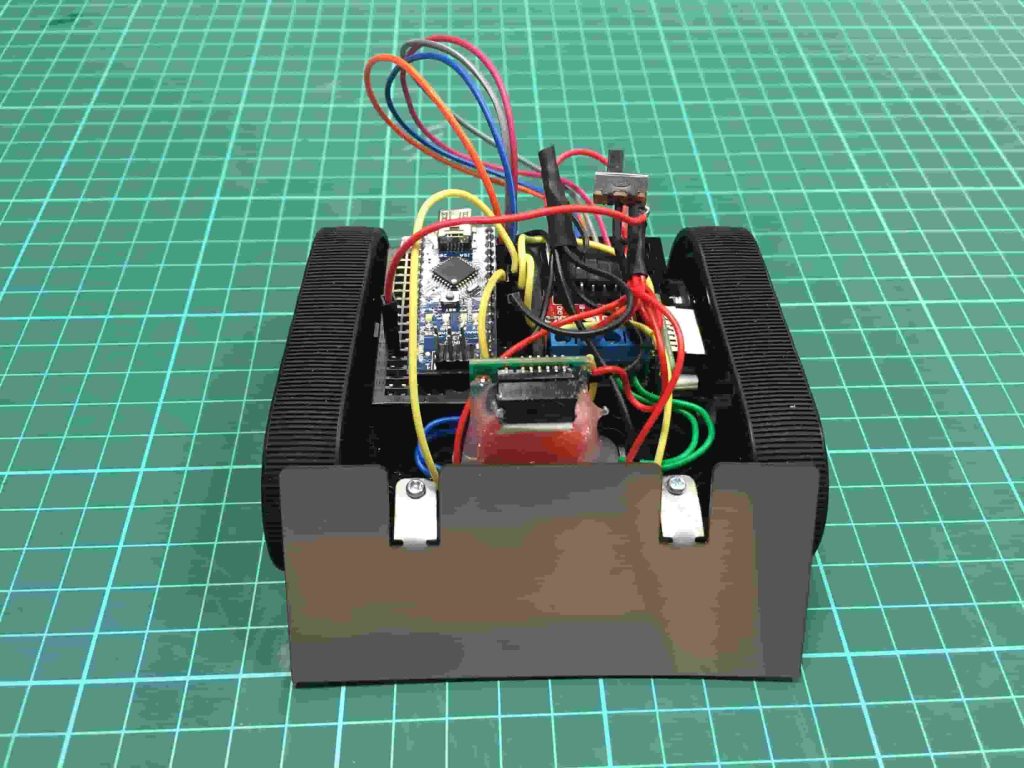
Gövde Montajı
Arduino Programı
#define OnSensor 3
#define SolSensor 2
#define SagCizgi 4
#define SolCizgi 5
#define MotorR1 7
#define MotorR2 6
#define MotorL1 9
#define MotorL2 8
void setup() {
pinMode(OnSensor, INPUT);
pinMode(SolSensor, INPUT);
pinMode(SagCizgi, INPUT);
pinMode(SolCizgi, INPUT);
pinMode(MotorR1, OUTPUT);
pinMode(MotorR2, OUTPUT);
pinMode(MotorL1, OUTPUT);
pinMode(MotorL2, OUTPUT);
//Serial.begin(9600);
while(digitalRead(OnSensor) == 1);
}
void loop() {
if(digitalRead(SagCizgi) == 0 && digitalRead(SolCizgi) == 0){
if(digitalRead(OnSensor) == 0 && digitalRead(SolSensor) == 1){
ileri();
}
if(digitalRead(OnSensor) == 1 && digitalRead(SolSensor) == 0){
sol();
}
if(digitalRead(OnSensor) == 1 && digitalRead(SolSensor) == 1){
ileri();
}
}
else{
geri();
delay(1000);
sol();
delay(400);
}
}
void ileri(){
digitalWrite(MotorR1, HIGH);
digitalWrite(MotorR2, LOW);
digitalWrite(MotorL1, HIGH);
digitalWrite(MotorL2, LOW);
}
void geri(){
digitalWrite(MotorR1, LOW);
digitalWrite(MotorR2, HIGH);
digitalWrite(MotorL1, LOW);
digitalWrite(MotorL2, HIGH);
}
void sol(){
digitalWrite(MotorR1, HIGH);
digitalWrite(MotorR2, LOW);
digitalWrite(MotorL1, LOW);
digitalWrite(MotorL2, HIGH);
}
void sag(){
digitalWrite(MotorR1, LOW);
digitalWrite(MotorR2, HIGH);
digitalWrite(MotorL1, HIGH);
digitalWrite(MotorL2, LOW);
}
Evet arkadaşlar, böylelikle bir projemizi daha tamamlamış olduk. Bir başka projede görüşmek üzere.







merhaba. bu sumo robotunuz. kodu degerlendim. hata vermedi. motor ve sharp ve cny70
calismadi. motorlar donuyor. sharp ve sensor calismadi?
sizce ne olur. bide bu robot govdesi. motor surucu. almak. isterdim.ilk önce paranizi. alacaksiniz.
sonra. bu dediklerimi. yolarsiniz. isvecten. selamlar. umarim cevap verirsiniz
kodla ilgili bir takım sorun var şu aralar kendim yazarak bişiler yaptım ama hadi hayırlısı 😀
Abi ben lityum piller çalıştırılan ama kalem boyutu yok
öncelikle yorumu tam anlamadım ama lityum pil takmak istiyorsan zaten kalem boyutu bulamazsın,küçük bir ihtimal dönüştürücü kap olabilir ama aliexpress gibi yerlerde var genelde
merhaba hocam ben videoda anlattığınız şekilde hepsini uyguladım ancak robot çalışıyor ama yinede çizgi dışına çıkıyor ve paletleri taktığım zaman ise çok yavaş ilerliyor geri dönerseniz çok iyi olur teşekkürler
Merhaba, paletin montajını tekrar kontrol edebilir misiniz? Sürtünmeden kaynaklı yavaşlıyor olabilir. Bunun haricinde motorların hızları az geldiyse biraz daha arttırabilirsiniz. Çizgi dışına çıkma konusunda ise, çizgi sensörlerinin doğru çalıştığını kontrol edebilir misiniz?
Evet cizgi sensorleri dogru calisiyor ancak robot geri geri geldiginde cizgi disina cikiyor
alan ile ile alakalı olabilirmi.Robota göre küçük kalmış olabilir ve robot önce başladığı işi bitrmeye hedefli olabileceği için dışarı çıkabilir.
merhaba hayirli islerdilerim size sumo robotunuz. yaptim. calisti. elin koluna saglik
merhaba kodları yazdım ama robotun sadece sol tekerleri hareket ediyor.Yardımcı olursanız sevinirim.
şimdi birsürü neden olabilir
1-motor lehimi yanlış olabilir
2-motor içindeki bakır yerinden kaymış olabilir
3-motor sürücü bozulmuş,yanmış olabilir
4-bağlantıların yanlış olabilir
5-bir kablo iletkenliğini yitirmiş yada içten kopmuş olabilir
QTR-1A çizgi sensörünün fritzing çizimini hiç bir sayfada bulamadım.Yardımcı olabilir misiniz?
Buradan indirebilirsiniz: https://github.com/greenoneo0/fritzingParts
Teşekkür ederim
kolay gelsin ben üç sensörlü yapmak istiyorum ön sol sağ şeklinde kodta yardımcı olablirmisiniz
buna gerek yok çünkü önde yadasolda yoksa robot zaten sağa gidiyor diye biliyorum
Tekerlere neden minik rulmanlar kullanmıyorsunuz.. bu kadar cimri olmayın..pul u tekere takmak ta neymiş
Robot seti içerisinde rulman bulunmamaktadır. Arzu edersiniz kendiniz temin ederek kite ekleyebilirsiniz.
Merhaba ben 6. SINIF ÖĞRENCİSİYİM SİZİN KAYNAKLARINIZDAN YARARLANARAK SUMO ROBOTU YAPACAĞIM VE TÜBİTAK İÇİN Bİ PROJE YAPACAĞIM FAKAT GÖLSELLİ DEVRELERİ PEK ANLAYAMADIM. LÜTFEN DAHA DETAYLI BİR VİDEO DAHA ÇEKEBİLİRMİSİNİZ NOT:SİZİN SATIŞA SUNDUĞUNUZ MALZEMELERİ TEMİN EDECEĞİM.
BANA VİDEOLARIMIN YORUM KISMINDAN ULAŞABİLİRSİNİZ https://www.youtube.com/channel/UCovhqBql8LZNtCtir1nkzSw
QTR-1A mı yoksa QTR 1C mi tercih etmeliyim.(mini sumo için)
yazdığınız code da hata var
kişiden kişiye değişir motor ve diğer pin bağlantılarına göre
büyük ihtimalle motorların yanlış dönüyordur bana sorunu anlat yardımcı olmayı denerim
Merhaba geçen günlerde sitenizden Arduino Nano 328 (klon) isimli kartı aldım fakat şuan karta kodları yükleyemiyorum bana hata veriyor kodlarım doğru olmsına rağmen bu oluyor ayrıca tools kısmında com3 şeklinde de port gözüküyor lütfen yardımcı olun.
Eğer klon aldıysan driver yüklemen gerekebilir. Arduino uno driverlarını internetten araştırırsan bulabilirsin.
bazen bende de delay komutu yazsam hata veriyor normal boş bir kod göndermeyi dene belki kodunun derlemesi arduino nanoya uygun olmayabilir
merhaba adım kağan robot yaptım ama lipler de ısınma var on of swincth of yaptığım da ısın ma oluyor kuladığım lipler sarj edile bilen piller bütün bağlantıları konturol ettim ama ısın ma var anlayamadım bir yerde sonrun var anlamadım 2 a of on swicth kullanıyorum onda sorun ola bilirmi ? yardım ederseniz sevinirim
merhaba motoroları nasıl hızlandıra biliyoruz ? motorlar çok yavaş ilerliyor
kolay gelsin çok güzel yapmışsın abi Her yolu denedim çalıştırdım ama devre sınıyor abi kapatığım da lipo pil doldurula bilen ve lion pil kullandım banamısın demiyor çalıştırdığım da çalışıyor kapatığımda açma kapama düymesinin + kısmı ısınıyor ne yapsam bulamadım bana bir yardımcı olun ya bu olayı bir çözelim kullandım motor sürücü yanı sürücü değil L9110s çalıştırdım motorlar kablo ile taktımda yavaş çalışıyor ve pil taktıım da hızlanıyor motorlar neden böyle oluyor bilimiyorum arduino anon bozulmuştu onu da yaptım tek sorun bazen usb görmemesi geçen gün sizden arduino anano almıştım kargo gelmdi geri iade edildi sizlere tekrar göndere bilirmisniz kolay gelsin şimdi den saygılar
arduino nano r3 kolan yaptım ben sadece motorlerın hızlnaması lazım yavaş kalıyor bir L9110s yaptım çalışıyor ısınma sonunu çözdüm
çok güzle olmuş aslannparçası
linkler farklı sayfalara yönlendiriyor
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0x11
hatalarını alıyorum klon sürücü yüklemesi yaptım hala aynı
Abi bu sharp sensore bi tanesine param yetti oburkusune baska bi sensor onerir misin
Birşey sorabilir miyim normal sumo için malzemeler ne olmalıdır şimdiden teşekkürler.
Zumo Shield’e arduino girmiyor.
Merhabalar ,sensörlerin kütüphanelerini ekgmail.comlemek gibi bir durum söz kousu değil mi acaba ?
merhabalar ben dediğiniz gibi herşeyi yaptım yazılımda hata çıkmadı ama bant ile yaptığım dairenin dışına çıkıyor ve cismi dışarı atmıyor bunun nedeni ne olabilir yardımcı olabilirseniz sevinirim.. 🙂
merhaba motorları hızlandırmak için ne yapmak lazım nasıl bir şey yazmak lazım hızlandırmak için nereye yazıcam 600 v leri çok yavaş kaldı şimdiden Teşekkürler
6V 600 Rpm Redüktörlü Mikro DC Motor ULTRA HP motorları hızlandıracam nasıl yapabilirim
DAHA YÜKSEK ve az voltla çalışan bir motor almalı yada uygun redüktor varsa takmalısın
merhaba devre calisiyor hata kod yazilimda hata var. duzeltim robot harika calisiyor. isterseniz video ve kodu kondereyim mail adresi bana gonder. meslegim elektronik yardim severim. ögrencilere yardim icin.isvecten selamlar
merhaba hayirli isler palletli pololu aynisi aldim
motorlar 6v.500rpm sharp sensör digital. aynisi.
2 QTR pololu sensör taktim
robot calisiyor.fakat piste cikiyor. sizin gibi cift tarafli. bant kulandim.
robot piste cikiyor. hata ne olur koda olurmu. sizden ricam. bunun hakinda.
cevap verirseniz. cok sevinirim.robotpiste cikiyor. sharp sensör calisiyor.
QTR sensörde calisiyor. umarim. cevap verirsiniz. hayirli.isler
isvecten selamlar. bahaddin ates
merhaba robot yaptim hata koda. sensor tcrt5000. kulandim harika calisiyor
Merhaba kullandığınız sensör yerine
SHARP 0A41SK bu sensörü kullansak sıkıntı çıkar mı çizgi konusunda ?
10 lira daha ucuz
merhaba,
devreyi kurduk fakat Sharp GP2Y0D815Z0F Kızılötesi Sensör 15 cm – PL-2465
sensorlerinin lambaları sürekli yanıyor. sensoru nasıl resetleyeceğiz.
sistemi lipo ile kurunca ön ve sol sensör sanırım yandı. lipo ile kurulumu var mıdır
Merhabalar, damarli ve damarsiz kablo farki nedir hangisini kullanmak daha mantikli olur ?
rbot harika calisti teskurler
sitedeki kod yazilim hatasi var duzeltim calisti isvecten selamlar
islerinizden basarilar dilerim sayenizde sumo robotu yaptim calisri tesekurler
merhaba robotu yaptim calisti kodu yazilista bazi yerler yanlis yazilmis duzeltim calisti hayirli islerim
istiuorsaniz video gondereyim
merhaba robot yaptim hata koda. sensor tcrt5000. kulandim harika calisiyor
L9110 motor sürücü kartının fritzing çizimini bulamadım yardımcı olabilirmisiniz