1- Örümcek Robot Nedir?
İsminden de anlaşılacağı üzere bir örümcek gibi hareket eden bir robottur. 8 yerine 4 bacak kullanacağımızdan dolayı hareketleri birebir örümcek gibi değildir. Ayrıca 4 bacaklı olduğundan dolayı bu tip robotlar Quadruped(Dört bacaklı) olarak adlandırılır. Biz bu yazımızda bir örümcek robot projesi yaparken nelere ihtiyaç duyulduğunu ve çalışma mantığını aktarmaya çalışacağız.
2- Örümcek Robot Malzemeleri
- Arduino Nano
- Arduino Nano Sensor Shield
- 12 adet SG90 Servo motor
- HC-06 Bluetooth Modülü
- Dişi – Dişi jumper kablo
- LiPo Pil
- LiPo Şarj Devresi
- Montaj Kablosu
- Anahtar
- 3D parçalar
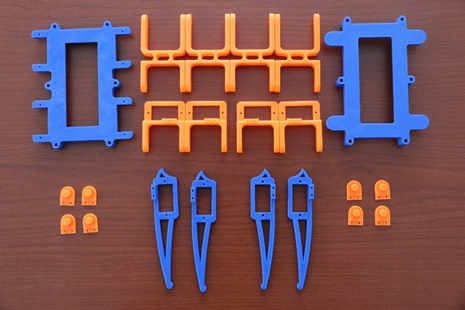
3- Örümcek Robot Montajı
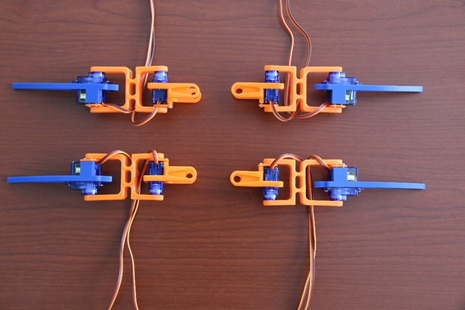
İlk olarak SG90 servo motorlarımızı 4 bacağa fotoğraftaki gibi yerleştirelim. Sabitlemek için servo motorların paketinden çıkan vidaları kullanabilirsiniz.
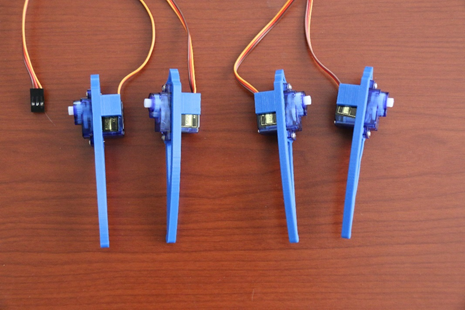
Sırada 4 tane servo motoru eklem parçalarına fotoğraftaki gibi montajını gerçekleştirelim.
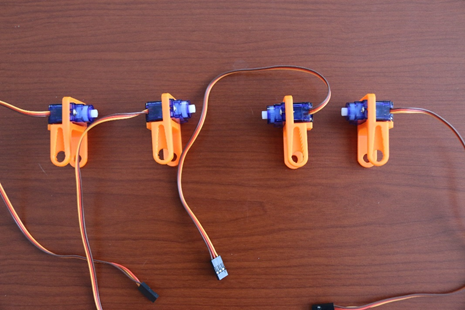
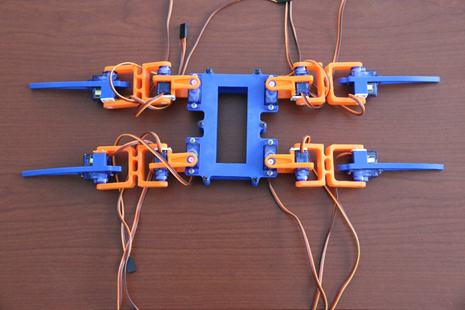
Bu adımları gerçekleştirdikten sonra robotun hareketi esnasında servoların sabit bir şekilde çalışabilmesi için gerekli olan parçaları şekildeki gibi vidalayalım.
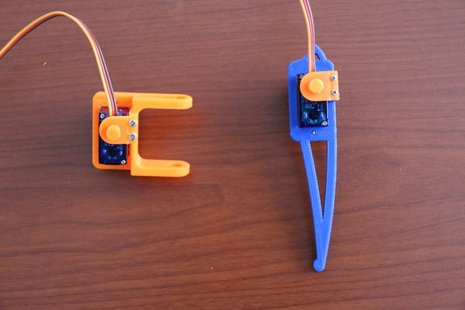
Ayakları ve eklem parçalarını tamamladığımıza göre artık bacakların montajını gerçekleştirebiliriz. Ara parçanın uzun tarafı dışa, kısa tarafı içe doğru gelecek şekilde birleştirelim. Servoların uçlarının dışarı doğru olması gerektiğine de dikkat edelim.
Bacakları, gövdeye fotoğraftaki gibi yerleştirelim. Bacakların, gövdeye montajını gerçekleştirirken bacakların simetrik olduğuna dikkat edelim.
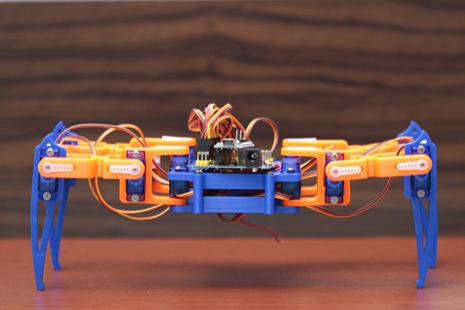
Örümcek robotumuzun gövde montajını da gerçekleştirdiğimize göre, arduino bağlantısını yapmaya geçebiliriz.
4- Arduino Bağlantısı
İlk önce SG90 servo motorun kablolarını tanıyalım.
- Kahverengi kablo: GND
- Kırmızı: Power
- Turuncu: Signal
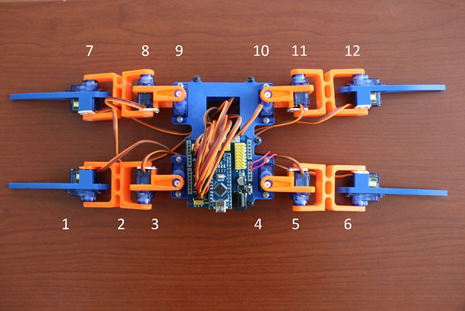
Servo motorların Arduino Nano Sensor Shield üzerindeki pinleri aşağıdaki gibi bağlanacak.
- 1 numaralı servo = 3 numaralı dijital pine
- 2 numaralı servo = 2 numaralı dijital pine
- 3 numaralı servo = 4 numaralı dijital pine
- 4 numaralı servo = 10 numaralı dijital pine
- 5 numaralı servo = 8 numaralı dijital pine
- 6 numaralı servo = 9 numaralı dijital pine
- 7 numaralı servo = 6 numaralı dijital pine
- 8 numaralı servo = 5 numaralı dijital pine
- 9 numaralı servo = 7 numaralı dijital pine
- 10 numaralı servo = 13 numaralı dijital pine
- 11 numaralı servo = 11 numaralı dijital pine
- 12 numaralı servo = 12 numaralı dijital pine
Son olarak HC-06 Bluetooth modülü Arduino Nano Sensor Shield üzerindeki pinlere aşağıdaki gibi bağlanacak
| HC-06 Pin | Arduino Nano Sensor Shield |
| RX | TX |
| TX | RX |
| VCC | 5V |
| GND | GND |
5- Kodlar
Örümcek robotumuzun asıl kodlarını yüklemeden önce servo motorları kalibre etmemiz gerekiyor.
Örümcek Robot Kalibrasyon Kodu
Yukarıdaki kalibrasyon kodlarını Arduino’ya yükledikten sonra robotumuzun bacaklarını şekildeki konumlandırıp, servo motorların içinden çıkan kulakçıkları oturtup, vidalamamız gerekiyor.
Robotumuzun kalibrasyonunu da yaptığımıza göre artık çalışması için gerekli kodları yükleyebiliriz.
6- Bluetooth Kontrolü
Örümcek robotumuzu bluetooth ile kontrol edebilmek için öncelikle aşağıdaki kodları yüklememiz gerekiyor.
Kodları yükledikten sonra seri haberleşme için kullanılacak olan komut listesi aşağıdaki gibi.
| w 0 | otur |
| w 1 | ileri |
| w 2 | geri |
| w 3 | sağa dön |
| w 4 | sola dön |
| w 5 | el sıkışma |
| w 6 | el salla |
Artık örümcek robotumuzla seri haberleşmeyi sağlayabiliriz. İsterseniz App Inventor aracılığıyla kendi uygulamanızı yapıp, robotu kontrol edebilirsiniz. App Inventor aracılığıyla uygulama geliştirmek için App Inventor dersleri adlı blog yazısına da buradan başvurabilirsiniz. Ayrıca telefonunuzun uygulama mağazasından Arduino Bluetooth Terminal uygulaması indirip indirdiğiniz uygulama üzerinden bu komutları gönderip robotunuzu kontrol edebilirsiniz.
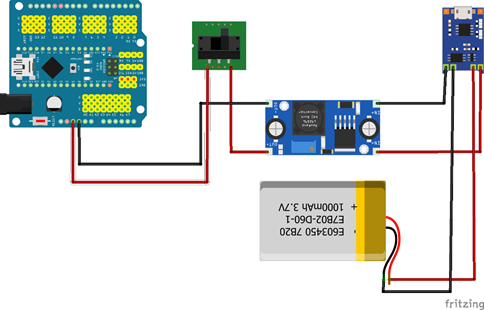
7- Güç Devresi
Robotu çalıştırabilmek için Lipo pili, lipo şarj entegresini, voltaj regülatörü ve anahtarı şekildeki gibi bağlayalım.







adamsın
merhaba robot köpek de bu kadar detay anlatım yok ya. orda malzemelerde 3D yazıcı malzemeleride yok ne yapabiliriz