Maker dünyasında klasik projeler artık kabuk değiştiriyor. Standart bir mesafe sensörü
okumasının ötesine geçiyoruz! Bugün, Arduino Tabanlı UNO R3 Geliştirme Kartı (CH340)’nın sensör verilerini Processing’in görsel gücüyle birleştirerek, sadece mesafe ölçen değil, algıladığı nesneleri hafızasında tutan ve “iz bırakan” profesyonel bir radar sistemi tasarlıyoruz.
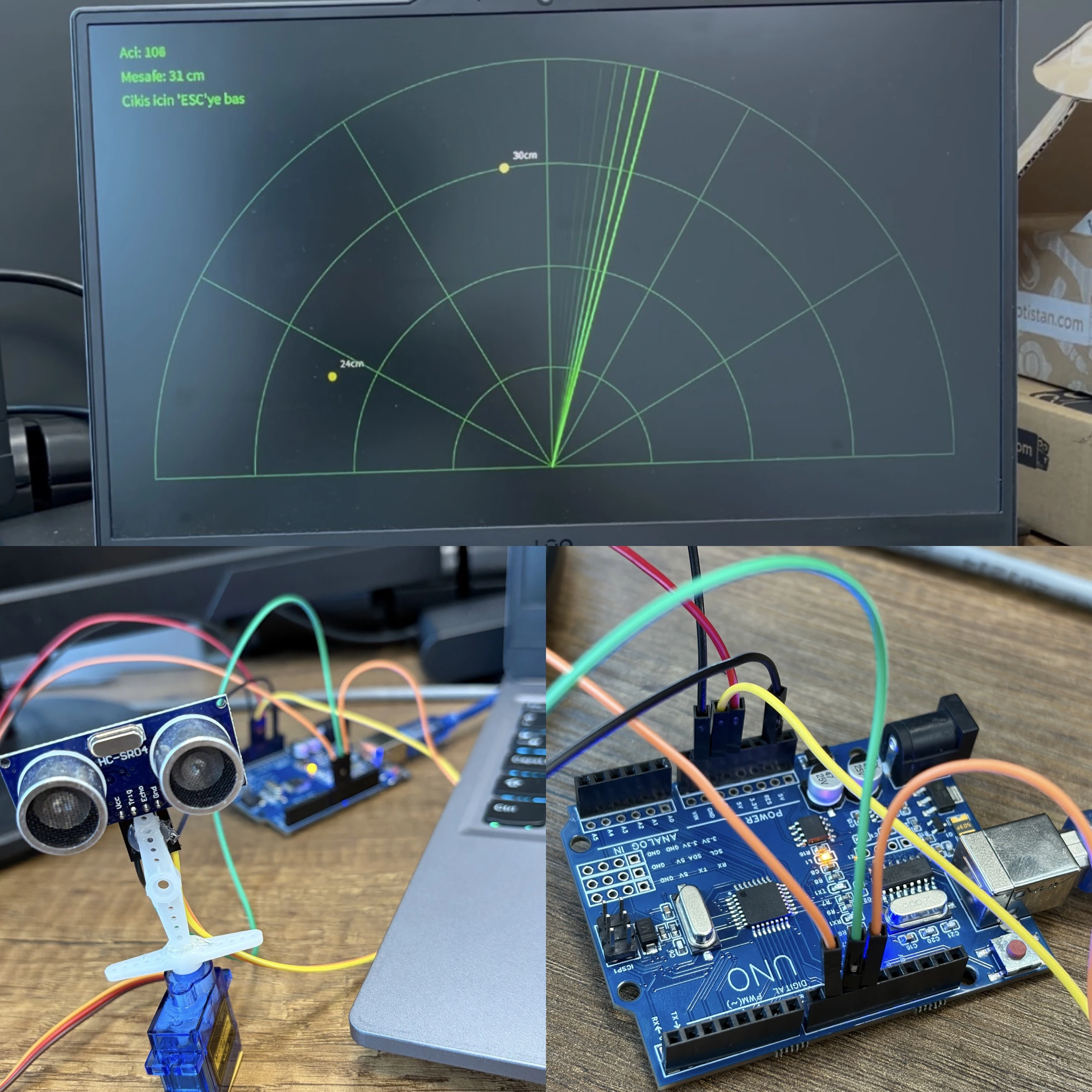
Projede, sıradan bir radarın dışına çıkarak ekranı tamamen kaplayan, nesne
gördüğünde sarı noktalarla işaretleme yapan ve bu noktaları 2 saniye boyunca
ekranda tutan akıllı bir arayüz geliştirdik.
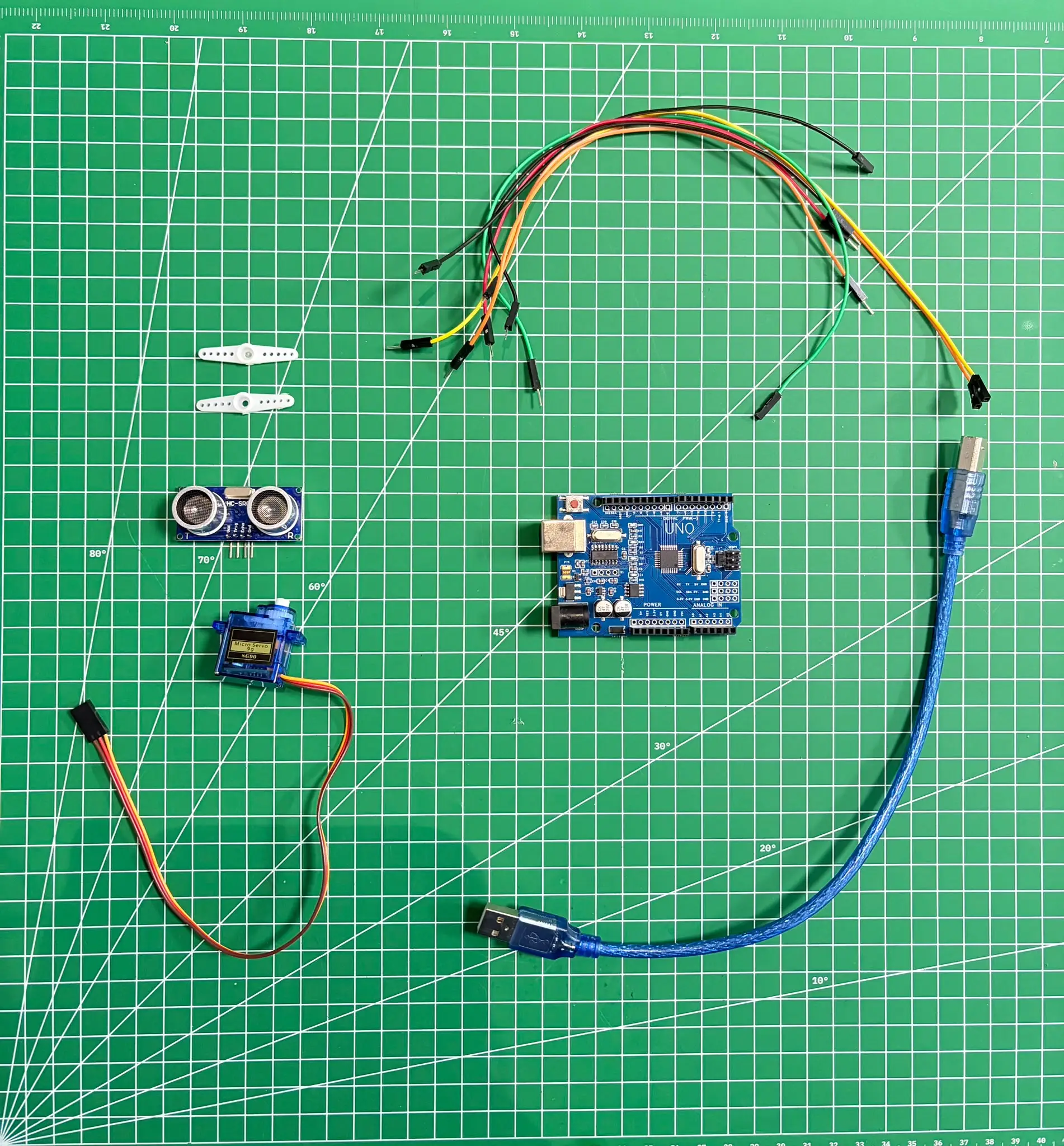
Gerekli Malzemeler
| Malzeme | Özellik / Tip |
| Arduino Tabanlı UNO R3 Geliştirme Kartı (CH340) | Ana Kontrol Kartı (Mikrodenetleyici Kartı) |
| SG90 Servo Motor – 180 Derece | Mekanik Dönüş Kolu |
| HC-SR04 Ultrasonik Mesafe Sensörü | Engel Tespit ve Mesafe Ölçüm Gözü |
| 40 Pin Ayrılabilen Dişi-Erkek M-F Jumper Kablo-200 mm | Bağlantı Elemanı |
| 40 Pin Ayrılabilen Erkek-Erkek M-M Jumper Kablo-300 mm | Bağlantı Elemanı |
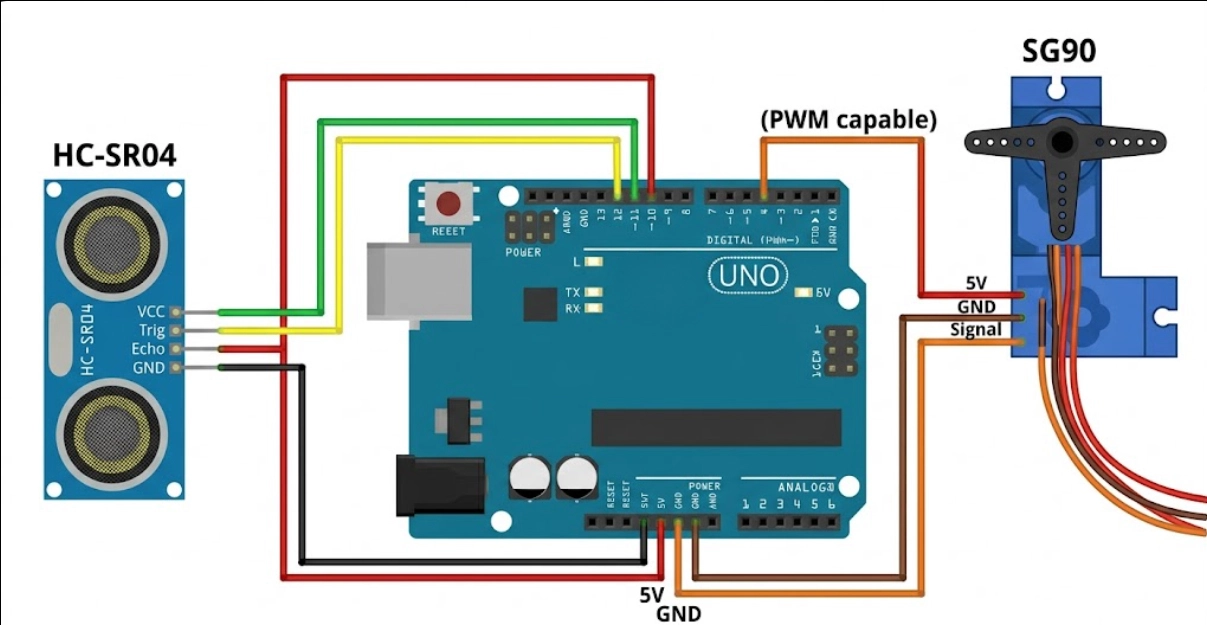
Bağlantı Şeması
Projemizin elektronik devre bağlantılarını yaparken pin eşleşmelerine dikkat etmeniz oldukça önemlidir. HC-SR04 sensörü ve servo motor bağlantılarını UNO kartınız üzerinde aşağıdaki gibi gerçekleştirebilirsiniz:
- HC-SR04 Sensör:
VCC -> 5V,Trig -> Dijital Pin 10,Echo -> Dijital Pin 11,GND -> GND - SG90 Servo Motor:
GND (Kahverengi) -> GND,VCC (Kırmızı) -> 5V,Signal (Turuncu) -> Dijital Pin 9
Önemli Not: Projede kullanılan CH340 çipli Arduino tabanlı geliştirme kartımızın bilgisayarınız tarafından tanınması için bilgisayarınıza CH340 sürücülerinin (driver) kurulu olduğundan emin olun.
Projenin Çalışma Mantığı
Geliştirdiğimiz akıllı radar sistemi iki ana katmandan oluşmaktadır:
- Donanım Katmanı (Geliştirme Kartı): Arduino tabanlı UNO R3 kontrol kartımız, SG90 servo motoru 0 ile 180 derece arasında 2’şer derecelik adımlarla sürekli döndürür. Servo hareket ederken üzerindeki HC-SR04 ultrasonik sensör her açıda önündeki engelin mesafesini ölçer. Elde edilen bu açı ve mesafe verileri, aralarında virgül barındıran ve nokta ile biten (
aci,mesafe.) özel bir protokol biçiminde seri port (USB) üzerinden bilgisayara fırlatılır. - Görselleştirme Katmanı (Processing): Bilgisayar tarafında çalışan Processing arayüzü, seri porttan akan verileri milisaniyeler içinde kesintisiz olarak ayrıştırır. Eğer donanımdan gelen veri 40 cm’nin altında bir engele işaret ediyorsa, sistem o koordinata sarı bir hedef izi bırakır. Bu akıllı iz, radar çizgisi başka yönlere kaysa bile tam 2 saniye boyunca ekranda sönerek kalır ve gerçek bir askeri radar deneyimi sunar.
Kodlama Aşaması
Projemizin sorunsuz çalışabilmesi için hem geliştirme kartımıza yüklenecek kontrol kodunu hem de bilgisayarda çalıştıracağımız Processing görsel arayüz kodunu hazırladık.
1. Kontrol Kartı Kodu (C/C++ – Arduino IDE Uyumlu)
Aşağıdaki kod bloğu servonun 0-180 derece arasında akıcı bir şekilde gidip gelmesini sağlar ve mesafe formülünü (sure * 0.034 / 2) kullanarak seri porta veri gönderir.
2. Processing Kodu (Görsel Arayüz Yazılımı)
Processing IDE’si üzerinde Java dilinde derlenen bu kod, tam ekran modunda modern bir radar çizgisi ve tespit edilen cisimlerin konumunu gösteren dinamik sarı noktalar üretir.
Projede kullanılan kodları indirmek için tıklayınız.
Maker İpucu: Processing kodundaki port adını (örn: COM3, COM5) kendi bilgisayarınıza göregüncellemeyi unutmayın!
Kendi Savunma Sistemini Kur!
Geleceğin teknolojileri sadece kapalı laboratuvarlarda değil, senin masanda şekilleniyor! Bu proje ile sadece bir mesafe sensörünü mikrodenetleyici kartınla okumayı değil, gelen veriyi dinamik listelerle yazılım hafızasında nasıl tutacağını ve Processing motoruyla profesyonelce nasıl görselleştireceğini öğrendin.
Artık radar ekranın hazır! İster odanın güvenliğini sağla, ister otonom robot projelerine entegre et. Soru, öneri ve kendi eklemelerinizi yorumlar kısmında bizimle paylaşmayı unutmayın!






