RC projelerimizde kullanabilmek için bir RC kumanda tasarlayacağız. Projemizin kalbinde Arduino Nano yer alıcak. Radyo Kontrolünü nRF24L01 modülü ile gerçekleştireceğiz. Verici devresini 6 kanallı olacak şekilde tasarladım, çoğu projemiz için yeterli olacaktır
Gerekli malzemeler
- Arduino nano
- nRF24L01
- 3x 100nF
- 2x 10k
- AMS1117 5.0V
- AMS1117 3.3V
- 3x toggle switch
- 2x Button
- 2x 2 eksen joystick
- 9v pil
- 9v pil yuvası
nRF24L01 Pinleri
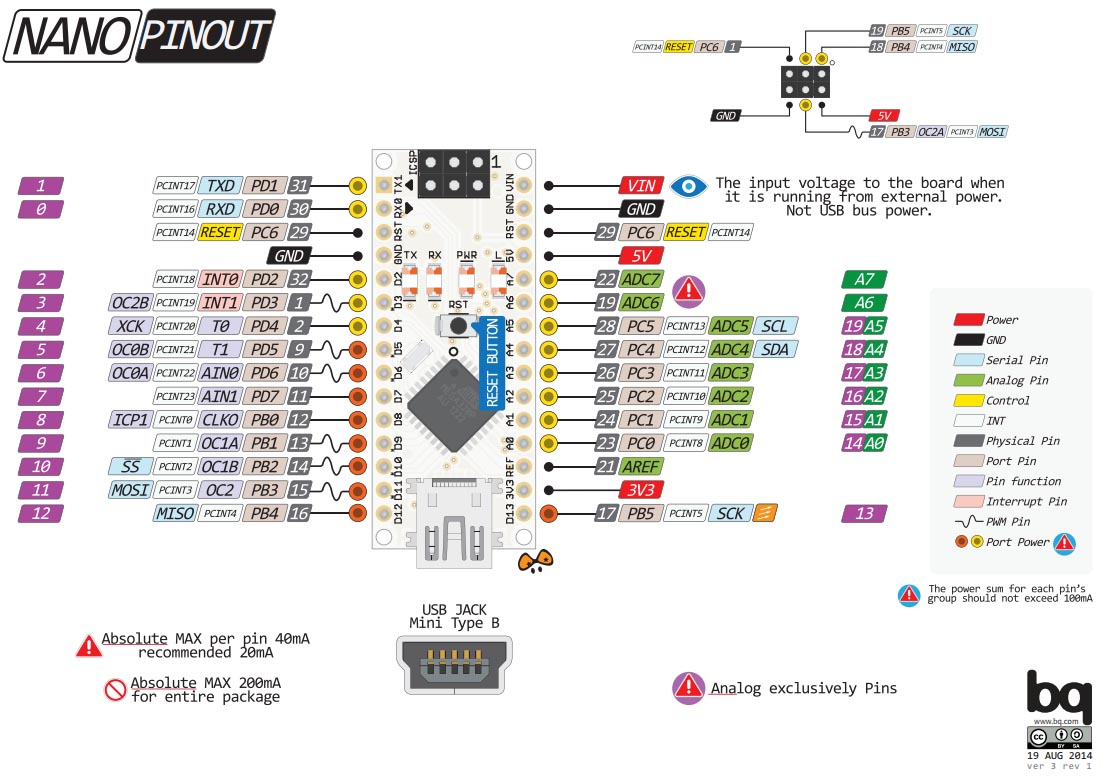
Arduino nano pinleri
STL Dosyaları
https://github.com/Robotistan/RC-kumanda
Devre şeması
kütüphane dosyası
Verici kodları
#include
#include
#include
RF24 radio(9, 10); //ce, cns
const byte address[6]= “00001”;
int button_pin1= A4;
int button_pin2 = A5;
int toggle1= A2;
int toggle2= A3;
int x_pot= A0;
int y_pot= A1;
int data[6];
void setup() {
pinMode(button_pin1, INPUT);
pinMode(button_pin2, INPUT);
pinMode(toggle1, INPUT);
pinMode(toggle2, INPUT);
pinMode(x_pot, INPUT);
pinMode(y_pot, INPUT);
radio.begin();
radio.openWritingPipe(address);
radio.setPALevel(RF24_PA_MAX);
}
void loop() {
data[0]= digitalRead(button_pin1);
data[1]= digitalRead(button_pin2);
data[2]= digitalRead(toggle1);
data[3]= digitalRead(toggle2);
data[4]= analogRead(x_pot);
data[5]= analogRead(y_pot);
radio.write(data, sizeof(data));
}
Alıcı kodları
#include
#include
#include
//ce cns
RF24 radio(9, 10);
const byte address[6] = “00001”;
int motor_data;
int motor_pin=5;
int data[6];
void setup()
{
pinMode(7, OUTPUT);
pinMode(6, OUTPUT);
pinMode(4, OUTPUT);
pinMode(3, OUTPUT);
pinMode(motor_pin, OUTPUT);
Serial.begin(9600);
radio.begin();
radio.openReadingPipe(0, address);
radio.setPALevel(RF24_PA_MAX);
radio.startListening();
}
void loop()
{
if (radio.available())
{
radio.read(data, sizeof(data)); //Veri okuması
motor_data= map(data[4],0,1023,0,255); // map komutu ile data[1] den 0 ile 1023 arası gelen değeri 0 ile 255 arasına çevirdik
analogWrite(motor_pin, motor_data); // analog olarak yazdırma yaptık
delay(5);
if(data[0] == HIGH)
{
digitalWrite(7, HIGH);
}
else
{
digitalWrite(7, LOW);
}
if(data[1] == HIGH)
{
digitalWrite(6, HIGH);
}
else
{
digitalWrite(6, LOW);
}
if(data[2] == HIGH)
{
digitalWrite(4, HIGH);
}
else
{
digitalWrite(4, LOW);
}
if(data[3] == HIGH)
{
digitalWrite(3, HIGH);
}
else
{
digitalWrite(3, LOW);
}
}
else{
digitalWrite(7, LOW);
digitalWrite(6, LOW);
digitalWrite(4, LOW);
digitalWrite(3, LOW);
analogWrite(motor_pin, 0);
}
delay(5);
}






