Herkese selam. Bu yazıda Arduino kullanarak joystick shield ile 4WD RC araba kontrolü yapacağız. Ben yaparken çok eğlendim umarım siz de proje bittiğinde çıkardığınız işten memnun kalırsınız.
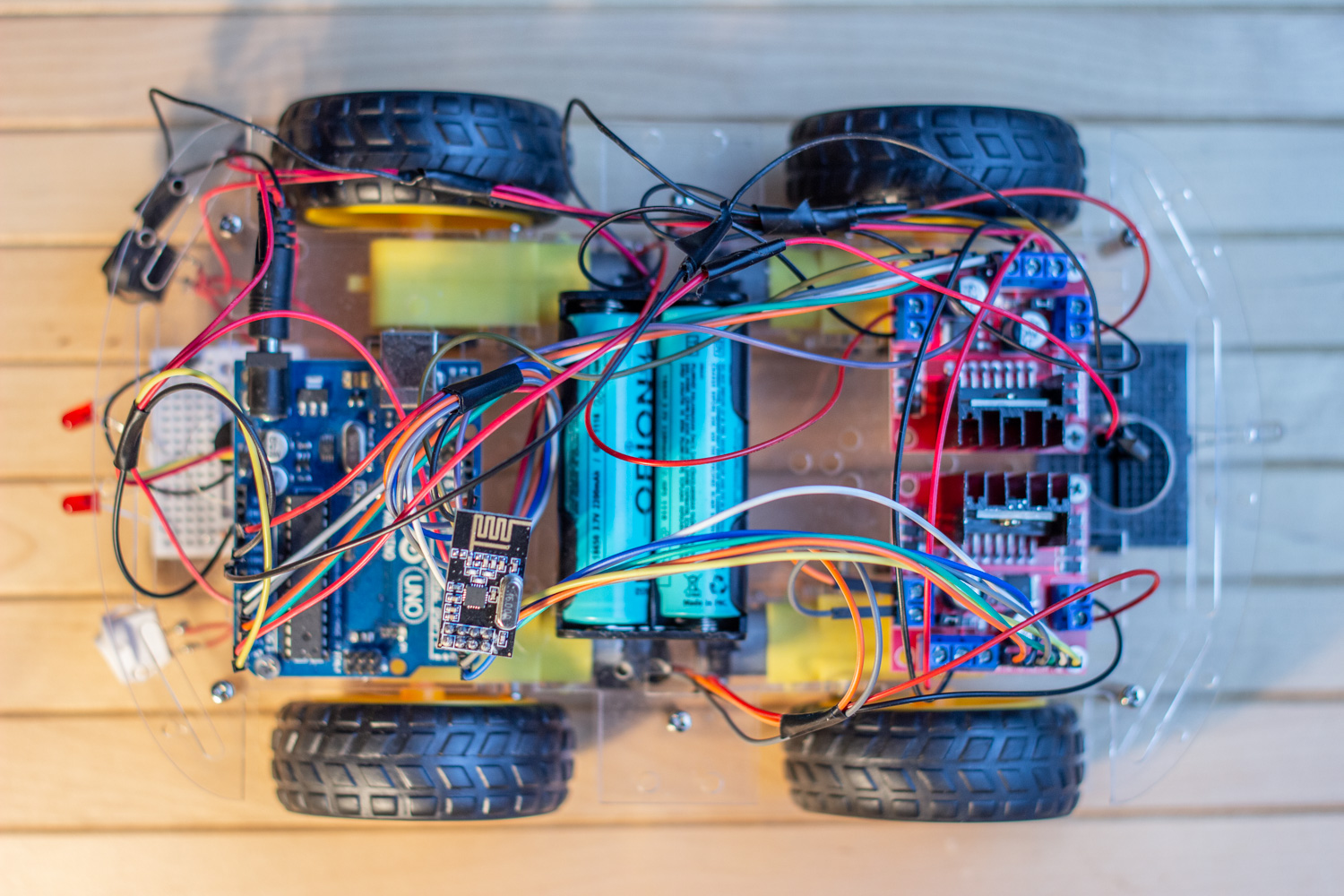
Projeye geçmeden önce belirtmek istiyorum. Uzaktan kumandalı aracımı yaparken pili bittiğinde şarj edebilmek için lityum iyon pil kullandım. Siz arzu ederseniz 9V veya 6’lı pil yuvasıyla beraber 6 adet 1.5V kalem pille kullanabilirsiniz.
Öncelikle kütüphanelerimizi indirmekle başlayalım. Bu projeyi yaparken daha öncekilerde kullandığım RF24 kütüphanesinin eski Maniacbug versiyonundaki bazı sorunları çözen bir kütüphane olan TMRh20 versiyonunu kullandım.
Daha önce farklı bir RF24 kütüphanesi indirdiyseniz lütfen onu silip yerine bu kütüphaneyi yükleyin.
RC Araba Yapımı için Gerekli Malzeme ve Parçalar
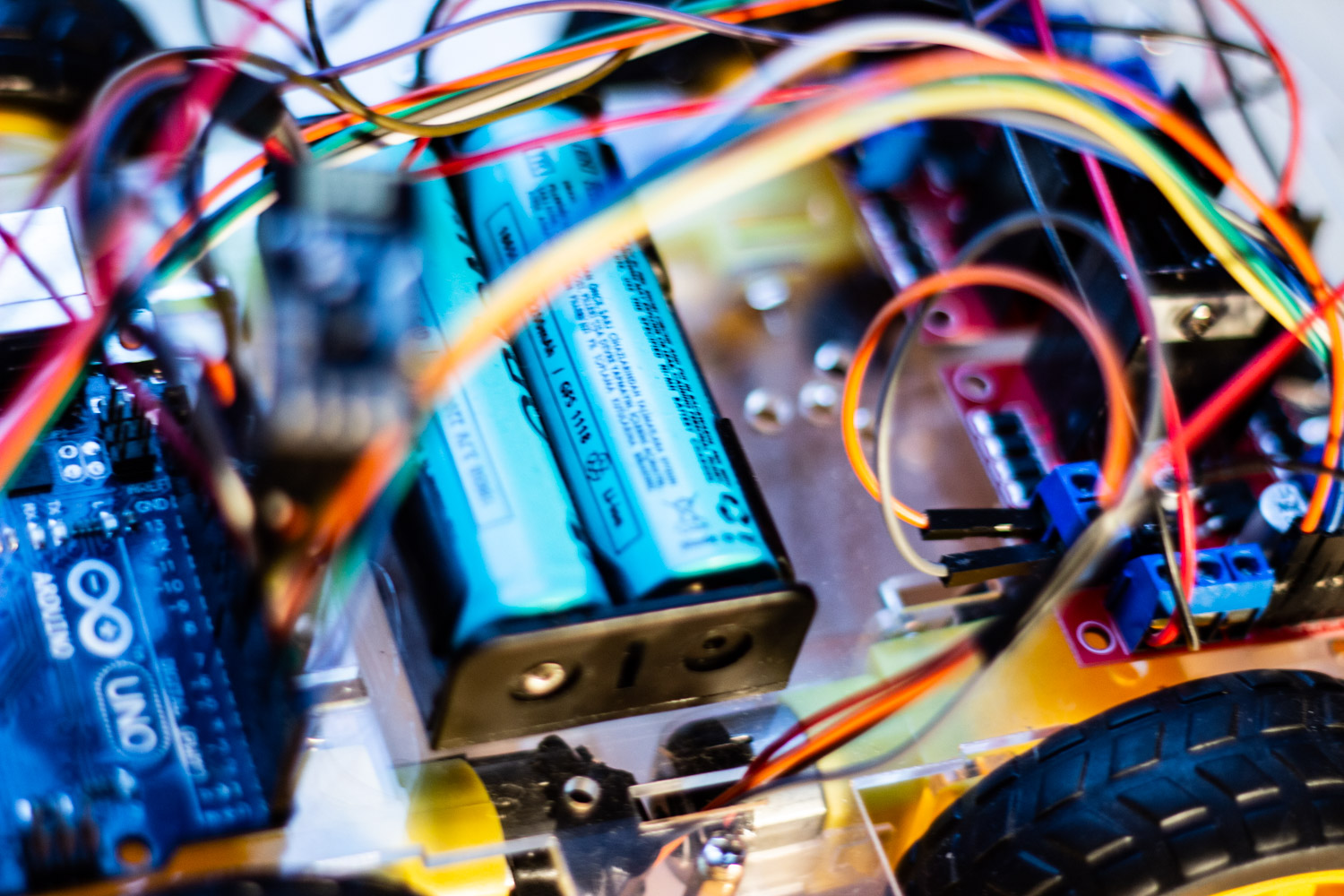
- 2 adet Arduino UNO
- 2 adet Wireless NRF24L01 + 2.4 GHz Transceiver Alıcı Verici Modül
- Arduino Joystick Shield
- 2 adet L298N Voltaj Regulatörlü Çift Motor Sürücü Kartı
- 4WD Çok Amaçlı Mobil Robot Platformu
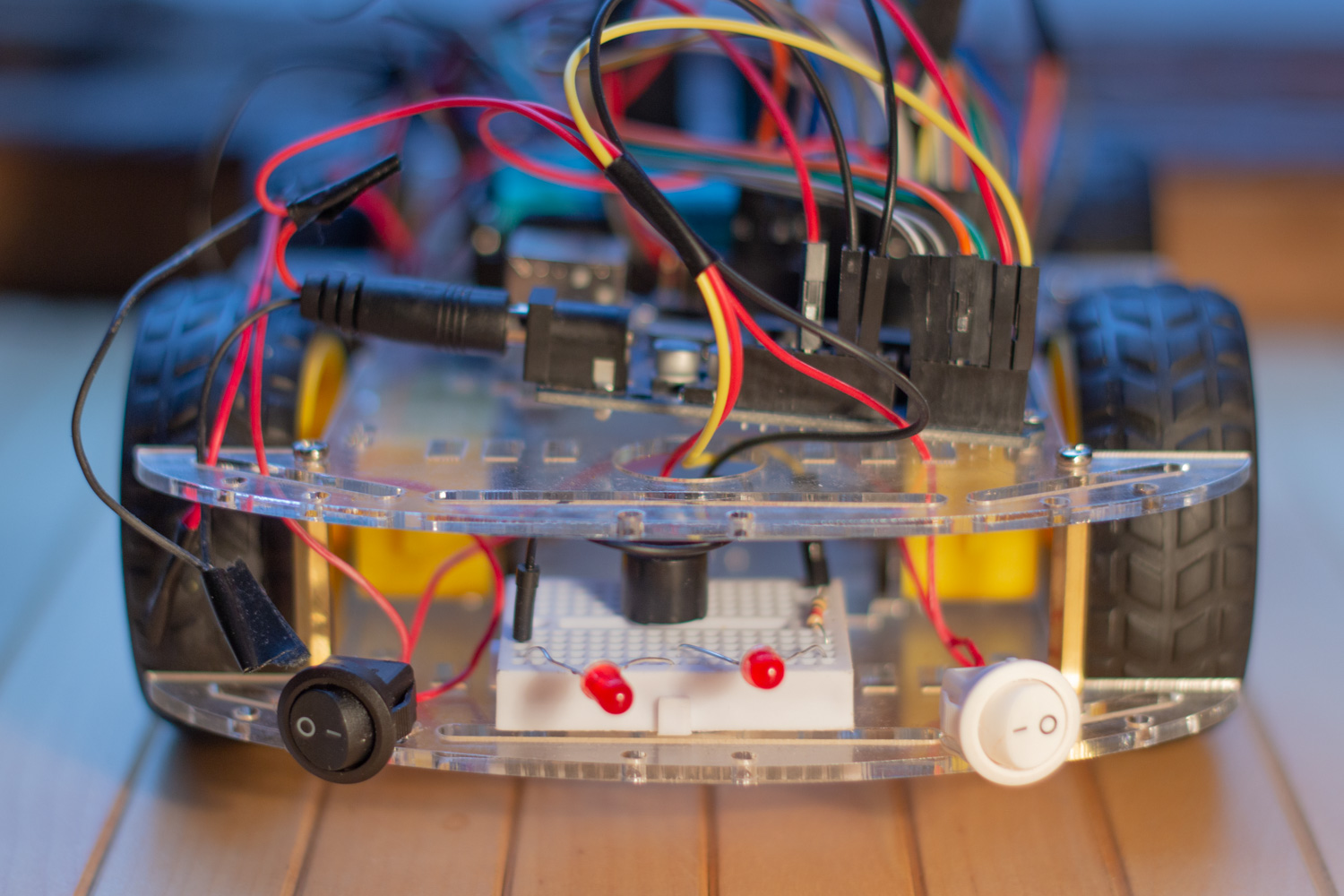
- 2 adet kırmızı LED, 1 adet beyaz LED
- 2 adet 220 ohm direnç
- 2 adet mini breadboard (mavi, kırmızı, siyah)
- 2 adet 18650 lityum-iyon pil ve pil yuvası
- Erkek erkek jumper kablolar
RC araba yapımı sırasında çokça lehimleme yapmanız gerekebilir. Bu konuda bilginiz yoksa korkmayın. Oldukça kolay bir iş. Bu videomuzu izleyerek kısa sürede öğrenebilirsiniz.
Joystick Kurulum ve Yazılımı
Joystick shield Arduino’nun üzerine oturur ve Arduino’yu basit bir kontrol cihazına dönüştürür. 7 adet düğmesi (4 büyük düğme, 2 küçük düğme ve bir joystick seçim düğmesi) Arduino’nuza eski Nintendo denetleyicileri düzeyinde işlevsellik verir. Bu birim ayrıca Nokia 5110 LCD ve nRF24L01 arayüzleri sunar.
Arduino Joystick Shield Özellikleri
- nRF24L01 arayüzü
- Nokia 5110 LCD arayüzü
- Bluetooth arayüzü
- I2C arayüzü
- Arduino ile uyumlu
- 3.5V veya 5V voltaj ayarlı
Joystick için Gerekli Malzemeler
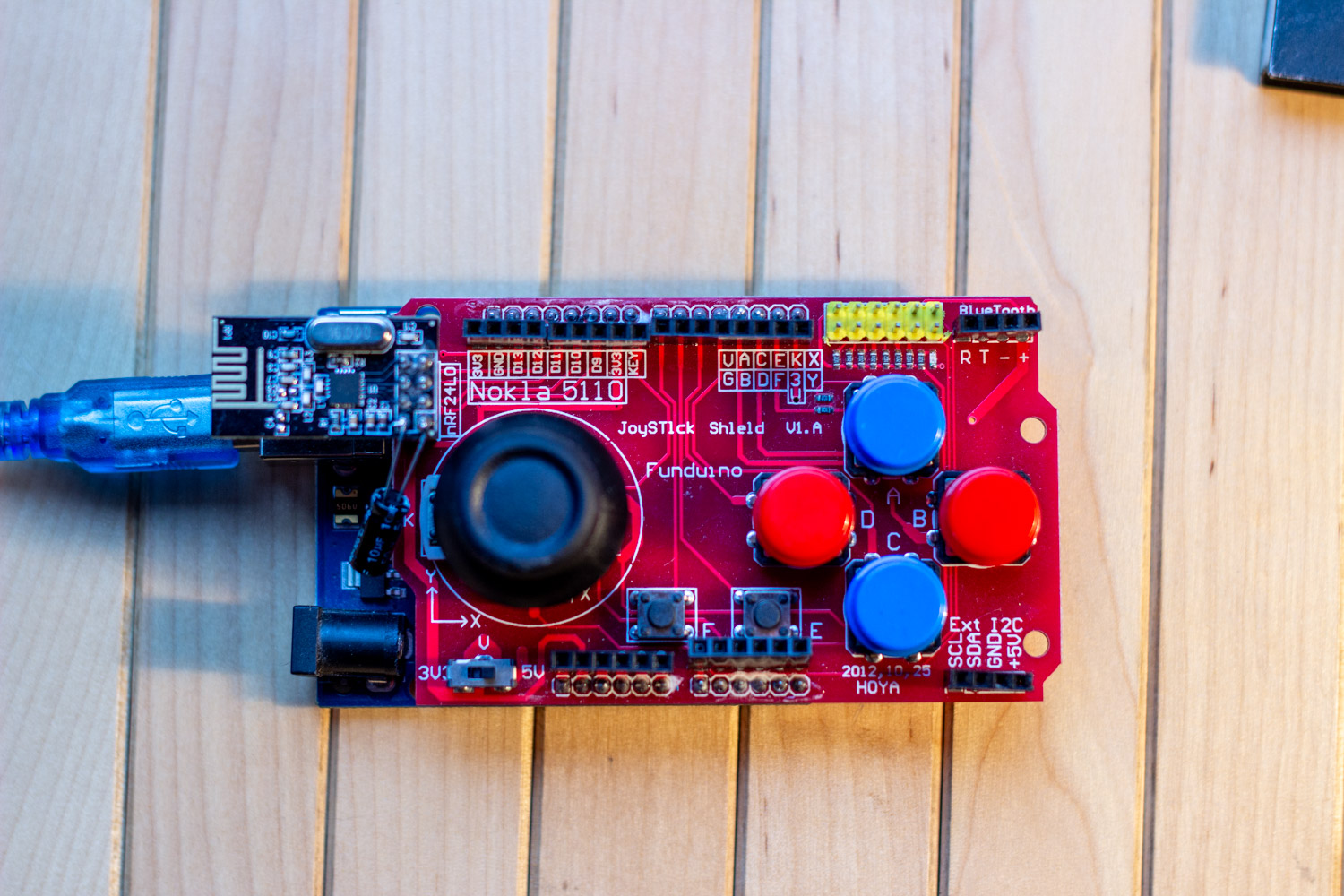
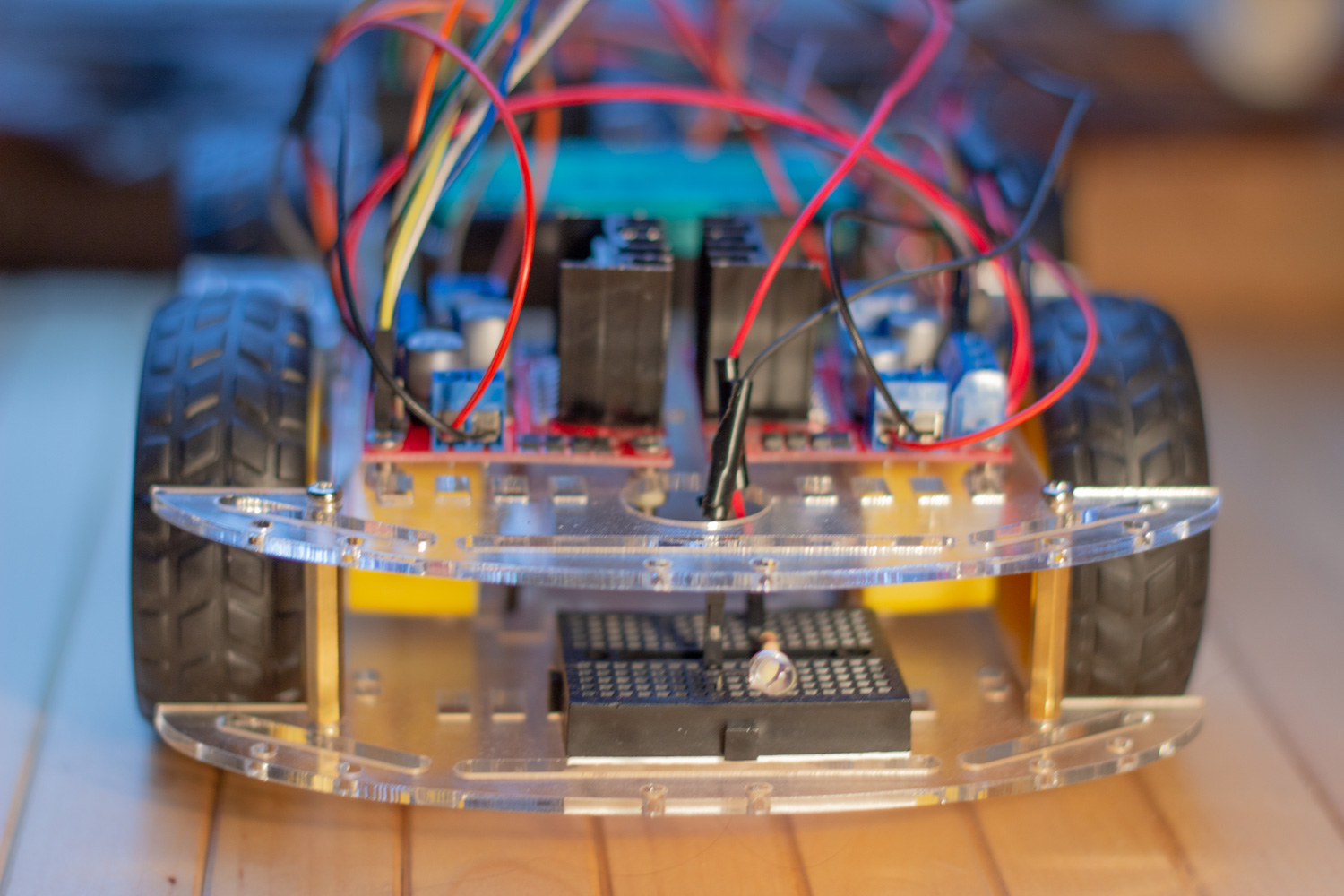
Joystick shield 4 büyük düğme, 2 küçük düğme, joystick seçim düğmesine ve iki eksenli bir joystick’e (0 – 1023 arası X ekseni, 0 – 1023 arası Y ekseni) sahiptir. Kullanımı oldukça basit ve eğlenceli bir kontrol cihazı. Ben projemde yukarıdaki düğmeyi buzzer (korna), sağ düğmeyi ön ışık (LED ve 220 Ohm direnç), sol düğmeyi arka ışık (2 adet LED ve 220 Ohm direnç) için kullandım. Diğer düğmeleri kullanmadım.
Joystick için Alıcı Kodları
/* JoyStick modulu verici kodu
- BAGLANTILAR: nRF24L01 Modulu:
1 - GND
2 - VCC 3.3V !!! 5V DEGIL
3 - CE Arduino pin 9
4 - CSN Arduino pin 10
5 - SCK Arduino pin 13
6 - MOSI Arduino pin 11
7 - MISO Arduino pin 12
8 - KULLANILMIYOR
Default Buton Pinleri:
Yukari - pin 2
Sag - pin 3
Asagi - pin 4
Sol - pin 5
-
Analog Joystick modulu
GND Arduino GND
VCC Arduino +5V
X Arduino A0
Y Arduino A1
/*-----( Kutuphaneleri ekliyoruz )-----*/
#include <SPI.h>
#include "nRF24L01.h"
#include "RF24.h"
#define CE_PIN 9
#define CSN_PIN 10
#define xAxis 14 // A0 Arduino UNO
#define yAxis 15 // A1 Arduino UNO
//const uint64_t pipe = 0xE8E8F0F0E1LL; // Pipe tanimliyoruz
/*-----( Nesneleri tanitiyoruz )-----*/
RF24 radio(CE_PIN, CSN_PIN); // Radio yaratiyoruz
/*-----( Degiskenleri belirtiyoruz )-----*/
int joystick[6]; // Joystick'in ve 4 adet butonun okunmasini tutan 6lı element dizisi
int buttonUp = 2;
int buttonRight = 3;
int buttonDown = 4;
int buttonLeft = 5;
void setup() {
Serial.begin(9600);
radio.begin();
radio.openWritingPipe(pipe);
radio.stopListening();
//Butun butonlar ve baslangic hali icin pinMode'u belirtiyoruz
pinMode(buttonUp,INPUT_PULLUP);
pinMode(buttonRight,INPUT_PULLUP);
pinMode(buttonDown,INPUT_PULLUP);
pinMode(buttonLeft,INPUT_PULLUP);
digitalWrite(buttonUp,LOW);
digitalWrite(buttonRight,LOW);
digitalWrite(buttonDown,LOW);
digitalWrite(buttonLeft,LOW);
}
void loop() {
joystick[0] = analogRead(xAxis);
joystick[1] = analogRead(yAxis);
joystick[2] = digitalRead(buttonUp);
joystick[3] = digitalRead(buttonRight);
joystick[4] = digitalRead(buttonDown);
joystick[5] = digitalRead(buttonLeft);
radio.write( joystick, sizeof(joystick) );
delay(20);
Serial.print("X = ");
Serial.print(analogRead(xAxis));
Serial.print(" Y = ");
Serial.print(analogRead(yAxis));
Serial.print(" Up = ");
Serial.print(digitalRead(buttonUp));
Serial.print(" Right = ");
Serial.print(digitalRead(buttonRight));
Serial.print(" Down = ");
Serial.print(digitalRead(buttonDown));
Serial.print(" Left = ");
Serial.println(digitalRead(buttonLeft));
}
Joystick devrenizi kurduktan sonra bilgisayarınıza takıp seri monitörden çalışıp çalışmadığını kontrol etmenizi öneririm.
Arduino 4WD RC Araba
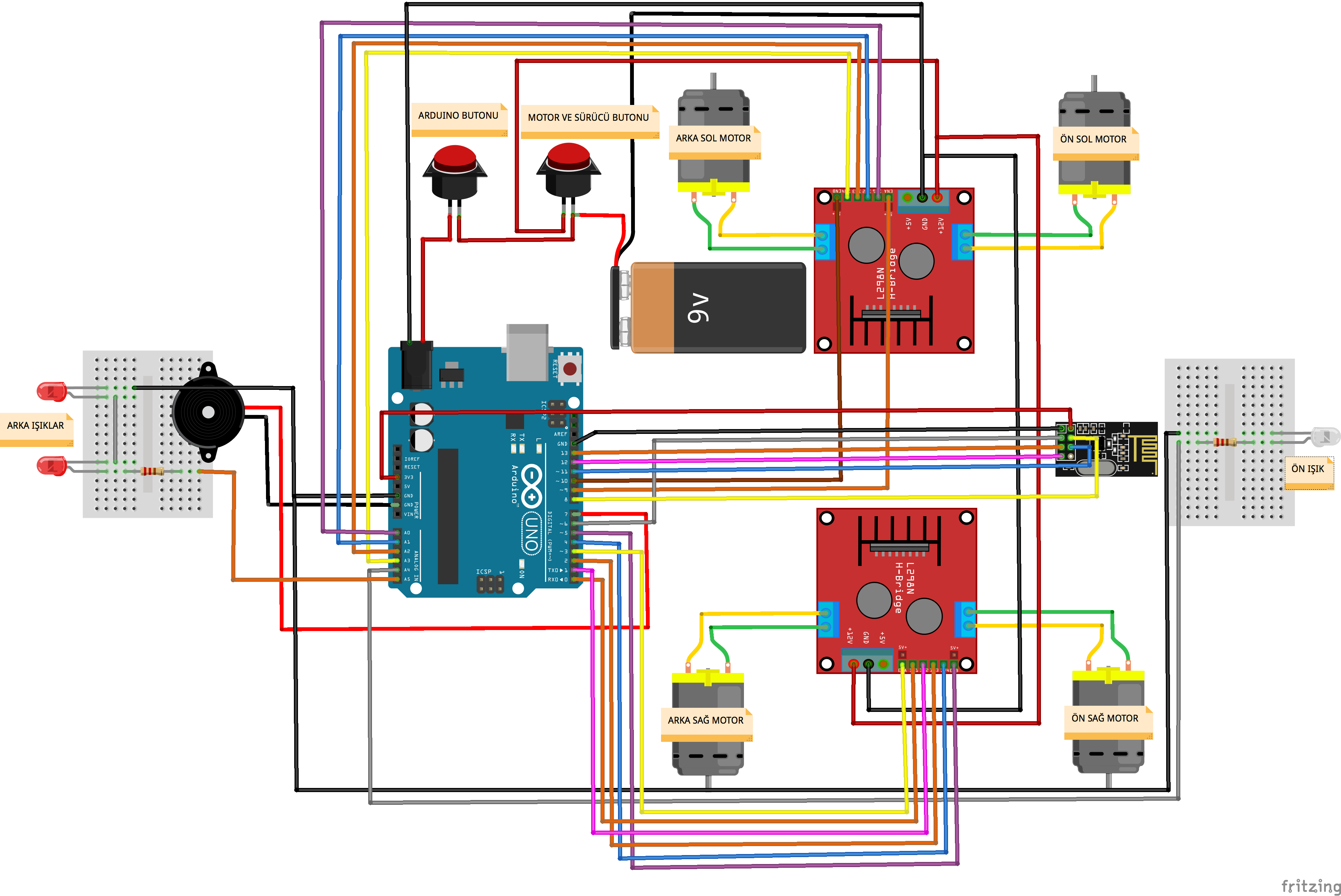
RC arabanızın bağlantılarını yukarıdaki şemadaki gibi yapın.
Not: Kodu yüklemeden önce jumper kabloları Arduino Uno kartından ayırmanız gerektiğini unutmayın. (pin 0, 1)
4WD RC Araba İçin Alıcı Kodları
/* JoyStick modulu icin alici kodu
- BAGLANTILAR: nRF24L01 Modulu:
1 - GND
2 - VCC 3.3V !!! 5V DEGIL
3 - CE to Arduino pin 6
4 - CSN to Arduino pin 8
5 - SCK to Arduino pin 13
6 - MOSI to Arduino pin 11
7 - MISO to Arduino pin 12
8 - KULLANILMIYOR
*/
//-----( Gereken kutuphaneleri ekliyoruz )-----
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
/*-----( Sabitleri ve pin numaralarini belirtiyoruz )-----*/
#define CE_PIN 6
#define CSN_PIN 8
// const uint64_t pipe = 0xE8E8F0F0E1LL; // Pipe tanimliyoruz
#define light_Front 18 //On Sag LED pin A4 Arduino Uno
#define light_Back 19 //Arka Sag LED pin A5 Arduino Uno
#define horn_Buzz 7
#define ENA_m1 3 // Motoru etkinlestir/hizlandir On Sag
#define ENB_m1 5 // Motoru etkinlestir/hizlandir Arka Sag
#define ENA_m2 9 // Motoru etkinlestir/hizlandir On Sol
#define ENB_m2 10 // Motoru etkinlestir/hizlandir Arka Sol
#define IN_11 0 // L298N #1 in 1 motor On Sag
#define IN_12 1 // L298N #1 in 2 motor On Sag
#define IN_13 2 // L298N #1 in 3 motor Arka Sag
#define IN_14 4 // L298N #1 in 4 motor Arka Sag
#define IN_21 14 // L298N #2 in 1 motor On Sol
#define IN_22 15 // L298N #2 in 2 motor On Sol
#define IN_23 16 // L298N #2 in 3 motor Arka Sol
#define IN_24 17 // L298N #2 in 4 motor Arka Sol
/*-----( Nesneleri belirt )-----*/
RF24 radio(CE_PIN, CSN_PIN); // Radio olustur
/*-----( Degiskenleri belirt )-----*/
int joystick[6]; // Joystick'in ve 4 adet butonun okunmasini tutan 6lı element dizisi
int speedRight = 0;
int speedLeft = 0;
int xAxis, yAxis;
// joystickteki 4 adet buton degiskeni
int buttonUp;
int buttonRight;
int buttonDown;
int buttonLeft;
void setup()
{
pinMode(light_Front, OUTPUT);
pinMode(light_Back, OUTPUT);
pinMode(horn_Buzz, OUTPUT);
pinMode(ENA_m1, OUTPUT);
pinMode(ENB_m1, OUTPUT);
pinMode(ENA_m2, OUTPUT);
pinMode(ENB_m2, OUTPUT);
pinMode(IN_11, OUTPUT);
pinMode(IN_12, OUTPUT);
pinMode(IN_13, OUTPUT);
pinMode(IN_14, OUTPUT);
pinMode(IN_21, OUTPUT);
pinMode(IN_22, OUTPUT);
pinMode(IN_23, OUTPUT);
pinMode(IN_24, OUTPUT);
/* Serial.begin(9600);
Serial.println("Nrf24L01 Alici Baslatiliyor"); */
radio.begin();
radio.openReadingPipe(1,pipe);
radio.startListening();
}
void loop()
{
if ( radio.available() )
{
radio.read( joystick, sizeof(joystick) );
xAxis = joystick[0];
yAxis = joystick[1];
// joystickteki 4 adet buton degiskeni
int buttonUp = joystick[2];
int buttonRight = joystick[3];
int buttonDown = joystick[4];
int buttonLeft = joystick[5];
//Serial.println(); // debugging
// Debugging kodu asagida
if (buttonUp == HIGH){digitalWrite(horn_Buzz, LOW);}
else {digitalWrite(horn_Buzz, HIGH);}
if (buttonRight == HIGH){digitalWrite(light_Front, LOW);}
else {digitalWrite(light_Front, HIGH);}
if (buttonLeft == HIGH){digitalWrite(light_Back, LOW);}
else {digitalWrite(light_Back, HIGH);}
// Y-axis One ve geriye kontrol
if (yAxis < 470) {
// Sag motorlari geriye ayarladik
digitalWrite(IN_11, LOW);
digitalWrite(IN_12, HIGH);
digitalWrite(IN_13, HIGH);
digitalWrite(IN_14, LOW);
// Sol motorlari geriye ayarladik
digitalWrite(IN_21, HIGH);
digitalWrite(IN_22, LOW);
digitalWrite(IN_23, LOW);
digitalWrite(IN_24, HIGH);
// Geriye giderken motor hizini arttirmak icin PWM sinyalini azalan Y eksen degerlerini 470ten 0a'dan 0dan 255'e seklinde ayarlayin
speedRight = map(yAxis, 470, 0, 0, 255);
speedLeft = map(yAxis, 470, 0, 0, 255);
}
else if (yAxis > 550) {
// Set Right Motors forward
digitalWrite(IN_11, HIGH);
digitalWrite(IN_12, LOW);
digitalWrite(IN_13, LOW);
digitalWrite(IN_14, HIGH);
// Set Left Motors forward
digitalWrite(IN_21, LOW);
digitalWrite(IN_22, HIGH);
digitalWrite(IN_23, HIGH);
digitalWrite(IN_24, LOW);
// One giderken motor hizini arttirmak icin PWM sinyalini artan Y ekseninde 550-1023ten 0-255'e ayarlayin
speedRight = map(yAxis, 550, 1023, 0, 255);
speedLeft = map(yAxis, 550, 1023, 0, 255);
}
// Joystick ortada kalirsa motorlar hareket etmeyecek
else {
speedRight = 0;
speedLeft = 0;
}
// Sol sag kontrolleri icin X eksenini ayarlama
if (xAxis < 470) {
// Azalan X-axis okumalarini 470-0'dan artan 0'dan 255'e ayarliyoruz
int xMapped = map(xAxis, 470, 0, 0, 255);
// Sola hareket - sol motor hizini azaltma, sag motor hizini arttirma
speedLeft = speedLeft - xMapped;
speedRight = speedRight + xMapped;
// Menzili 0 - 255 arasina ayarla
if (speedLeft < 0) {
speedLeft = 0;
}
if (speedRight > 255) {
speedRight = 255;
}
}
if (xAxis > 550) {
// Artan X-ekseni okumalarini 550den 1023'e durumundan 0'dan 255'e ayarla
int xMapped = map(xAxis, 550, 1023, 0, 255);
// Saga hareket - sag motor hizini azalt, sol motor hizini arttir
speedLeft = speedLeft + xMapped;
speedRight = speedRight - xMapped;
// Confine the range from 0 to 255
if (speedLeft > 255) {
speedLeft = 255;
}
if (speedRight < 0) {
speedRight = 0;
}
}
// Dusuk hizlarda kornayı engelle (motorlariniza gore ayarlayin degeri)
if (speedLeft < 70) {
speedLeft = 0;
}
if (speedRight < 70) {
speedRight = 0;
}
analogWrite(ENA_m1, speedRight); // A motoruna PWM sinyali gonder
analogWrite(ENB_m1, speedRight);
analogWrite(ENA_m2, speedLeft); // B motoruna PWM sinyali gonder
analogWrite(ENB_m2, speedLeft);
/* Serial.print("X = ");
Serial.print(xAxis);
Serial.print(" Y = ");
Serial.print(yAxis);
Serial.print(" Up = ");
Serial.print(joystick[2]);
Serial.print(" Right = ");
Serial.print(joystick[3]);
Serial.print(" Down = ");
Serial.print(joystick[4]);
Serial.print(" Left = ");
Serial.println(joystick[5]); */
}
}
Tüm adımları doğru yaptığınızdan emin olduktan sonra RC arabanız hazır!
Video için takipte kalın. Görüşmek üzere. 🙂







2 haftadır üzerinde çalıştığım projeyi yapmanız mutlu etti teşekkür ederim
İşinize yaramasına sevindim. 🙂
Merhaba
Aracın kodunu derlerken hata verdi aşağıda verdiği hata ve satırda mevcut nedir acaba sorun…
‘pipe’ was not declared in this scope
radio.openReadingPipe(1,pipe);
Aynı hatayı joystick kodu da verdi…Galiba kütüphanelerim çakıştı…
Her ikisinde de aynı hatayı veriyorsa kütüphanelerin çakışmış olması yüksek ihtimal. Kütüphaneleri kontrol ettikten sonra sorunu çözemezseniz çıkan hata mesajının tamamını benimle paylaşırsanız yardımcı olmaya çalışırım tekrar.
Merhaba. Kütüphanelerinizin doğru yerde olup olmadığını ve dosya isimlerini kontrol edin. Daha önceden farklı bir RF24 kütüphanesi yüklediyseniz onu silip yazıda linkini verdiğim kütüphaneyi yükleyin.
hata buradan kaynaklanıyor basındaki // işareti kaldırım Öyle Deneyin
//const uint64_t pipe = 0xE8E8F0F0E1LL; // Pipe tanimliyoruz ————HATALI
const uint64_t pipe = 0xE8E8F0F0E1LL; // Pipe tanimliyoruz ————-OLMASI GEREKEN
Acaba açıklamaya videosunu da koyarmısınız.
pipe sorunu bendede çıkıyor ve bir türlü kütüphaneyi inidremedim bi yardım lütfen
Bu linke tıklayın: https://tmrh20.github.io/RF24/ Açılan sayfada Useful References başlığı altında download’a tıkladığınızda inmeye başlayacaktır.
download yok
hata buradan kaynaklanıyor basındaki // işareti kaldırın Öyle Deneyin
//const uint64_t pipe = 0xE8E8F0F0E1LL; // Pipe tanimliyoruz ————HATALI
const uint64_t pipe = 0xE8E8F0F0E1LL; // Pipe tanimliyoruz ————-OLMASI GEREKEN
1 Alıcı modül için arduino uno yerine arduino mega kullanmak istiyorum kodda veya devrede sıkıntı ya da değişim olur mu ?
2 Nrf24l01 yerine Pa+Lna modülünü kullanacağım, herhangi bir ön ayar yapmam gerekir mi? pinleri aynı sanırım
BENDE PİPE HATASI ÇIKIYOR VE SİZİN DEDİĞNİZ KÜTÜPHANEYİ KURDUM AYLA ÇIKIYOR NASIL ÇÖZEBİLİRİM ?
hata buradan kaynaklanıyor basındaki // işareti kaldırım Öyle Deneyin
//const uint64_t pipe = 0xE8E8F0F0E1LL; // Pipe tanimliyoruz ————HATALI
const uint64_t pipe = 0xE8E8F0F0E1LL; // Pipe tanimliyoruz ————-OLMASI GEREKEN
çok teşekkürler
Arkadaşlar Bu Hatayı Alıyorum Yardımcı Olur musunuz Kütüphaneyi Yükledim Ama Nafile Olmadı.
C:\Users\Admin\Desktop\sketch_apr03a\sketch_apr03a.ino: In function ‘void setup()’:
sketch_apr03a:28:25: error: ‘pipe’ was not declared in this scope
radio.openWritingPipe(pipe);
^
exit status 1
‘pipe’ was not declared in this scope
Kodların ikisinde de alıcı yazıyor.Doğru olanları buldum fakat kodunuz hatalı.Hataları düzletmeye çalıştım ama alıcı ile verici eşleşmiyor.Bence kodu bir elden geçirip deneyin.
herşey takılı olduğu halde arabayı kontrol edemiyorum kumanda bilgisayara bağlı arduino 9v luk pilden besleniyor acaba kumandayı da ayrı bir pilden beslersem düzelir mi
motorlardanmı motor sürücüdenmi ne ses çıkıyor motorlarım dönmüyor ne yapacağım video olsa yapabilirim bu yıl sınavım var uğraşamayacağım ondan son projemi yapayım diyorum yardım edin
bu proje yi 1 tane motor sürücü ile yapabiliyor muyuz
Merhabalar elinize sağlık ben sizin sistemi kullanmadım farklı bir sistemle yaptım fakat oluşturduğum joyistick ile rc araba arasında bağlantı kopukluğu yaşanıyor. Bunun sebebi ne olabilir yardımcı olursanız sevinirim. İyi çalışmalar.
4 motoru 1 l298n motor sürücü ile yapsak olmaz mı?
Devre birebir yapılırsa çalışıyor. Dikkat edilmesi gereken nokta (Bende 3 gündür uğraşıyordum) L298n Motor sürücü ile arduinoyu aynı toprak hatta bağlamak. Yoksa devre çalışmıyor, lambalar yanıyor ama.
hala çalışmıyor yardım eder misiniz
2wd arabaya nasıl uyarlayabilirim ?
merhaba,
bütün bağlantıları ve programları 2 kere kontrol etmeme rağmen çalıştıramadım. Programları değitirmeden ilk yüklediğimde sağdaki arka motor durmadan çalışıyor ve joystick’i ileri haeket ettirdiğimde sadece sağ tekerler çalıştı.Kumandanın seri portunda okuduğum değerler 0-671 arasında. 330 değer ortada gözüküyor. bunlara göre yeniden ayarladığımda hiç çalışmadı. Sorun ne anlamadım…
benimde öyle lütfen yardı edin acil
Not: Kodu yüklemeden önce jumper kabloları Arduino Uno kartından ayırmanız gerektiğini unutmayın. (pin 0, 1)
yazıda belirtiğniz bu notu açıklar mısınız ? yüklemeden önce ayıracaksak neden bağlıyoruz?
Merhaba, bu pinler aynı zamanda Arduino’ya kod yüklenmesi esnasında seri haberleşmesiyi sağlayan pinlerdir. Kod yüklemesi sırasında pinler bağlı olursa kodun yüklenmesinde sıkıntı çıkacağından 0. ve 1. dijital pinlere bağlı herhangi bir şeyin bulunmaması gerekiyor. Yalnızca kod yüklerken yaptığımız bir işlem. Kodu yükledikten sonra tekrar bağlantı yapabilirsiniz.
Elimde sadece joystick kolu var. İki adet hc-05 Bluetooth modülü ile aracımı kumanda edebilir miyim? Bunun için çok örnek proje aradım ama bulamadım. Yardımcı olabilir misiniz?
Arabayı yaptım ama korna çalışıyor ışık çalışıyor araç haraket etmiyor 2 kere uno 2 kere motor sürücü kartı değiştim kablolarda sağlam yardımcı olursanız sevinirim.
Merhabalar, arabanın ön beyaz LED’inde bir bağlantı hatası var, onu düzeltirseniz çok sevinirim.
Selamlar,
Teşekkürler. Nasıl bir hatadan bahsediyorsunuz acaba?
İyi çalışmalar dileriz 🙂
Beyaz Led in GND hattı tam bağlanmamış ve kodda 34. satırda en baştaki kodun yorum satırını kaldırır mısınız
Selamlar,
Bahsettiğiniz şemada maalesef hata bulamadık. GND hattı geldikten sonra iki parçaya bölünmüş ve yine GND hattına bağlanmış.
İyi çalışmalar dileriz 🙂
Beyaz ledin bağlı olduğu breadboard da gnd hattı beyaz ledin gnd hattında iletimde değil ama iletimde gibi gözüküyor
bir de l298n pinlerini analog pinlere bağlasam bir sıkıntı olur mu
robotistan destek yardım eder misin herşeyim tam ve sağlam ama çalışmıyor
Tabii.
Tam olarak ne hatası alıyorsunuz?
Birimleri test etme imkanı buldunuz mu acaba?
L298N pinlerini analog çıkışa bağlayabilir miyim sıkıntı olur mu
Merhaba Bu motorlar yerine iki adet 12V 4000 rpm iki adette sizin kullandığınız 6V 250 rpm motor kullansam olurmu acaba ?
Merhaba bu motorlar yerine 6V 4000 rpm motor kullansam olurmu
pardon yanlış yazmışım https://www.robotistan.com/12v-12mm-4000-rpm-reduktorlu-dc-motor
şu motordan 4 tane kullansam olurmu
Tabii, kullanabilirsiniz.
Çok teşekkürler benim iade isteğimede siz geri dönüş yapmıştınız
Rica ederiz, bizler sizin için buradayız 🙂
Merhabalar L293 Sürücü kartıyla nasıl bir kodlama yapabiliriz ve bağlantı şeması nasıl değişir. bir sorum daha olacak devrede kullandığımız 2 adet L298N kartı 1 adet kullansak olur mu.
İlk önce pinleri bilmeniz gerekiyor. Pinlerin ne işe yaradığını anladıktan sonra bağlantıları yapmalısınız. Bağlantıları yaptıktan sonra mantık çoğunlukla aynıdır. Sadece bir kaç pine bilgi gönderirsiniz 🙂
Hangi pine, ne göndereceğinizi bilmeniz için bizim yaptığımız uygulamadan da ilham almanızı tavsiye ederim. Yine bir sorunuz olursa buradan yazabilirsiniz.
iyi günler acaba video gelecek mi?
Bu iş ile hobi amaçlı ilgileniyorum. Arduino Pro Mini 5V ile de aynı proje çalıştırılabilir mi? Bence bir mahsuru yok ama bilgilendirirseniz sevinirim
Tabii, çalıştırabilirsiniz.
Deneyap kart versiyonu gelir mi?
merhaba benim kodlarımda şu satırda hata veriyor radio.openWritingPipe(pipe); sorun nedir yardım edebilirmisiniz
aynı sorun kumandada da oluyor lütfen yardım
pipe satırında hata veriyor
Ardunio joystick shield a kondansatör takmamak çalışırmı