Merhaba arkadaşlar. Bu yazımızda Android işletim sistemli akıllı cihazlar tarafından kontrol edilebilen Robot Kol uygulaması yapacağız. Projeyi internette bulup, tasarımını çok beğendik ve yapmaya karar verdik.
Projemiz Mobil Uygulama, Arduino ve 3 boyutlu yazıcıdan basılmış mekanik olmak üzere 3 kısımdan oluşmaktadır.
Kendine ucuz ve kaliteli 3D yazıcı almak istersen, yazımızı incele!
Gelin önce malzemelere bi’ göz atalım.
Projeye ait malzeme listesi
- 4 x Tower Pro SG90 RC Mini Servo Motor
- Arduino Sensor Shield
- Arduino Uno (Tercihe bağlı klon veya orijinal kullanabilirsiniz.)
- 5V 3A Voltaj Regülatör Kartı
- 12V Adaptör
- HC-06 Bluetooth Modülü
- Jumper Kablo
Projenin montajına buradan erişebilirsiniz.
Projenin 3D baskı dosyalarına buradan erişebilirsiniz.
App Inventor Nedir?
MIT tarafından geliştirilen ve bloklar ile “sürükle-bırak” mantığında programlanabilen Android uygulama geliştirme programıdır. Kullanmanız için Android programlamaya dair hiçbir bilginiz olmasına gerek yoktur 😊
Projeden kısaca bahsetmek gerekirse önce MIT App Inventor 2 isimli bir uygulama geliştirme programında arayüz oluşturuyoruz. Oluşturduğumuz uygulama yoluyla Android cihazımızı Arduino’ya bağladığımız Bluetooth modülü ile eşleştiriyoruz. Bu eşleşme sayesinde Robot Kolunu Android cihaz üzerinden kontrol edebiliyoruz.
Öyleyse başlayalım !
Önce MIT App Inventor 2 programından bir uygulama oluşturalım.
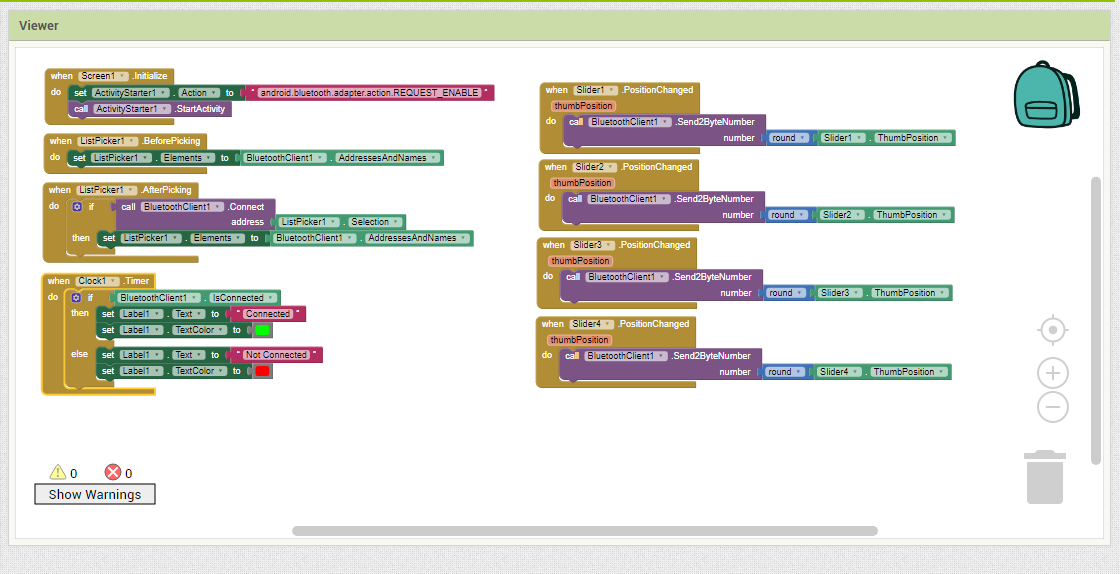
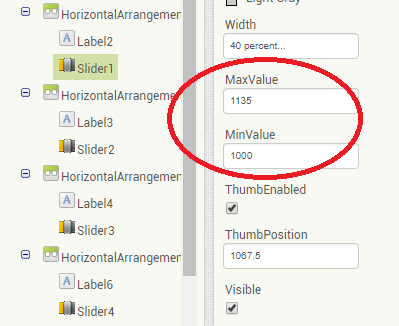
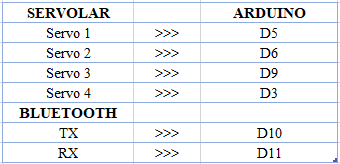
Tasarım kısmında Arduino’ya göndereceğimiz Bluetooth sinyallerini “slider”lar ile kontrol edebiliyoruz. Arduino programımızdaki sinyal değerlerinin ne anlama geldiğini aşağıdaki şekilde inceleyebilirsiniz.
Uygulamanın tasarımı tamamen size kalmış. Bizim tasarımımız örnekteki gibidir :
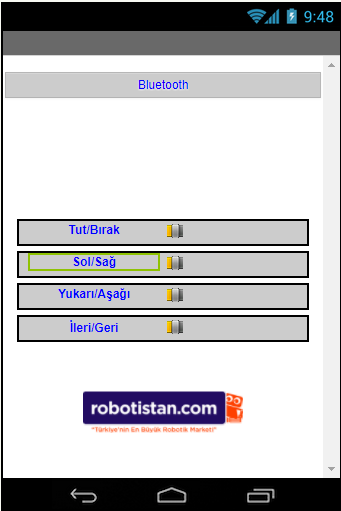
Örnek Apk dosyasına buradan ulaşabilirsiniz.
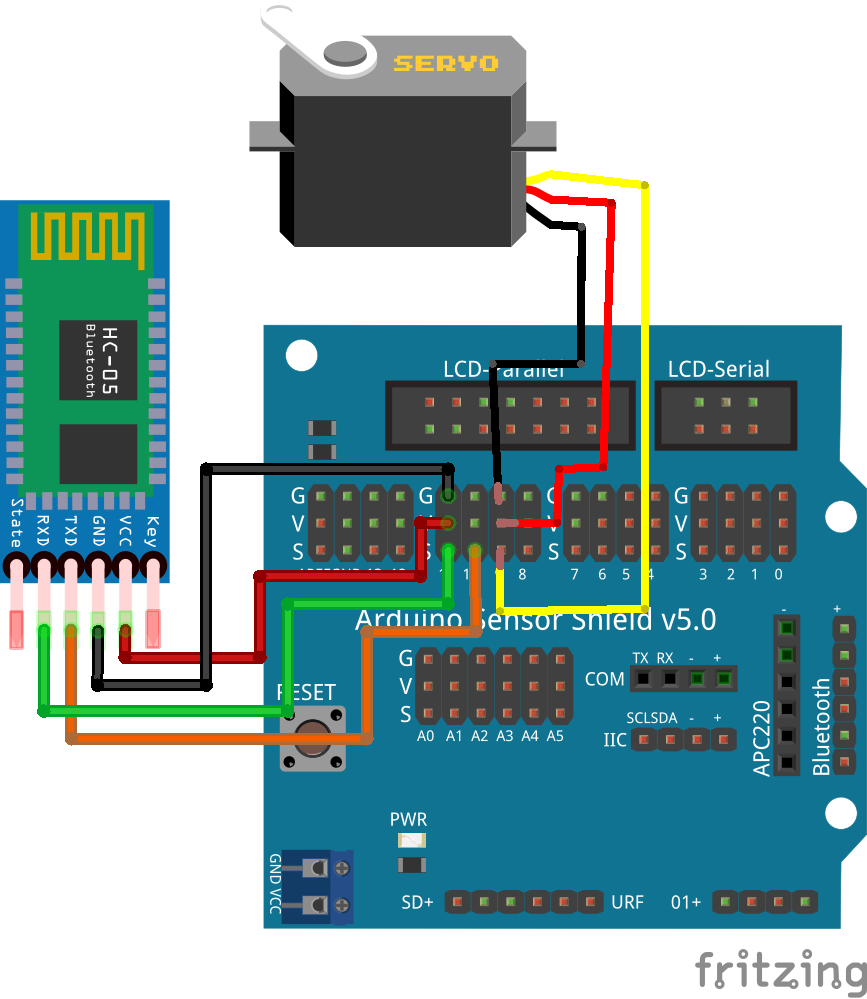
Devre Şeması
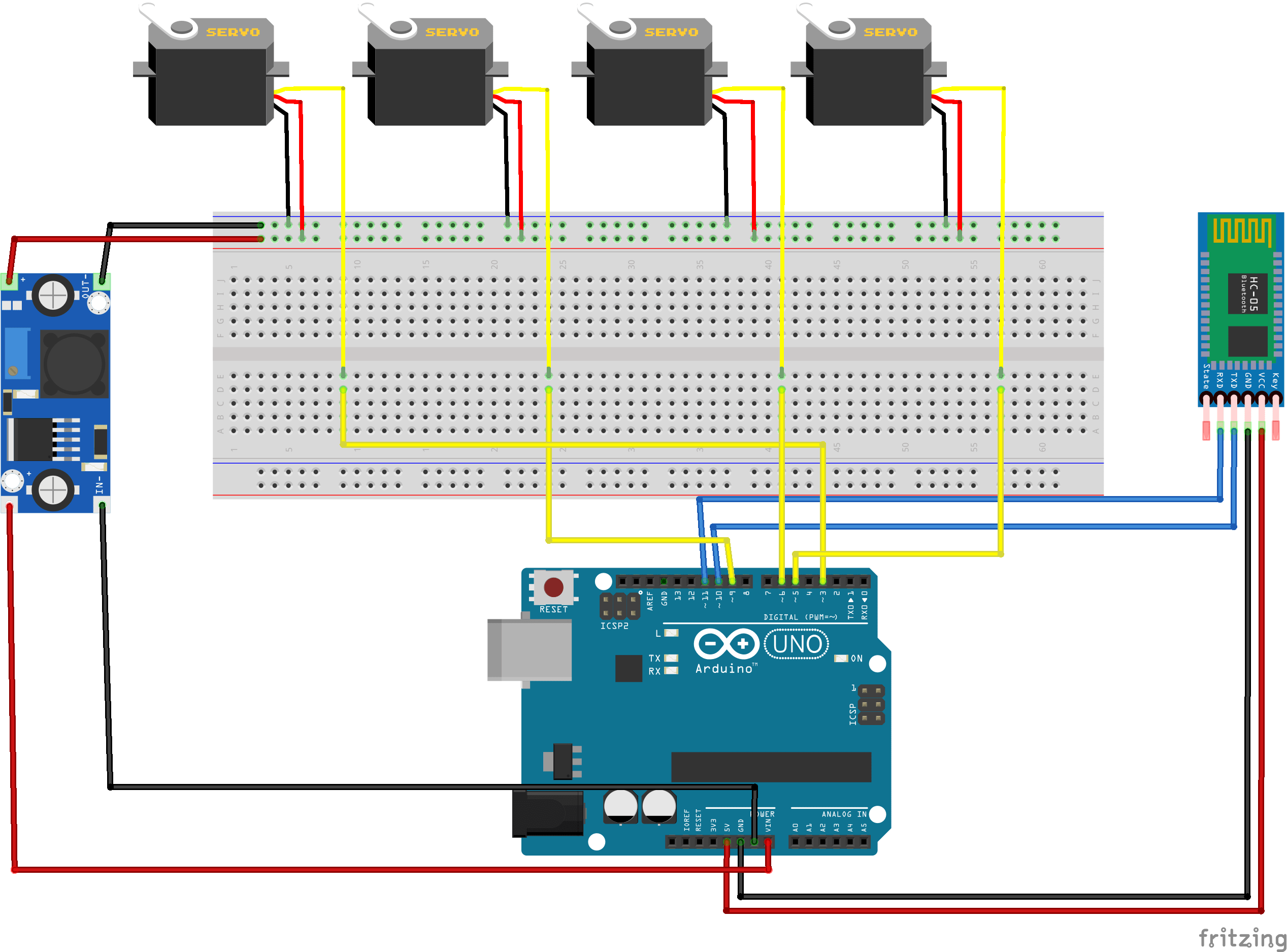
Bağlantıları buradan da takip edebilirsiniz :
Arduino, 12V DC Adaptör ile beslenmektedir.
Shield-Servo Bağlantı Örneği
Arduino Programı
Öncelikle programın çalışma mantığından bahsetmek istiyorum. Programın hemen başında Servo motorlarımızı, Bluetooth modülümüzü ve pinlerini tanımlıyoruz. Void setup() bölümünde ayrıca seri iletişimi etkinleştirmek için serial.begin(9600); , bluetooth iletişim için bluetooth.begin(9600); fonksiyonlarını yazıyoruz. Void loop() kısmı programımızın ana fonksiyonudur. Eğer 2 bit veya üzeri bluetooth sinyali gelirse ana fonksiyonun çalışmasını istiyoruz. Eğer bu şart gerçekleşiyor ise fonksiyonumuz servo motorumuzun pozisyon bilgisini bluetooth sinyalleri ile okumaya başlıyor. ( unsigned int servopos = bluetooth.read(); unsigned int servopos1 = bluetooth.read(); unsigned int realservo = (servopos1 *256) + servopos; )
Android cihazımızdan gönderdiğimiz Bluetooth sinyalleri 1000-1135 arasında ise birinci servomuzu 0-135 derece arasında kontrol edebiliyoruz. (Tut/Bırak)
Bluetooth sinyalleri 2000-2090 arasında ise ikinci servomuzu 0-90 derece arasında kontrol edebiliyoruz. (Sağ/Sol)
B sinyalleri 3000-3180 arasında ise üçüncü servomuzu 0-180 derece arasında kontrol edebiliyoruz. (Yukarı/Aşağı)
Bluetooth sinyalleri 4000-4120 arasında ise dördüncü servomuzu 0-150 derece arasında kontrol edebiliyoruz. (İleri/Geri)
Not: Derece değerleri robotun mekaniğine göre değişebilir. Robotumuz 3d baskı olduğu için montajda ve robotun hareketinde çeşitli problemler meydana gelebilir. Robotun yazılımı, bu problemlere göre güncellenebilir.
#include <SoftwareSerial.h>
#include <Servo.h> // servo ve seri haberleşme için kütüphaneleri tanımlıyoruz.
Servo myservo1, myservo2, myservo3, myservo4; // servolarımızı tanımlıyoruz.
int bluetoothTx = 10;
int bluetoothRx = 11; // Bluetooth alıcı vericilerini tanımlıyoruz.
SoftwareSerial bluetooth(bluetoothTx, bluetoothRx);
void setup()
{
myservo1.attach(5); // Servolarımızı Arduino'nun pwm(~) çıkışlarına bağlayalım.
myservo2.attach(6);
myservo3.attach(9);
myservo4.attach(3);
Serial.begin(9600);
bluetooth.begin(9600); // 9600 baud'luk bir haberleşme tanımlayalım.
}
void loop()
{
if (bluetooth.available() >= 2 ) // 2 hız seviyesindeki Bluetooth sinyal alıyor mu?
{
unsigned int servopos = bluetooth.read();
unsigned int servopos1 = bluetooth.read();
unsigned int realservo = (servopos1 * 256) + servopos;
// Alınan sinyaller kaydediliyor.
// AppInventor'da her servo için ayrı sinyal göndermiştik.
//Şimdi de her servo için tanımlanan sinyalin alınıp alınmadığını kontrol ediyoruz.
//realservo , Uygulamamızdan gelen sinyal değerleri.
// Bu değerler her servo için ayrı ayrı tekrar tanımlanıyor.
// "map" komutu ile bu sinyalleri, motora vereceğimiz açı değerlerine çeviriyoruz.
// örnek: map(servo,alınan min.sinyal,alınan max.sinyal,min.Açı,max.Açı);
if (realservo >= 1000 && realservo <= 1135) // tut bırak
{
int servo1 = realservo;
servo1 = map(servo1, 1000, 1135, 0, 135);
myservo1.write(servo1);
delay(10);
}
if (realservo >= 2000 && realservo <= 2090) { // sağ sol
int servo2 = realservo;
servo2 = map(servo2, 2000, 2090, 0, 90);
myservo2.write(servo2);
delay(10);
}
if (realservo >= 3000 && realservo <= 3180) { // yukarı aşağı
int servo3 = realservo;
servo3 = map(servo3, 3000, 3180, 0, 180);
myservo3.write(servo3);
delay(10);
}
if (realservo >= 4000 && realservo <= 4120) { // ileri geri
int servo4 = realservo;
servo4 = map(servo4, 4000, 4120, 0, 120);
myservo4.write(servo4);
delay(10);
}
}
}
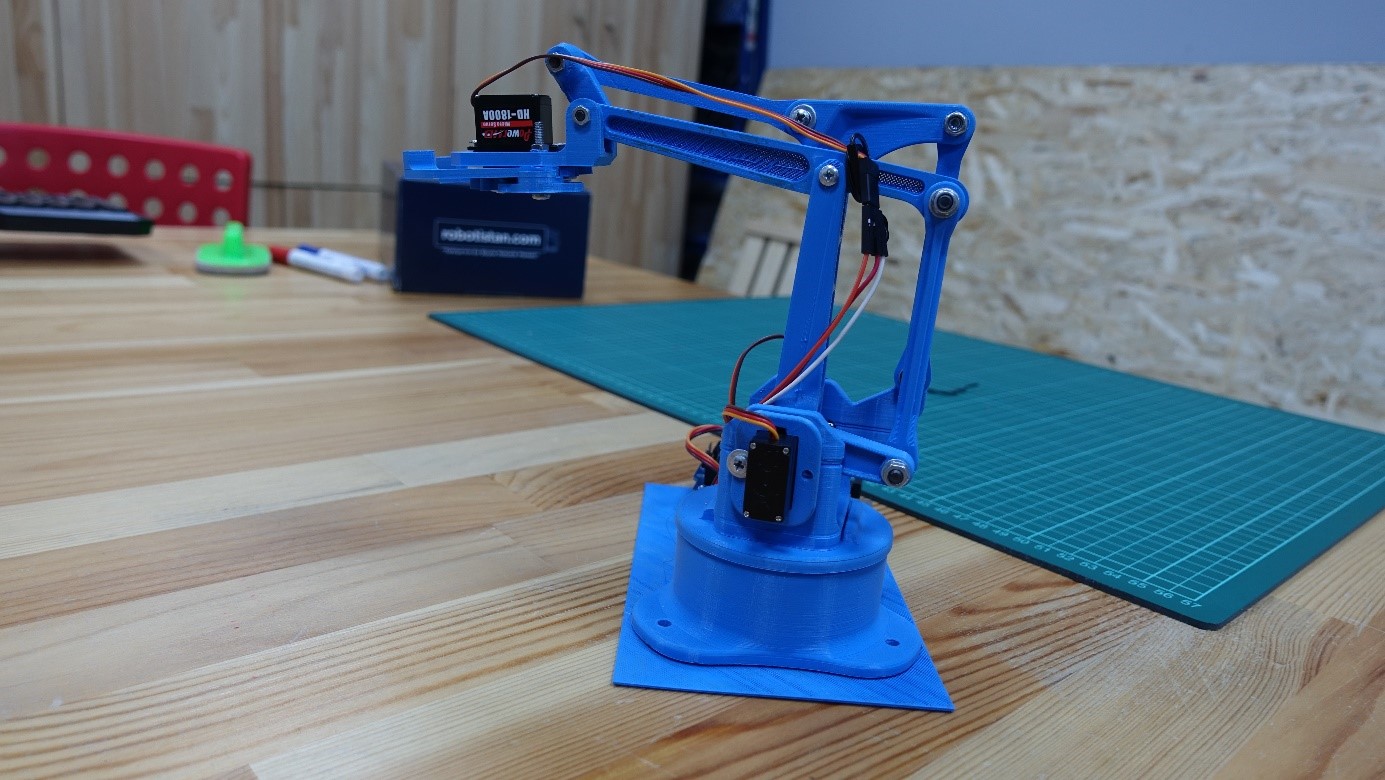
Ve bu da projemizin son hali 😊
Proje hakkında yorumlarınızı aşağıdaki ‘Yorumlar’ kısmında bizimle paylaşabilirsiniz.
Siz de yaptığınız projeleri Twitter ve Instagram üzerinden #Robotistan hashtagi ile bizimle paylaşın, projenizi hesabımızda paylaşalım !
Twitter ve Instagram Hesaplarımız: @Robotistan







çalışır halinin küçük bi videosunu yayinlayabilirmisiniz, teşekkürler
Yazımız güncellenmiştir.
Bluetooth bağlanıyor telefonla kontrol edilmiyor ayrıca kodlar doğru mu
Bluetooth için farklı bir işlem yapmam gerekiyor mu apk dosyasını sitenizden yükledim.
Eğer aduino kart yanmışsa yenisini ona göre sipariş vereceğim voltaj düşürücü olmadan 12 v 1 amper verildiğinde yanma söz konusu olur mu ?
Arduino uno ani akim veya voltaj yukseltilerine karşı kendini korumaya aliyor mu ?
Reset butonu haricinde yazılımsal veya donanımsal başka resetleme var mı ?
Tc3200 ren sensörü ekleyebilir miyim? (Renge göre nesneyi almak için)
arduino stk500_getsync() not in sync resp=0x00 bu tarz uyarılar için ne yaabilirim
Acil yardımcı olursanız sevinirim
iyi Çalışmalar.
Merhabalar yükleme sırasında bir sorun yaşadıysanız bluetooth modülünün sinyal pinlerini çıkarıp tekrar deneyiniz eğer bağlantıda bir porbleminiz oluyorsa RX pinini TX yuvasına TX pinini RX yuvasına takıp tekrar deneyiniz. Arduino 12v 1A adaptör ile çalıştırmanız mümkün eğer kartta kısa devre olmuşsa kartınız zarar görmüş olabilir. Harici bir reset butonu mümkün olduğunu düşünmüyorum. Tc3200 sensörü eklemenizde mümkün.
İyi günler
vidaların ve somonların kodunu nasıl öğrenebiliriöm ?
Proje montajı için gösterdiğimiz kaynakta vida-somun çeşitleri ve montajları mevcuttur.
Arduino Sensor Shield bağlantısının nasıl yapıldığını şema halinde, resim ya da video olarak gösterebilir misiniz?
https://maker.robotistan.com/wp-content/uploads/2017/11/sensorshieldservo.png
Örnek görsele linkten ulaşabilirsiniz.
Merhabalar iyi günler projenin arduino kodundaki
Kütüphaneler arduino nun kendi programında ekli mi yoksa biz sonradan kendimiz mi ekliyoruz ?
Merhaba, kullanılan kütüphaneler hali hazırda vardır, sonradan eklenmemiştir.
Arduino Sensor Shield ne için gerekli
Projede Sensor shield kullanım amacımız bağlantıları rahat yapabilmektir. Böylelikle fazla kablolamadan da kurtulmuş oluruz.
sensor shield i kullanmasakta olur demi
iletişim için size nasıl ulaşa biliriz bize pleksi parcalarını nereden bula biliriz.
İletişim için: [email protected] adresimize mail atabilirsiniz. Ayrıca 3B Baskı hizmeti vermemekteyiz.
Merhabalar iyi günler bir soru sormak daha istiyorum MIT app inventor programı görseldeki gibi mi yoksa görselde ki
Örnek amaçlı mı ?
Komut bloklarının bulunduğu görsel, robotun çalışması için gerekli olandır. Tasarımın bulunduğu görsel ise örnek olarak hazırlandı, tasarımı değiştirebilirsiniz.
Selamün Aleyküm Abi bu 4. servo dediğin servo nerde göremedim 2 tane altta bi tane üstte 4. yok ama 4 servo demişsin ona göre sipariş edicem senden alcam malzemeleri….
Merhaba, projede 4 servo mevcut. Sanırım görmediğiniz servo robot kolun alt tarafında olan. Detaylı görsele buradan ulaşabilirsiniz.
YAPABİLDİMİ KARDEŞ
ariuno sheild daha tam ve net bağlantılarını paylaşırmısınız?
teşekkürler
Örnek görsele linkten ulaşabilirsiniz : https://maker.robotistan.com/wp-content/uploads/2017/11/sensorshieldservo.png
Mrb,
Kolun maliyetini öğrenebilirmiyim.
Tsk
Merhaba, kullanılan devre elemanlarının fiyatlarını malzemele listesi kısmında bulabilirsiniz. Robot koldaki 3D baskı maliyeti de baskının doluluk oranına ve baskıyı aldığınız yere göre değişiklik gösterir.
,,Elimde bir adet robot kol, 4 adet servo motor ,arduino uno, bluetooth ve 9v pil var ama sizin yaptıklarınızı yapmama rağmen çalıştıramıyorum. nedeni nedir
Bağlantılarınızı ve yazdığınız programı tekrar kontrol edebilir misiniz?
tablet için yaptığınız android app i paylaşır mısınız?
Apk dosyasına buradan ulaşabilirsiniz.
çok tesekkürler
Projeniz çalıstımı
Android app yi paylaşırsanız çok sevinirim. Şimdiden teşekkürler.
Apk dosyasına buradan ulaşabilirsiniz.
Hocam program çalıştırırken hata verdi kontrol edip bidaha paylaşabilir misiniz ?
Nasıl bir sorun meydana geldi?
Arduino klon olduğu için kaynaklanan bi problemmiş onu çözdüm. Fakat bluetooth u görmüyor bağlantıları yaptığımda. Led i dahi yanmıyor neden olabilir ?
Bluetooth’a bağlanmadan önce de arduino’daki LED yanmıyor ise bir bağlantı hatası yapmış olmanız mümkün. Tekrar kontrol edebilir misiniz? Bağlantı sorunu yaşamanız da bundan kaynaklı olabilir.
Merhaba, MIT app Inventor dosyasını paylaşabilir misiniz?
Apk dosyasına buradan ulaşabilirsiniz.
Apk değilde app inventor dosyasını rica etsem… açılışta bluetooth açık değil ise açmak için uyararma olayını yapamadım o yüzden…
App inventor dosyasına buradan ulaşabilirsiniz.
Hocam Koyduğunuz videodaki shield ın bağlantı kabloları farklı gözüküyor ? Şemasını paylaşabilirmisiniz ?
Örnek görsele linkten ulaşabilirsiniz : https://maker.robotistan.com/wp-content/uploads/2017/11/sensorshieldservo.png
tüm yüklemeleri ve bağlantıları yaptığımız halde apk dan kontrol sağlayamıyoruz. Sadece breadboard üzerinde kurduğumuzda servolar tek yönlü çalışıyor. Shield üzerinde kurduğumuzda hiçbir hareket alamıyoruz. Sorun apk da ya da arduino kodunda olabilir mi ? Bi yardımcı olabilir misiniz rica etsem ?
Örnek shield bağlantılarına linkten ulaşabilirsiniz : https://maker.robotistan.com/wp-content/uploads/2017/11/sensorshieldservo.png
Bağlantıları kontrol edip tekrar deneyebilir misiniz? Bluetooth modülünün doğru çalıştığını kontrol edebilir misiniz?
Projeniz güzel çalıştırmayı başardık. Fakat telefondan kumanda ederken özelikle kolun ucunu açma kapama yaparken bütün servolar hareketleniyor.Bu sinyali nereden alıyorlar.Nasıl önlenir.
akım az geldiği için sinyaller karışıyor olabilir 2A 5V ile servo motorlarını ayrı besle yapmaz diye düşünüyorum.
Bir çalısma videosunu gmail üzerinden atabilir misiniz
shild kullanmak şartmı?ben shild kullanmıyorum.iki beslemeli yani;servoların ayrı,arduinonun ayrı beslediğimde de yapıyor.Tek besleme kullandığımda da yapıyor.
Shield kullanımı servo bağlantılarını kolaylaştırmak içindir. Shield kullansanız da aynı şekilde iki taraflı beslemeye ihtiyaç duyuyor olacaksınız.
Kolay gelsin, projeyi yapmak istiyorum fakat elimde arduino klon var çalıştırabilir miyim? Arduino araba yaparken de bazı kodları çalıştırmamisti.
Klon ile orijinal Arduino arasında işlevsel açıdan hiçbir fark yoktur. Bazı kodları çalıştırmaması gibi bir durum mümkün değildir. Klon Arduino kartlarının sürücülerini yüklemede sorun yaşadıysanız Klon Arduino UNO Sürücüleri Nasıl Yüklenir? (CH340 Çipli) isimli yazımızdan faydalanabilirsiniz.
Anladım teşekkür ederim. Peki bir sorum daha olacak. Bu kol ölçülerini büyütme imkani var mu acaba nasıl yapabilirim? Mesela uzunluğu 30 cm ise 65-70cm boyunda kol yapmak istiyorum. Daha doğrusu hoca küçük kalır büyüt dedi. Nasıl yapabilirim? Teşekkürler.
Bahsettiğiniz büyüklükteki bir robot kolu için bu projede kullanılan servolar güçsüz kalacaktır. Daha büyük servo takmak için ise daha geniş servo yuvalarına sahip bir tasarım gerekecektir.
Tekrar çizim mi yapmak gerekiyor bunun için
Evet.
kolun ucunu açma kapama yaparken bütün servolar hareketleniyor.Bir sinyal karışması var stabil bir çalışma yapamıyorum.değil.Neden olabilir.
Hocam sizinle irtibat kurabilir miyim ben sorun yaşadım çalıştırma konusunda bi yardımcı olabilir misiniz ? Bitirme Projem ve bu hafta sunmam gerekiyor.
Merhaba. Stabilite sorunu akımın yetersiz olmasından kaynaklanmaktadır. Devre şemamız güncellenmiştir ve bu sorunu ortadan kaldırmak için 5V 3A Regülatör kartı kullanılmıştır.
Birol bey ?
tayfun bey benim güç kaynağım profesyonel tip 5A sabit 5 v çıkışlı amper sorunu olmayan güç kaynaklarından.ayrıca güç kaynağına güvenmeyip bir bilgisayar güç kaynağı kullandım o da sabit 5v 3a çıkışlı da aynı sorunu yaptı
güç kaynağını tek te yapsam çiftte yapmasam olmuyor
Birol bey rica etsem robot kolunuzu ve bağlantılarını resim olarak mail atablir misiniz
tayfun bey sensör shielde ayrı arduino ya ayrı güç ile mi beslememiz gerekiyor ?
Hayır, shield zaten Arduinodan enerji alacaktır. Arduino’ya güç vermeniz yeterli.
Merhaba. İnternette hazır robot kol parçaları satılıyor. Onları kullanarak da proje uygulanabilir mi? Yoksa belirttiğiniz parçaları 3d çıktı mı almamız gerekiyor?
Robotun tasarımını dilediğiniz gibi yapabilirsiniz, hazır kit de tercih edebilirsiniz. Üzerinde çalışacağınız robot bizim örnek robotumuz gibi 3 eksenli hareket edebildiği ve tutma işlemini gerçekleştirebilecek bir uca sahip olduğu sürece proje aynı çalışır.
Teşşekkürler..
Bir sorum daha olacak kullandığımız sensor shieldın v4 ya da v5 olması fark eder mi? v5 ile de sorunsuz çalışır mı?
Fark etmez, sorunsuz çalışır.
arduıno shıeld bağlantı şemasını gönderme şansınız varmı .
Yazımız güncellenmiştir.
özellikle öğrenci arkadaşlara 3d cıktı konusunda ücretsiz yardımcı olabilirim. bana [email protected] adresinden ulaşabilirisiniz.
ARDUINO SHEILD BAĞLADIĞIM BLUETOOTH MODÜLÜ ÇALIŞMIYOR .
bende http://teknorobot.com/index.php?route=product/product&product_id=67 robot kolu var internette genellikle 4 servo lu var ama bunda 8 tane var bu kodlamayı nasıl yapıcam lütfen yardım edin öğretme kodu lazım
İyi günler bir servo motoru hareket ettirdiğimde genelde diğerlerindede ufak bir hareketlenme oluyor bir yorumda akımın yetersizliğinden dolayı demissiniz ve regülatör kartı kullandık demissiniz peki bu regülatör kartını sensör shilde nasıl bağlayacak yazıda breadboarda bağlamayı göstermissiniz.
Merhaba. Regülatör çözümünü sonradan bulduğumuzdan dolayı devre şemasını güncellemiştik. Eğer akım sorunu yaşayıp regülatör kullanıyorsanız servoları bir breadboard üzerinden arduino’ya bağlamanız gerekecektir. Bu durumda sensör shield kullanmanıza gerek kalmaz. Biz kablo fazlalığını ortadan kaldırmak için sensor shield kullandık fakat regülatör ile shield arası bağlantı yapılamaz.
çok güzel olmuş elinize sağlık hocam
Ben shild kullanmadan çalıştırdım.Çok güzel çalışıyor.Besleme kaynağı çok önemli,düzgün çalışması için cep telefonu için kullanılan taşınabilir şarj cihazı kullandım.Güç kaynaklarından verim alamadım.
merhabalar ben bu projeyi arduino due kartımla yapmak istiyorum bunun için ne yapmam gerek nasıl bir izleyebilirim?
Merhaba, if (bluetooth.available() >= 2 ) burada bahsedilen “2 hız” 2 byte lık veri olup olmadığını mı sorguluyor. Burayı daha detaylı nasıl öğrenebilirim yardımcı olur musunuz?
İyi günler daha önce sormuştum bir servo motoru hareket ettirdğimde diğerleride ediyor diye voltaj regülatörü kullanıyoruz onun için demiştiniz, gidip breadboard aldım bağlantıları yaptığımda yine aynı skıntıyı yaşıyorum lütfen yardımcı olun bu sorunu nasıll çözebilirim
AR GE pazarlarında kullanmamızda bir sakınca var mı?
İyi günler. Ben bu projeye yapıyorum ama kendim yaptığım tankın üstüne montajlayacağım kolu doğal olarak kablosuz kontrol edeceğim bu yüzden 12V adaptör yerine Pil kullanmak istiyorum peki ne tür bir pil kullanmalıyım?
En mantıklı ve pratik çözüm 3S lipo batarya kullanmak olacaktır: https://www.robotistan.com/3s-111v-li-po
robot kola benzer başka kol kullansak olurmu 3 boyutlu
merhaba bu projeyi yapıcam ama servo motorlar tower prp sg 90 mı anlamadım birde vida listesi daha açıklayıcı bir şekilde verirseniz sevinirim
11.1V lipo pil kullunıyorum ama arduino üzerinde nerereye takacağımı bilmiyorum arduino üzerindeki hangi girişe takacagım acaba
Uygun bir dönüştürücü kablo ile (örneğin: https://www.robotistan.com/t-plug-21mm-barrel-guc-soketi-donusturucu-20cm) ile Arduino üzerinde yer alan adaptör girişinden veya Vin pinini kullanarak besleme yapabilirsiniz.
Selam ben uygulamadan hareket ettirdiğimde 15 saniye sonra bluetooth bağlantısı gidiyor program donuyor
hc-05 kullanıyorum
teşekkürler
furkan arkadaşın derdi bende de oluşmaya başladı. Hem hc05 hem de hc06 denedim ama 1 dk sonra bağlantı kesiliyor.
Ufak bir sorum olacaktı acaba baskıdan çıkaracağımız parçaların teknik resmini paylaşma imkanınız var mi yada ölçüleri nelerdir paylaşabilir misiniz ?? Şimdiden çok teşekkürler emeğinize sağlık 🙂
Yazımızda projenin 3D baskı dosyalarının linki verilmiştir. Buradan dosyalara erişmeniz mümkündür.
Kolay gelsin. Yaptıklarınızın aynısnı yapıyorum fakat bir tülü çalışöıyor. MG995 servo motor aldım. Buetooth tan led vs yapıyorum çalışıyor. Başka bir kod ile bilgisayardan servoyu döndürebiliyorum. Fakat telefondan bir türli dönmüyor. Ne yapmam lazım.
SLM iyi günler ben mitt app inventor programında uygulama oluşturması nasıl oluyor yardımcı olurmusnuz. çok ama çok az zamanım kalmış projemi tamamlamam lazım bir an önce . Yardımcı olursanız çok ama çok memnun kalırım .
Sensor shield ile servo motorların 4unun de baglantilarini atar misiniz bir de hangi servo motor hangi pinlere baglanacak belirtmemissiniz
Servo bağlantıları ve shield görsellerine tıklayarak ulaşabilirsiniz.
Hicbir degisiklik yapmada direk yukarida sizin yaptiginiz gibi baglantilari yaparak ve sizin yapmis oldugunuz apk’yi kullanarak robotu calistirabilir miyim? Breadboard ve sensor shield ile denedim ama bluetooth baglanmasjna ragmen kol hareket etmiyor en ufak bir hareketlenme bile olmuyor
Hocam altındaki platform 360 derece dönebiliyor mu?
merhabalar bu işi programlama kodlama bilmeden yapabilir miyim acaba?(sadece elektronik bilgim var)
Programlama bilmeden yalnızca kopyala-yapıştır ile projeyi gerçekleştirmeniz mümkün, fakat bu durumda projenin sizlere herhangi bir öğretisi olmayacaktır. Tavsiyemiz, projelerden önce Arduino Dersleri serimizi takip etmenizdir. Teşekkür ederiz.
cevap için tşk. ederim.Ben arduino dersleri alabilecek durumum yok keşke alabilsem =( .ABS hastası bir arkadaşımız 3d yazıcı temin etti ve ardından bana teklif ettibu işi yapabilirmisin diye, Bende bir şey diyemedim Parçalarıda sipariş etmiş sanırım daha sonra ingilizce terimlerle arattığımızda nette uygun fiyatlı bulduk olmaz ise sanırım hazır satın alıcaz.
Merhabalar. Öncelikle paylaştığınız bilgiler için robotistan ekibine teşekkür ederim. Projeyi bitirdim yalnız ufak bir sorunum var. servo4(ileri geri) orijinde durmuyor yani başlangıçta en geri durumda başlıyor ve bu yüzden hareket çok kısıtlı oluyor.Az bir miktar ileri gidebiliyor. Bu problemi nasıl çözebilirim? Teşekkür ederim iyi çalışmalar.
Merhabalar. Mobil uygulamada servo4’ün kontrolünü sağlayan slider’ın “Thumb Position” kısmından uygulamanın açılışında verilen sinyal değerini değiştirerek tekrar deneyebilirsiniz. Bunun dışında Arduino programındaki “servo4 = map(servo4, 4000, 4120, 0, 120);” satırında, 0-120 olan açı aralığını 10-130 gibi 120 derece bandında başka değerlerle değiştirerek deneyebilirsiniz. Sorun servonun açılarıyla ilgili olabilir. Bunun haricinde robot kolun mekanik aksamında bir sıkışma olabilir ve servo rahat hareket edemeyebilir.
Bu projeyi yaptim ve bilgisayardan usb ile besliyorum onun yerine powerbank kullanabilir miyim kullanabilirsem minimum kac V ve kac Amper’lik powerbank kullanmam gerekir
bu robot kol toplam kaç gram kaldırabiliyor?
Öğrenme fonksiyonunu eklemek istesem nasıl yapmalıyız
Bu formda bluetooth ile kontrol edilen fakat hareket kopyalayan bir kol yapmam gerekiyor yardımcı olur musunuz kodda nasıl bir değişiklik yapmam gerek ?
Bluetooth kartı calışmtıramadık
iyi günler MIT app’in blocklarını paylaşabilir misiniz?;)
regülatoru bağladım ancak herhangi bir hareket yok
hocam buna teker eklesem aynı android programından nasıl kontrol ederim?
süper elinize emeğinize sağlık
süper
abi hareken eden birşeyi takip edebilen bi sensör varmi?
motorlar yardımıyla
Hocam selamlar, paylaşım için çok teşekkürler. Montaj için verdiğiniz sitede brass pipe diye bir ürün var siz onun yerine ne kullandınız acaba biz bulamadık 4mm boru.
merhaba önce kurulumda arduino aletlerini mi yapıyım yoksa 3d çıktıları mı birleştireyim?
merhaba mit inventor uygulamasının tarasım bölümünün tam ekran fotoğrafı mevcutmudur bluetooht da sıkıntı yaşanıyor.
Met ap invertor 2 de o nu nasil yaptin videosu varsa yapilirken nerden bulabilirim o videoyu
Merhaba robot kolu yaptım ama servolar kendi kendine haretket edio bunu nasil duzeltebilirim
merhaba bizim robotumuz kısıtlı hareketleri yaptıktan sonra error 516 broken pipe hatası veriyor yardımcı olabilir misin
slm
5v3a regülatör çalışmasının bağlantısını atarmısınız
apk yı bilgisayara yükleyebilirmiyim
Bu projeyi yapmak için 3d baskı şart mı ? Malzemeleri yerleştirecegimiz ana mekanizmasını nasıl yapabiliriz, maki renkte olan kısmı yani.
elinize yüreginize saglık cok güzel anlatmışssınız.
Kolay gelsin. Ben de bitirme projesi olarak bu projeyi ypiyorum. Projeyi yaptim fakat motorlarda cok hareketlilik var. Ne onerirsiniz ne yapabilirm. Aynen dediginz gibi 12V adaptor ve 5v-3a regulator kart kullandim. Mesela sag sol yapinca diger motorlarda da titreme hareketlenme vb oluyor. Ne onerirsiniz acaba
iyi günler bluetooth yerine kızıl ötesi kumanda kullansam bi sıkıntı olurmu ve shield gerektirirmi
Arduino Sensor Shield Kullanmadan yapılamazmı
Devrenin amacı nedir
bunu youtube kanalında video yapar mısınız teşekkürler
Selamlar, sersör shield ve voltaj regülatörü olmadan da bu proje yapılabilir mi?
Yapılabilirse nasıl yapabilirim, bu konuda yardımcı olursanız süper olur. İyi çalışmalar.
Merhaba videodaki parçaların teknik resimlerine ulaşma imkanım var mı? Ölçüleri lazım kendim çizmek istiyorum.
Thumb position nedir app inventor da
Error 516: Unable to write : Broken pipe…. Şeklinde bir hata mesajı alıyorum. Neden olabilir
Error 516: Unable to write : Broken pipe…. Şeklinde bir hata mesajı alıyorum. Neden olabilir?
Shield kullanalım mı? Kullanmayalım mı? Shield kullanacaksak. Bağlantı şekli nasıl olacak
unsigned int realservo = (servopos1 * 256) + servopos;
kodlarını açıkları mısınız burda yapılan matematiksel işlemin mantığı nedir derste anlattığımdan dolayı öğrencilerime tam açıklama yapmak istiyorum kodda anlamadığım tek kısım bu ondan soruyorum
paylaşımınız için teşekkürler
Elimizde bu projenin yapılmış hali mevcuttur bilgi almak için iletişime geçin
ben de projeyi yaptım ama bir türlü çalıştıramadım yardımcıolabilirmisin
HC 06 modülü telefonda görünüyor ama eşleşmiyor napmalıyım
Merhaba ben bu projeyi bitirme ödevi olarak yapıyorum ancak Tut/Bırak bölümünde bir sorun var çalışmıyor diğer motorlara sinyal yollayıp titretiyor ama o bölümde bulunan servo motoru çalıştırmıyor yardımcı olur musunuz?
Servo motoru ayrı bir şekilde kontrol etmeyi denediniz mi acaba?
ben plastik gövdeyi tahtadan yapacağım gövdedeki her parça kaçar santim bilginiz varmı ?
gövdede ki plastik parçalar eni botu kaç cm bilginiz varmı ?
gövdede ki plastik parçaların her birinin eni ve boyu kaç cm yardımcı olurmusunuz ?
Merhaba iki sorum olacak
Servo motorların açıları ne olmalı ?
Mesela 360 derecelik alsak 180 derece gibi çalıştırabilir miyim ve bu durum daha iyi bir sonuç verebilir mi
İkinci sorum gripper nesneyi yakaladığı anda LED yakmak istiyorum nasıl yapabilirim teşekkürler