Jiroskop Nasıl Çalışır
Açısal hızı ölçmeye yarayan jiroskop, coriolis etkisi ile çalışır. Coriolis etkisi rüzgar ve su akıntılarının saat yönünde ve tersinde dönmesine sebep olan etkidir. Dünyayı jiroskop sensörü gibi düşünürsek, coriolis etkisini jiroskopumuzda da gözlemleyebiliriz. Bu etkiden değer nasıl değer okunduğunu anlamamız için bir önceki yazımızdaki kutu modeli yetersiz kalıyor. Sizinde kafanızı karıştırmamak için bu modellemeyi bir sonraki yazıma bırakıyorum.
Matematiksel Modelleme
Burada bir önceki yazıda akselerometrede kullandığımız kutu modelini kullanmayacağız. Direk 2. akselerometre modelimizden başlayacağız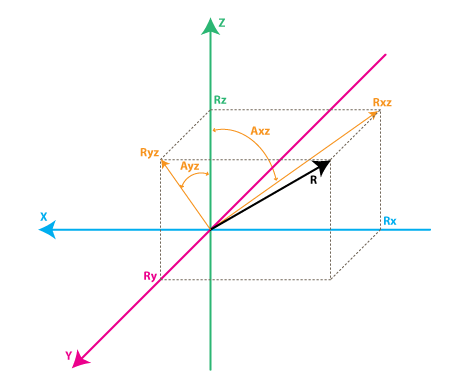
Her bir jiroskop kanalı belli bir eksenin etrafındaki dönüşü ölçer. Örneğin 2 eksenli jiroskoplar sadece X ve Y ekseni etrafında dönüşleri ölçer. Aşağıdaki formülleri anlamamız için bir kaç açıklamada bulunmamız lazım.
Rxz- Eylemsizlik kuvvetinin oluşturduğu R kuvvetinin XZ düzlemine izdüşümü
Ryz- Eylemsizlik kuvvetinin oluşturduğu R kuvvetinin YZ düzlemine izdüşümü
Rxz^2 = Rx^2 + Rz^2
Ryz^2 = Ry^2 + Rz^2
Bu izdüşümlerin Z ekseni ile yaptığı açılarada Axz ve Ayz diyelim.
Jiroskopun açısal hızı ölçtüğünden bahsetmiştik. Eğer sistemimizi Y ekseninde çevirirsek Axy açısı değişir. İlk durumdaki açıya Axy0, ikinci durumdaki açıya Axy1 dersek. Açısal hız şu şekilde ifade edilebilir:
RateAxz = (Axz1 – Axz0) / (t1 – t0)
Sensörden alacağımız değerleri dönüş hızına çevirmek içinse aşağıdaki formülleri kullanabiliriz.
RateAxz = (AdcGyroXZ * Vref / 1023 – VzeroRate) / hassasiyet
RateAyz = (AdcGyroYZ * Vref / 1023 – VzeroRate) / hassasiyet
Vref, VzeroRate ve hassasiyet sensörün datasheetini inceleyerek elde edilen değerlerdir. AdcGyro değerleri kanallarda okunan değerdir.
Şimdi Adc modülümden okunan değerlerle bir örnek yapalım:
AdcGyroXZ = 571
AdcGyroXZ = 323
RateAxz = (571 * 3.3V / 1023 – 1.23V) / ( 0.002V/deg/s) =~ 306 der/s
RateAyz = (323 * 3.3V / 1023 – 1.23V) / ( 0.002V/deg/s) =~ -94 der/s
Bu değerler açısal hızdır. Bu değerleri örnekleme süresiyle çarptığımızda açı bilgisini elde ederiz.
Yani y ekseni mekezinde 306 der/s vex ekseni ekseninde -94 der/s hızında dönmeden bahsedebiliriz. Negatif işaret aslında negatif yönü belirtir. İyi bir jiroskop datasheetinde bu yönü belirtmelidir ama deneme yanılma ile de bulunabilir. Kodunuzdan emin değilseniz en iyi analog çıkış veren jiroskoplarda en iyi yön belirleme yöntemi osiloskopla yapılır.
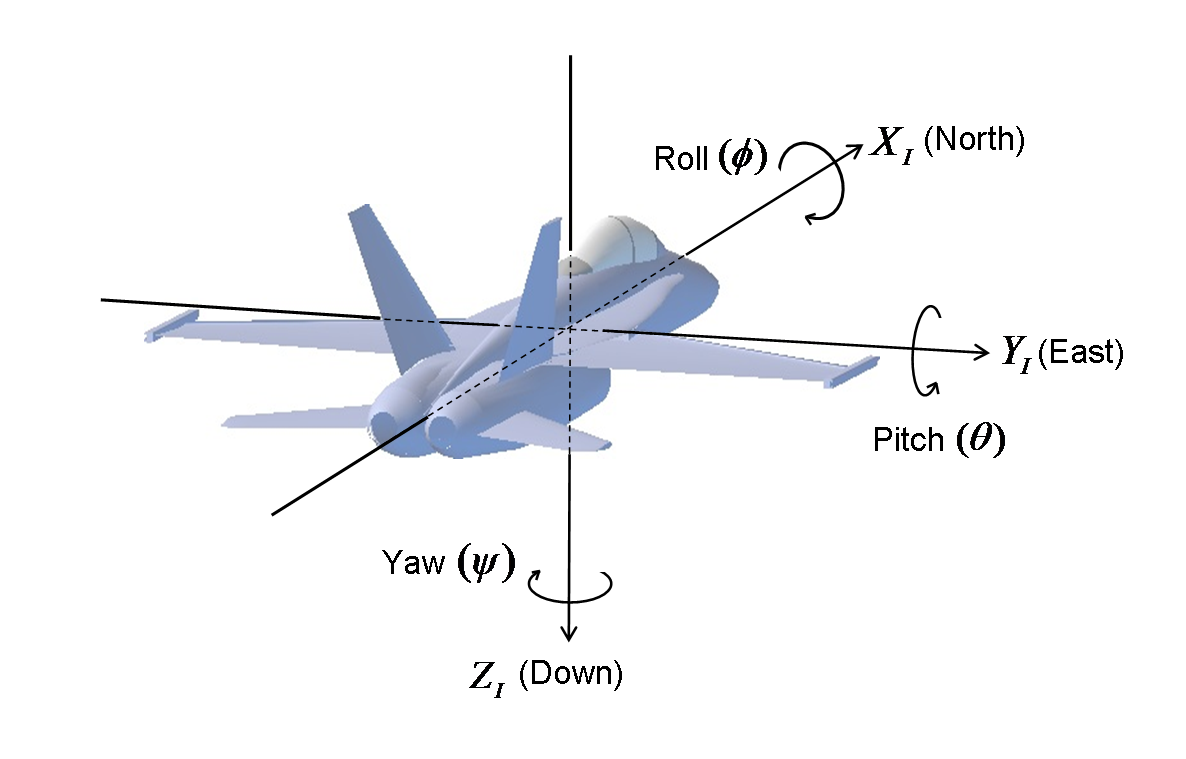
Yaw-Pich-Rol = X-Y-Z
Kaynaklarda ve örnek kodlarda x y ve z eksenleri aşağıdaki gibi isimlendirilmiştir. Bu koordinat ekseni ve adlandırması uçaklarda kullanılır. Bu eksenleri ezberlemeniz ileri araştırmalarınız için önemlidir.







robotistan da jiroskop var mı
http://www.robotistan.com/ivmeolcer-jiroskop adresinde ve IMU kartı şeklinde (genellikle ivmeölçer + jiroskop birarada bulunur) http://www.robotistan.com/coklu-sensor-karti-imu bu adreste bulabilirsiniz.