Merhaba arkadaşlar.
Bu yazımızda “Engelden Kaçan Robot nedir, nasıl yapılır?” konularından bahsedeceğiz.
Engelden Kaçan Robot Nedir?
Engelden kaçan robot, diğer adıyla engel algılayan robot, otonom olarak çevre kontrolü yapabilen ve hareketini önleyebilecek cisimleri atlatabilen robot tipidir.
Çevre kontrolünü sağlayabilmesi için ultrasonik, kızılötesi vb. gibi çeşitli sensörlere ihtiyaç duyar.
Arduino ile Engelden Kaçan Robot Yapımı
Ultrasonik sensör ile karşılaştığımız engelleri algılayıp buna göre yön değiştiren bir robot yapacağız.
Robotumuzun hızını ve yönünü bir motor sürücü ile kontrol edeceğiz.
Videolu anlatımla dinlemek isterseniz, videomuza buradan ulaşabilirsiniz:
Gerekli Malzemeler
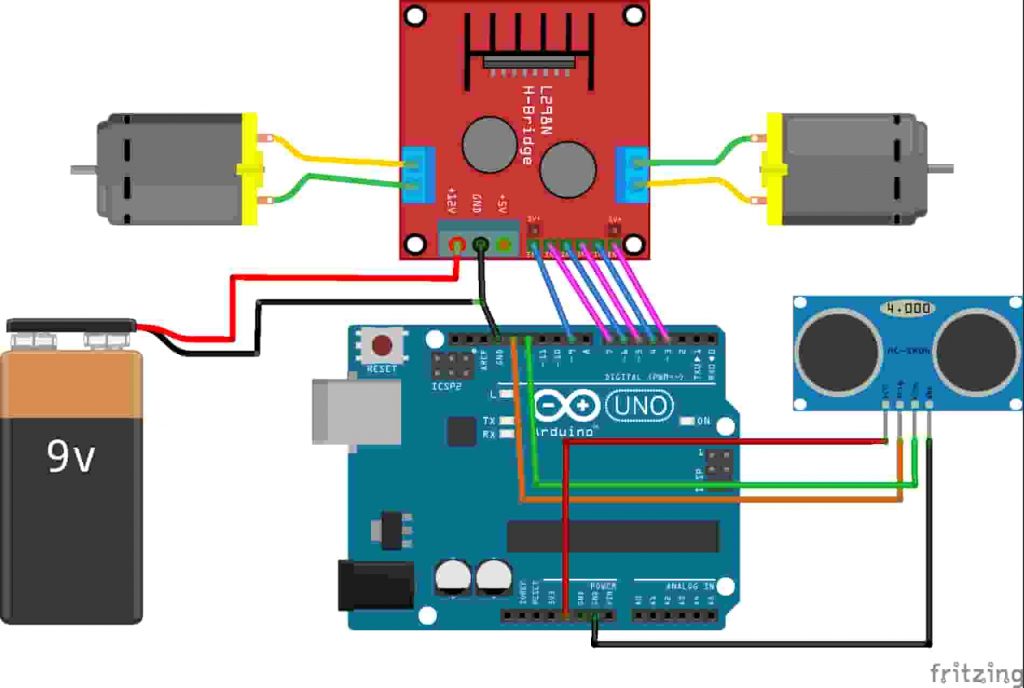
- Arduino Uno
- Çok Amaçlı Robot Platformu (Biz Platforma kitini kullandık. Dilerseniz bu kiti de kullanabilirsiniz.)
- L298N Voltaj Regulatörlü Çift Motor Sürücü Kartı
- HC-SR04 Ultrasonik Mesafe Sensörü
- Pil ( Alkalin piller robotu yaklaşık 15 dk. verimli şekilde çalıştıracaktır. Li-Po pil kullanmanız robotu daha uzun süre ve daha verimli çalıştıracaktır.)
- 6’lı AA Pil Yuvası
- Jumper

Engelden Kaçan Robot Devresi
Ultrasonik Sensörün Çalışma Prensibi
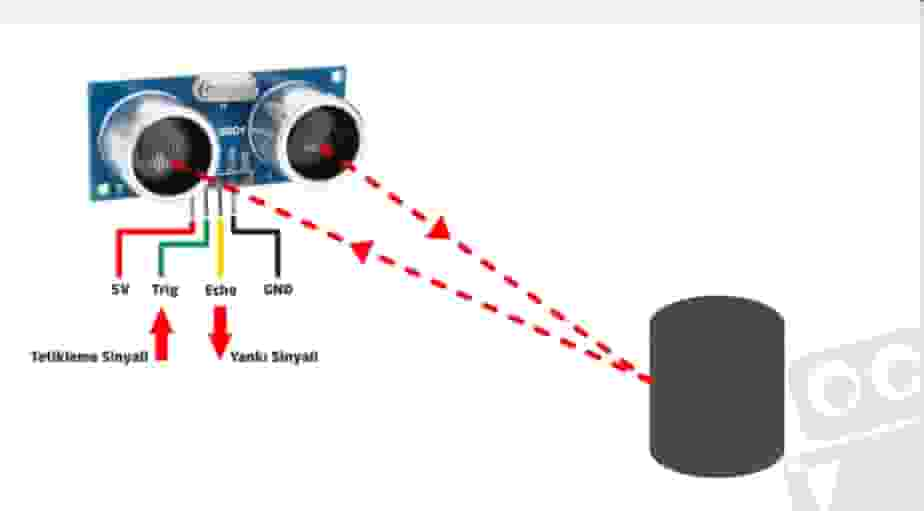
Ultrasonik sensörün çalışma prensibinden bahsettiğimiz videomuza buradan göz atabilirsiniz.
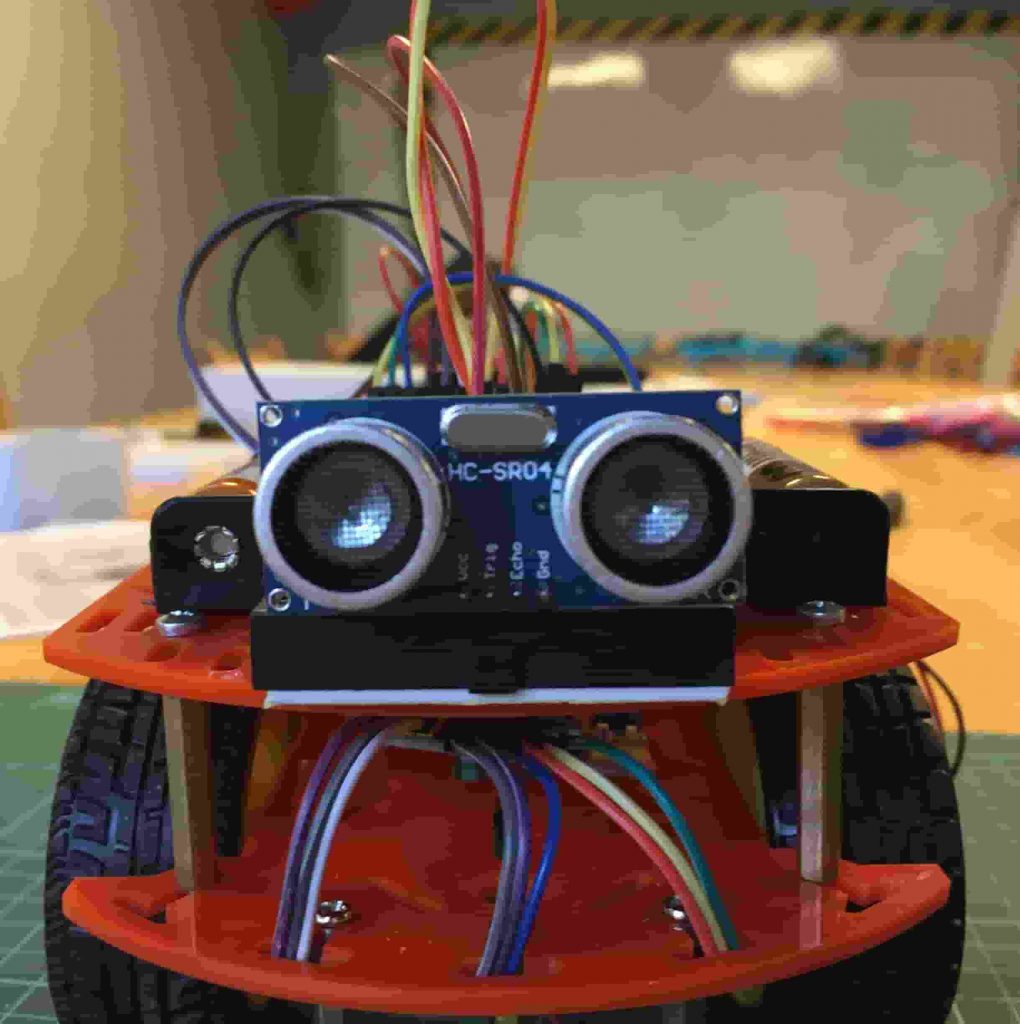
Robotun Gövdesi
Robotumuzun gövde montajını daha önceden yaptığımız Çizgi İzleyen Robot uygulamasında bulabilirsiniz. Yaptığımız robotun gövdesi aynı olup sadece kullanılan sensörler değişmiştir.
Projemizin son hali şekilde gibidir.
Proje hakkında yorumlarınızı aşağıdaki ‘Yorumlar’ kısmında bizimle paylaşabilirsiniz.
Siz de yaptığınız projeleri Twitter ve Instagram üzerinden #Robotistan hashtagi ile bizimle paylaşın, projenizi hesabımızda paylaşalım !
Twitter ve Instagram Hesaplarımız: @Robotistan
Algoritma
Robotumuzu kodlamaya başlamadan önce hangi işlemleri takip edeceğimizi bilmemiz gerekiyor. Temel amacımız robotun bir engele takılmaması olacaktır. Örnek olarak geniş bir zeminde engelle karşılaştığında sağ yöne hamle yapan bir robotun temel algoritmasını göstermek istiyorum :
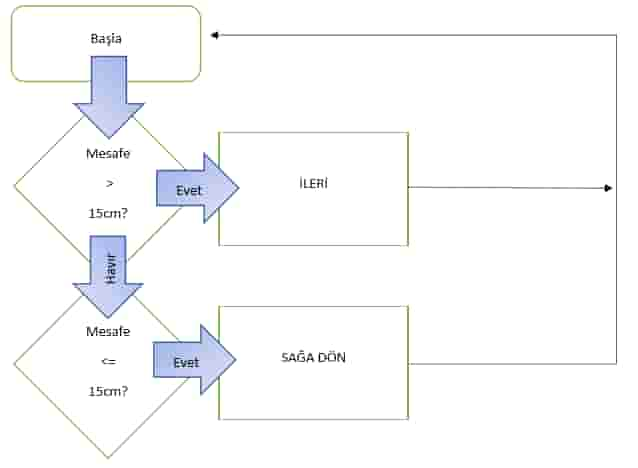
Bu algoritmayı Arduino’da yazalım 🙂
Arduino Kodları
#define echoPin 12 //Ultrasonik sensörün echo pini Arduino'nun 12.pinine
#define trigPin 13 //Ultrasonik sensörün trig pini Arduino'nun 13.pinine tanımlandı.
#define MotorR1 7
#define MotorR2 6
#define MotorRE 9 // Motor pinlerini tanımlıyoruz.
#define MotorL1 5
#define MotorL2 4
#define MotorLE 3
long sure, uzaklik; //süre ve uzaklık diye iki değişken tanımlıyoruz.
void setup() {
// ultrasonik sensör Trig pininden ses dalgaları gönderdiği için OUTPUT (Çıkış),
// bu dalgaları Echo pini ile geri aldığı için INPUT (Giriş) olarak tanımlanır.
pinMode(echoPin, INPUT);
pinMode(trigPin, OUTPUT);
pinMode(MotorL1, OUTPUT);
pinMode(MotorL2, OUTPUT);
pinMode(MotorLE, OUTPUT); //Motorlarımızı çıkış olarak tanımlıyoruz.
pinMode(MotorR1, OUTPUT);
pinMode(MotorR2, OUTPUT);
pinMode(MotorRE, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(trigPin, LOW); //sensör pasif hale getirildi
delayMicroseconds(5);
digitalWrite(trigPin, HIGH); //Sensore ses dalgasının üretmesi için emir verildi
delayMicroseconds(10);
digitalWrite(trigPin, LOW); //Yeni dalgaların üretilmemesi için trig pini LOW konumuna getirildi
sure = pulseIn(echoPin, HIGH); //ses dalgasının geri dönmesi için geçen sure ölçülüyor
uzaklik = sure / 29.1 / 2; //ölçülen süre uzaklığa çevriliyor
Serial.println(uzaklik);
if (uzaklik < 15) // Uzaklık 15'den küçük ise,
{
geri(); // 150 ms geri git
delay(150);
sag(); // 250 ms sağa dön
delay(250);
}
else { // değil ise,
ileri(); // ileri git
}
}
void ileri(){ // Robotun ileri yönde hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, HIGH); // Sağ motorun ileri hareketi aktif
digitalWrite(MotorR2, LOW); // Sağ motorun geri hareketi pasif
analogWrite(MotorRE, 150); // Sağ motorun hızı 150
digitalWrite(MotorL1, HIGH); // Sol motorun ileri hareketi aktif
digitalWrite(MotorL2, LOW); // Sol motorun geri hareketi pasif
analogWrite(MotorLE, 150); // Sol motorun hızı 150
}
void sag(){ // Robotun sağa dönme hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, HIGH); // Sağ motorun ileri hareketi aktif
digitalWrite(MotorR2, LOW); // Sağ motorun geri hareketi pasif
analogWrite(MotorRE, 0); // Sağ motorun hızı 0 (Motor duruyor)
digitalWrite(MotorL1, HIGH); // Sol motorun ileri hareketi aktif
digitalWrite(MotorL2, LOW); // Sol motorun geri hareketi pasif
analogWrite(MotorLE, 150); // Sol motorun hızı 150
}
void geri(){ // Robotun geri yönde hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, LOW); // Sağ motorun ileri hareketi pasif
digitalWrite(MotorR2, HIGH); // Sağ motorun geri hareketi aktif
analogWrite(MotorRE, 150); // Sağ motorun hızı 150
digitalWrite(MotorL1, LOW); // Sol motorun ileri hareketi pasif
digitalWrite(MotorL2, HIGH); // Sol motorun geri hareketi aktif
analogWrite(MotorLE, 150); // Sol motorun hızı 150
}
Bir robot uygulamamızın daha sonuna geldik. Bir başka projede görüşmek üzere, takipte kalın 🙂







sitenizden satın aldığım arduino uyumlu nrf24l01 +pa ile arabya doğru şekilde bağlantı yaptım ama yazdığım kod ile test ettiğimde transmitterin çalışmadığını söylüyor bana yardımcı olrmusunuz …
NRF24L01 ile uzaktan kontrol uygulamamıza buradan göz atabilirsiniz. Yazdığınız kodun amacını bilmediğimden net bir yorum yapamıyorum fakat uygulamamıza göz attıktan sonra yazılımınızı kontrol edebilirsiniz.
Öncelikle merhabalar ben bu projeyi yapmaya çalıştım ama çalışmadı. Ben L298N sürücüsünde sıkıntı olduğunu düşünüyorum video dışında sürücü kart ile bir kısa devre veya onun gibi bir şey yapmamız gerekiyor mu
Bana devrede VIN bağlantısı atanmış gibi geldi. Ya l298n in 12v sinden yada 5v sinden Uno ya VIN çekilmesi gerek.
Bencede
nasıl yani ayrıca birşey yapmamız gerekecek mi ?
sizden aldığım hcrs 04 ısınıyor
elimde tutamıyorum
neden acaba
Pin bağlantılarını tekrar kontrol edebilir misiniz? Bağlantı hatası veya kısa devre olmuş olabilir.
Merhabalar engelden kaçan robot yapımı için tüm parçaları sitenizden temin ettim ancak robotu çalıştırdığımda engelleri algılamıyor? Herşeyi doğru yaptığımı düşünüyorum yardımcı olabilir misiniz?
Merhaba. Arduino IDE’nin sağ üst kısmında bulunan “Seri Port Ekranı”nı kontrol ettiniz mi? Ultrasonik sensörü robottan söküp ayrı bir devrede test edebilir misiniz?
ÜRÜNLER NE ZAMAN STOKTA OLUR. YUKARIDAKİ KODLAR 4 TEKER VE MOTORLU KASA İÇİNDE UYGUN MUDUR TEŞEKKÜELER.
Stoklarla ilgili bilgi almak için [email protected] adresimizden bilgi alabilirsiniz. Stokta olmayan ürünlerde yandaki “Stoklara Düşünce Haber Ver” kısmına tıklayarak stok bilgilerini takip edebilirsiniz.
4 motora sahip robot kullanmak istiyor ve aynı programdan faydalanmak istiyorsanız aynı taraftaki motorları paralel bağlamanız gerekir. Yani sağ ön motor ile sağ arka motor, sol ön motor ile sol arka motor paralel bağlanmalıdır.
Bu urunun kitini almak istiyorum teker teker toplamasam?
Projemizdeki tüm malzemelerin bulunduğu bir kit mevcut değil. Bu işlemi yapabilecek tüm malzemelerin bulunduğu bir robot kiti arıyorsanız sitemizde bulabilirsiniz.
enkoder nerede kullanılıyor
Yaptığımız uygulamada enkoder kullanılmamaktadır.
aracı yaptım fakat düz gitmiyor L298N Voltaj Regulatörlü Çift Motor Sürücü Kartı hata olabilir mi
Motorların ikisi de çalışıyor ve iki motor da ileri-geri hareket edebiliyorlar ise sürücüde sorun yoktur. Robota sadece “ileri git” veya sadece “geri git” gibi komutlar verip hamlelerini test edebilirsiniz. Bu testi gibi “sağa dön” ve “sola dön” komutları vererek de yapabilirsiniz. Bu şekilde motordaki ileri ve geri yönleri anlaşılır. Eğer motorlar doğru yönde dönüyorlarsa ve robotu yere koyduğunuzda hafif yalpalayarak gidiyorsa motor ile tekerlekler tam oturmamış olabilir.
6 tane kalem pili belirtildigi sekilde bagladim. Hersey calisiyor ama motorlara tam guc gitmiyor. Sanki titriyor gibi bir hareket var. Ancak bu haldeyken arduino kartini kablosuyla seri porta bagladigimda hersey duzgun calisiyor. Sorun nerede anlamadim…
ekstra 9v pil bağlayınca arduinoya sorun çözüldü…
Engelden kaçan bir robot yaptım hc-sr04 mesafe sensörünü servo motorun üzerine bağladım. Hareketten kaçıyor ama servo motora kod yazamadım yardımcı olabilir misiniz. Kodları yüklerken hata veriyor. Yüklediğim kodları yollayayım isterseniz.
Nerede sorun yaşadığınızı anlayamadım. Motorları ayrıca test ettiğinizde ileri-geri hareketlerini doğru yapıyorlar mı? Sensörünüz mesafe görüyor mu? İkisi de doğru çalışıyorsa programı tekrar kontrol edebilir misiniz?
Tayfun bey abi ardinoda yeni basladim yazilima bu proje ile ilgili her malzeme mevcut elimde kafama tek takilan yazarken ardinoya yeni sayfami acmamiz gerkiyor
Arduino’da yeni boş sayfa açabilirsiniz veya içinde program olan sayfadaki kodları silip kendi kodunuzu yazabilirsiniz.
kod işe yaramaıyor
Uluslararası İHL Sivas
ADMİN BEY ,sayfanızdaki içerikler çok işime yaradı , kod doğru çalışıyor;
Sayfanızın düzenini de çok takdir ettim , çizgi izleyen vb robotların kodları ve bağlanış şekli de varmış ,inşallah bu kodu ve bağlamayı bitirince
diğerlerine geçeceğim…
TEŞEKKÜRLER…
Güzel yorumlarınız için teşekkür ederiz, kanalımızdaki videoları incelemeye ve canlı yayınlarımıza da bekleriz 🙂 https://www.youtube.com/robotistan
L298N yerine L293D kullanabilirmiyiz herhangi bir sorun olurmu
Düzeltme: L293D, 600mA’e kadar çalışabildiği için aşırı zorlanma sonucu ısınabilir. (Datasheet)
3d cıktı konusunda öğrencilere ücretsiz yardımcı olabilirim. [email protected] adresinden ulaşabilirsiniz.
Arkadaşlar selamlar, geçenlerde ultrasonik sensör ile mesafe ölçümü projesi yaptım. Çok eğlenceli gelmişti. Bu proje çok daha ilgi çekici olmuş. Emeği geçen arkadaşlara teşekkürler.
Merhaba engelden kaçan robotunuzu yaptım kod sayfasıda aynı şekilde sizin yazdığınız kodlarda sadece geri doğru gidiyordu robot onu çözmeye çalışırken sensör çalışıyordu o sorunu çözdüm ileri gidiyor robotum ama bu sefer engelleri algılamıyor sadece ileri gidiyor. seneörle ilgili bir değişiklik yapmadım sorun ne olabilir sizce kod sayfasınıda kopyalıyorum
#define echoPin 12 //Ultrasonik sensörün echo pini Arduino’nun 12.pinine
#define trigPin 13 //Ultrasonik sensörün trig pini Arduino’nun 13.pinine tanımlandı.
#define MotorR1 6
#define MotorR2 7
#define MotorRE 9 // Motor pinlerini tanımlıyoruz.
#define MotorL1 5
#define MotorL2 4
#define MotorLE 3
long sure, uzaklik; //süre ve uzaklık diye iki değişken tanımlıyoruz.
void setup() {
// ultrasonik sensör Trig pininden ses dalgaları gönderdiği için OUTPUT (Çıkış),
// bu dalgaları Echo pini ile geri aldığı için INPUT (Giriş) olarak tanımlanır.
pinMode(echoPin, INPUT);
pinMode(trigPin, OUTPUT);
pinMode(MotorL1, OUTPUT);
pinMode(MotorL2, OUTPUT);
pinMode(MotorLE, OUTPUT); //Motorlarımızı çıkış olarak tanımlıyoruz.
pinMode(MotorR1, OUTPUT);
pinMode(MotorR2, OUTPUT);
pinMode(MotorRE, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(trigPin, LOW); //sensör pasif hale getirildi
delayMicroseconds(5);
digitalWrite(trigPin, HIGH); //Sensore ses dalgasının üretmesi için emir verildi
delayMicroseconds(10);
digitalWrite(trigPin, LOW); //Yeni dalgaların üretilmemesi için trig pini LOW konumuna getirildi
sure = pulseIn(echoPin, HIGH); //ses dalgasının geri dönmesi için geçen sure ölçülüyor
uzaklik = sure / 29.1 / 2; //ölçülen süre uzaklığa çevriliyor
Serial.println(uzaklik);
if (uzaklik < 15) // Uzaklık 15'den küçük ise,
{
geri(); // 150 ms geri git
delay(150);
sag(); // 250 ms sağa dön
delay(250);
}
else { // değil ise,
ileri(); // ileri git
}
}
void ileri(){ // Robotun ileri yönde hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, LOW); // Sağ motorun ileri hareketi aktif
digitalWrite(MotorR2, HIGH); // Sağ motorun geri hareketi pasif
analogWrite(MotorRE, 200); // Sağ motorun hızı 150
digitalWrite(MotorL1, LOW); // Sol motorun ileri hareketi aktif
digitalWrite(MotorL2, HIGH); // Sol motorun geri hareketi pasif
analogWrite(MotorLE, 200); // Sol motorun hızı 200
}
void sag(){ // Robotun sağa dönme hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, LOW); // Sağ motorun ileri hareketi aktif
digitalWrite(MotorR2, HIGH); // Sağ motorun geri hareketi pasif
analogWrite(MotorRE, 200); // Sağ motorun hızı 0 (Motor duruyor)
digitalWrite(MotorL1, LOW); // Sol motorun ileri hareketi aktif
digitalWrite(MotorL2, HIGH); // Sol motorun geri hareketi pasif
analogWrite(MotorLE, 200); // Sol motorun hızı 200
}
void geri(){ // Robotun geri yönde hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, LOW); // Sağ motorun ileri hareketi pasif
digitalWrite(MotorR2, HIGH); // Sağ motorun geri hareketi aktif
analogWrite(MotorRE, 200); // Sağ motorun hızı 150
digitalWrite(MotorL1, LOW); // Sol motorun ileri hareketi pasif
digitalWrite(MotorL2, HIGH); // Sol motorun geri hareketi aktif
analogWrite(MotorLE, 200); // Sol motorun hızı 150
}
sensörün sorununu nasıl çözdünüz acaba bende de aynısı oldu
selamlar. ben sizin yaptığınızı yapıyorum tek sensörle. ama ben 3 sensörlü yapmak istedim ve okadar kolay olmadığını anladım. yani 3 tane mesafe sensöründen birine tanımladığım if else diğer sensördeki ile çakışıyor. bunları nasıl bağımsız yapabilirim. yardımcı olur musunz bana bu konuda ?
selam bir teker hızlı dönüyor diyeri ise yavaş dönüyor yardım
Hareket fonksiyonları olan ileri, geri, sağ ve sol fonksiyonlarında yer alan analogWrite(150) komutlarındaki değerleri değiştirerek tekerleklerin hızlarını eşitleyebilirsiniz.
şemada klemensli barel jack yok fakat videoda kullanmışşınız şemadakini mi uygulayalım yoksa videodakini
Hangisi daha kolay geliyorsa onu tercih edebilirsiniz. Herhangi bir fark olmayacaktır.
Devreyi aynen yaptım enerji verdim çalışmıyor. Ne yapmalıyım ben öğrenciyim ve bunu mayısa kadar yetiştirmem lazım. Bana bunu nasıl 3 hcsr04 ile yapabileceğimi söylermisiniz. Bir tane de basit proje lazım bana. Lütfen yardım edin. HC-SR04 İle labirent çözen yapmaya çalışıyorum. Mayısa yapcam. ACELE YARDIM EDİN. 1 aydır ben buna uğraşıyorum. L293D Motor Shield aldım. Olmadı. Sadece entegresini kullandım olmadı. L298N ile yani bun devreyle de olmadı. YARDIM NOLUR.
bu kod labirent çözenin değil engelden kaçanın
labirent çözen yaptın mı bende istiyorum yardımcı olur musun?
4 moturlu yapmak istiyorum ancak bir tane çift motor sürücü kartı var. bit tane ile 4 motor kullanabilrmiyim yada 2 tane mi sürücü kartı kullanmam gerek yardım edermisiniz
Sağ ve sol tarafta ikişer adet motor kullanacaksanız her iki motorun da kablolarını paralel bağlayarak tek motor gibi 2’li motor sürücünüze bağlamanız mümkündür. Bu durumda her motoru tek tek kontrol etme şansınız olmayacaktır, fakat hareket için gerekli ileri-geri ve sağ-sol dönüşleri yaptırabilirsiniz.
lezzetli robot tarifleri kanalında onu acıklıyor oraya bakarsan sana yardıncı olabilir :)ü
robot düz gitmiyor ileri komutunu veriyorum fakat hemen sağa dönüyor.
merhaba nihal hanım benim robotta aynı engel olmadığı halde sağa dönüyor düz gitmiyor siz sorunu çözebildiniz mi?
BEN DE AYNI SIKINTIYI YAŞIYORUM. ÇÖZÜME ULAŞTINIZ MI ACABA?
ben de aynı sıkıntıyı yaşıyorum. Acaba nasıl düzelttiniz ???
sizden sipariş verdiğimiz motorlar ikisi de faklı hızda dönüyor ve yalpalıyor .
Iyi gunler ayni sekilde yaptim engel olmadigi halde ileri gitmiyor etrafinda saga donuyor sorun nerde olabilir
Engelden kaçan robotu yaptım algılamasında bir sorun yok fakat bazen tekerlek takılıyor ultrasonic sensöre servo motor takmak istiyorum acaba arduinoda nereye takmam gerekiyor yardımcı olursanız sevinirim.
Merhaba, robotu yaptım çalışıyor fakat sensör bazen yanı görmüyor bu yüzden teker takılıyor. Ben ekstra servo motor eklemek istiyorum sensörün altında olup sağa sola dönmesini sağlayacak. Yardım ederseniz sevinirim
Servo motoru mesafe sensörüne bağlamak için şu iki ürünümüzü kullanabilirsiniz:
https://www.robotistan.com/ultrasonic-sensor-montaj-aparati-tip-a-servo-uyumlu
https://www.robotistan.com/ultrasonic-sensor-montaj-aparati-tip-b-servo-uyumlu
Geriye yalnızca programdaki değişiklik kalıyor. Robot hareket komutu almadan önce servoyu istediğiniz açılarda döndürüp etrafı taratabilir, her bir yöne dönükken yapılan tarama sonucunda elde edilen mesafeyi sağ mesafe ve sol mesafe gibi değişkenler içerisine atayarak buna göre robotun hangi yöne döneceğine karar verdirebilirsiniz. Servo motor kullanımı için buradaki yazımıza başvurabilirsiniz.
// Yazılım Geliştirme By Robimek – 2015
#include // servo motor kütüphanesi
#include
//motor pinleri
#define SolMotorileri 9
#define SolMotorGeri 10
#define SagMotorileri 11
#define SagMotorGeri 12
//sensör pinleri
#define USTrigger 6
#define USEcho 7
#define Maksimum_uzaklik 100
Servo servo; //servo motor tanımlama
NewPing sonar(USTrigger, USEcho, Maksimum_uzaklik);//ultrasonik sensör tanımlama
//kullanılacak eleman tanımı
unsigned int uzaklik;
unsigned int on_uzaklik;
unsigned int sol_uzaklik;
unsigned int sag_uzaklik;
unsigned int zaman;
// program ilk çalıştığında sadece bir kez çalışacak programlar
void setup()
{
//motor çıkışları
pinMode(SolMotorileri, OUTPUT);
pinMode(SolMotorGeri, OUTPUT);
pinMode(SagMotorileri, OUTPUT);
pinMode(SagMotorGeri, OUTPUT);
servo.attach(4); //servo pin tanımı
}
// sonsuz döngü
void loop()
{
delay(500);
servo.write(90);
sensor_olcum();
on_uzaklik = uzaklik;
if(on_uzaklik > 35 || on_uzaklik == 0)
{
ileri();
}
else
{
dur();
servo.write(180);
delay(500);
sensor_olcum();
sol_uzaklik = uzaklik;
servo.write(0);
delay(500);
sensor_olcum();
sag_uzaklik = uzaklik;
servo.write(90);
delay(500);
if(sag_uzaklik>sol_uzaklik)
{
sag();
delay(500);
ileri();
}
else if(sol_uzaklik >sag_uzaklik)
{
sol();
delay(500);
ileri();
}
else
{
geri();
}
}
}
// robotun yön komutları
void ileri()
{
digitalWrite(SolMotorGeri, LOW);
digitalWrite(SolMotorileri, HIGH);
digitalWrite(SagMotorGeri, LOW);
digitalWrite(SagMotorileri, HIGH);
}
void geri()
{
digitalWrite(SolMotorileri, LOW);
digitalWrite(SolMotorGeri, HIGH);
digitalWrite(SagMotorileri, LOW);
digitalWrite(SagMotorGeri, HIGH);
}
void sol()
{
digitalWrite(SolMotorileri, LOW);
digitalWrite(SolMotorGeri, HIGH);
digitalWrite(SagMotorGeri, LOW);
digitalWrite(SagMotorileri, HIGH);
}
void sag()
{
digitalWrite(SolMotorGeri, LOW);
digitalWrite(SolMotorileri, HIGH);
digitalWrite(SagMotorileri, LOW);
digitalWrite(SagMotorGeri, HIGH);
}
void dur()
{
digitalWrite(SolMotorGeri, LOW);
digitalWrite(SolMotorileri, LOW);
digitalWrite(SagMotorileri, LOW);
digitalWrite(SagMotorGeri, LOW);
}
// sensörün mesafe ölçümü
void sensor_olcum()
{
delay(50);
zaman = sonar.ping();
uzaklik = zaman / US_ROUNDTRIP_CM;
}
kodda bir sorun var. kodu kontrol edip düzeltebilirmisiniz
Kolay gelsin çizgi izleyip engelden kaçan robot yapmak istiyoruz.üniversitede proje olarak seçtik bunu nasıl yapabiliriz ?
Her iki robot için de gerekli olan donanımı kurup, bir anahtar yardımı ile robotun çalışma modları arasında geçiş yapmasını sağlayabilirsiniz. Bunun için de çizgi izleyen kodunu programda bir fonksiyon altına, engelden kaçan kodunu da başka bir fonksiyon altına yerleştirip, loop içerisinde anahtar durumunu bir if veya switch/case yapısı ile okuyup robotun istediğiniz modda çalışmasını sağlayabilirsiniz.
6 lı pil yuvası yerine 9v luk pil olan şunu alsam olur mu? https://www.robotistan.com/9v-pil-yuvasi-barrel-jack-cikisli
Kullanabilirsiniz tabi ki, fakat 9V pillerin kapasitesi ve verebildikleri akım 6 adet AA kalem pilin kapasitesi ve sağlayabileceği akımdan daha düşüktür. Bu sebepten dolayı 6’lı pil yuvası kullanmaktayız. Aynı gerilim olduğu için 9V pil de kullanabilirsiniz, sadece robotunuz daha kısa sürede pili bitirecektir.
bana pil yetmiyor 9wolt arduino ya elektirik fazla gitmiyor ve motorlar çalışömıyor ayrıca 18wolt takıbnca aradan zaman geçtikten sonra arduino yandı tekrar aldım oda yandı
Arduino’nun adaptör girişinden verebileceğiniz maksimum gerilim 12V civarındadır. 18V ile uzun süre kullanımda sorun yaşamanızın sebebi, kart üzerindeki regülatörün bu yüksek gerilime dayanamaması ve aşırı ısınmasındandır. Daha uzun çalışma süresi istiyorsanız 2 hücreli (7.4V) LiPo bataryaları tercih edebilirsiniz: https://www.robotistan.com/2s-74v-li-po
merhaba 6 ad 1,5v duracell pil ile motorları çalıştıramıyorum. 12V akü ile denediğimde motorlar çalışıyor. Sebep ne olabilir ?
Merhaba iyi günler ben sitenizden aynen videodaki herşeyi aldım yaptım kodu yazdım yükledim ama herhangi bir hareket yok final proje ödevim yardımcı olurmusunuz
Yaşadığınız problemi daha detaylı anlatabilirseniz daha kolay yardımcı olmamız mümkün olur.
Aynen anlatılanları yaptım. Sürekli SAĞA dönüyor ya sensör çalışmıyor yada kodda hata var. Sensörü iptal ettim yine aynı
Sorunu çözdüm motor bağlantılarını aynı bağlamışım. Birini diğerinin tersi biçiminde karta bağladım düzeldi.
Daha açık anlatabilir misiniz çözümü? Ben de aynı sorunu yaşıyorum.
araç engeli algılıyor ve çarpıyor sonra geri gelip sağ yapıyor sonra ileri gidiryor ve sensör duruyor ne yapmalıyım
ardunio üzerindeki rx ve L ledleri yanıp sönüyor fakat araçta hiç hareket yok
aynısı bende oldu nasıl çözdünüz
l293 entegre motor sürücüm var ona mesafe sensörünü nasıl bağlarım
L293 motor sürücü entegresine mesafe sensörünüzü bağlayamazsınız, sensörü ve sürücüyü Arduino’nuza bağlamanız gereklidir.
robot gövdesini ölçülerini verme imkanınız var mıdir? üstündeki deliklerin mesafesi vb.
Malzeme listesinde yer alan “Çok Amaçlı Robot Platformu” ürününün açıklamasında boyutları mevcuttur.
ışık izleyen robot yapımı yapar mısınız? çok aciillll
Ben devreyi yaptim calisti ama birden bire ardinyonun isiklari yanmamaya basladi ve tekerler donmuuo motor surucusjmu bozildu acaba acil cevap
Kablolamada bir sorun olmuş olabilir. Devrelerde bağlantı kopukluğu veya kısa devre olmadığından emin olun.
İyi günler engelden kaçan robot aldım ama kuramdım elinizde hazırkurulumu bitmiş robot varsa ulaştırma şansınız var mı
Hazır ürün arıyorsanız Makeblock mBot ürününü inceleyebilirsiniz: https://www.robotistan.com/makeblock-mbot-bluetooth-kiti-v11-mavi
SENSÖR HİÇBİRŞEYİ ALGILAMIYOR NEDENİ NE OLABİLİR ACİLL
Kullandığınız sensör, yazmış olduğunuz kod vs. gibi detayları paylaşırsanız daha kolay yardımcı olabiliriz.
ÖNEMLİİİ!!!!
Biz bu projeye buzzer koymak istiyoruz.Örnegin: mesafe 50 cm iken buzzer ötmeye başlıcak.mesafemiz kısaldıkça buzzerda ses artışı olacak.40 cm e geldiğinde ise robotumuz yön degiştircek.Bunu nasıl yapabiliriz.yardımcı olursanız sevinirim. kolay gelsin
Buradaki örnek projemizi inceleyebilirsiniz: Arduino ile Basit Park Sensörü Yapımı
Hocam merhaba engelden kaçan ve blueetoth kontrllü aracı bir arada kullanmak için kodu vae devreyi nereden bulabilirim? İLGİNİZ İÇİN TEŞEKKÜRLER
iyi günler
1 adet Arduino 4WD Robot Araba Kiti
1 adet Arduino Uno R3 (CH340 Klon)
1 adet Arduino Uno USB Kablo
1 adet HC-06 Bluetooth Modül
1 adet Arduino L293D Motor Shield
1 adet HC-SR04 Ultrasonic Mesafe Sensörü
aldım ama arabayı entegre ettim . ama çalışmıyor bağlantı şeması paylaşırmısınız tşkler
Yazıyı okursanız devre şemasını gözünüzden kaçırmanız imkansızdır.
uzaklik = sure / 29.1 / 2; yazılımı yuklerken bu bolumde hata veriyor yardım
birden fazla HC-SR04 takmak istiyorum buna uygun yazılımınız varmı
Hocam çok güzel. Bide labirent çözen robot yapma imkanınız var mı acaba?
Her ürünü sitenixdrn aldım ve aduinoyu güç verinçe hiç bir işikyanmıyor neden
Satın almış olduğunuz ürün arızalı olabilir. Buradaki iletişim bilgilerini kullanarak teknik destek birimimizle iletişime geçebilirsiniz: https://www.robotistan.com/iletisim.xhtml
İyi Günler.
2 wd araç kiti ile , Arduıno, Breadboard, Hc-SR04 Ultrasonik Mesafe Sensörü, L298N sürücü kartı kullandım.
Engelden Kaçan Robot Uygulaması benim sorunum Tek tekerleğin sürekli etrafında dönüyor olması. (out1-out2) kısmı dönüyor.
(out3-out4) kısmı dönmüyor. Bağladığım kabloları L298N devresinden çıkartığım zaman pillerle deniyorum 2 tekerlek dönüyor.
Sizin [email protected] yazdım. ama beni bu sayfaya yönlendirdiler. Ama maalesef teker teker yukarıdaki projeyi ve kodlamayı yapmama rağmen 1 tekerlek çalışıyor öbür tekerlek çalışmıyor. Bu arada videodaki söylenen kodlar ile sizin verdiğiniz kodlar farklı ben iki sinide denedim. Ama bir türlü 2 WD araç ileri gitmiyor ve ya yerinde dönüyor ya da sağa dönüyor engel gördüğünde hafif duruyor sonra tekrar dönüyor. acaba nerde hata yapıyorum. Lütfen Yardımcı olur musunuz. Teşekkür ederim.
Sorunu çözdüm. Teşekkürler..
Sorunu nasıl çözdünüz ben de aynı sorunu yaşıyorum yardımcı olur musunuz?
Nasıl çalıştığiyla ilgili videoyu bulamadım yardımcı olur musunuz
Ben videodaki herşeyi yaptım fakat araba 369 dönüyor yardım edin lütfen.
sürekli etrafında dönüyor
Merhaba iyi günler
robotum düz gitmiyor sapmalar yapıyor sağa doğru ve diğer bi sorum 1 sensör yerine 3 sensör nasıl yapabilirim yardımcı olabilir misiniz şema ve kod kısmında
Merhabalar, üç sensörlü kod için Çizgi İzleyen Robot Yapımı – 7 Dk’da Öğren! projemizdeki gibi bir mantık izlemeniz gerekir. Kod kısmında eğer sağdaki sensör engel görüyorsa sola git, soldaki sensör sağa git gibi bir mantık kurabilirsiniz. Ultrasonik sensörleri farklı pinlere tanımlayıp benzer şekilde fazladan 2 sensörden bilgi alabilmeniz mümkündür.
KODLARI AYNENE YÜKLEDİM BAĞLANTILARI AYNEN YAPTIM AMA MOTORLAR TIK TIK SES .IKARIYOR VE İLERLEMİYOR KODLAR
#define echoPin 12 //Ultrasonik sensörün echo pini Arduino’nun 12.pinine
#define trigPin 13 //Ultrasonik sensörün trig pini Arduino’nun 13.pinine tanımlandı.
#define MotorR1 7
#define MotorR2 6
#define MotorRE 9 // Motor pinlerini tanımlıyoruz.
#define MotorL1 5
#define MotorL2 4
#define MotorLE 3
long sure, uzaklik; //süre ve uzaklık diye iki değişken tanımlıyoruz.
void setup() {
// ultrasonik sensör Trig pininden ses dalgaları gönderdiği için OUTPUT (Çıkış),
// bu dalgaları Echo pini ile geri aldığı için INPUT (Giriş) olarak tanımlanır.
pinMode(echoPin, INPUT);
pinMode(trigPin, OUTPUT);
pinMode(MotorL1, OUTPUT);
pinMode(MotorL2, OUTPUT);
pinMode(MotorLE, OUTPUT); //Motorlarımızı çıkış olarak tanımlıyoruz.
pinMode(MotorR1, OUTPUT);
pinMode(MotorR2, OUTPUT);
pinMode(MotorRE, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(trigPin, LOW); //sensör pasif hale getirildi
delayMicroseconds(5);
digitalWrite(trigPin, HIGH); //Sensore ses dalgasının üretmesi için emir verildi
delayMicroseconds(10);
digitalWrite(trigPin, LOW); //Yeni dalgaların üretilmemesi için trig pini LOW konumuna getirildi
sure = pulseIn(echoPin, HIGH); //ses dalgasının geri dönmesi için geçen sure ölçülüyor
uzaklik = sure / 29.1 / 2; //ölçülen süre uzaklığa çevriliyor
Serial.println(uzaklik);
if (uzaklik < 15) // Uzaklık 15'den küçük ise,
{
geri(); // 150 ms geri git
delay(150);
sag(); // 250 ms sağa dön
delay(250);
}
else { // değil ise,
ileri(); // ileri git
}
}
void ileri(){ // Robotun ileri yönde hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, HIGH); // Sağ motorun ileri hareketi aktif
digitalWrite(MotorR2, LOW); // Sağ motorun geri hareketi pasif
analogWrite(MotorRE, 150); // Sağ motorun hızı 150
digitalWrite(MotorL1, HIGH); // Sol motorun ileri hareketi aktif
digitalWrite(MotorL2, LOW); // Sol motorun geri hareketi pasif
analogWrite(MotorLE, 150); // Sol motorun hızı 150
}
void sag(){ // Robotun sağa dönme hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, HIGH); // Sağ motorun ileri hareketi aktif
digitalWrite(MotorR2, LOW); // Sağ motorun geri hareketi pasif
analogWrite(MotorRE, 0); // Sağ motorun hızı 0 (Motor duruyor)
digitalWrite(MotorL1, HIGH); // Sol motorun ileri hareketi aktif
digitalWrite(MotorL2, LOW); // Sol motorun geri hareketi pasif
analogWrite(MotorLE, 150); // Sol motorun hızı 150
}
void geri(){ // Robotun geri yönde hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, LOW); // Sağ motorun ileri hareketi pasif
digitalWrite(MotorR2, HIGH); // Sağ motorun geri hareketi aktif
analogWrite(MotorRE, 150); // Sağ motorun hızı 150
digitalWrite(MotorL1, LOW); // Sol motorun ileri hareketi pasif
digitalWrite(MotorL2, HIGH); // Sol motorun geri hareketi aktif
analogWrite(MotorLE, 150); // Sol motorun hızı 150
}
Nasıl bir güç kaynağı kullandınız? Yeterince güçlü olmayan bir güç kaynağı veya bitik pil kullandığınızda bahsettiğiniz sorunla karşılaşma ihtimaliniz mevcuttur.
4 terekde de çalışır mı?
Sağ ve sol taraftaki motorları paralel bağlarsanız çalışır.
MakeBlock mBot Bluetooth Kiti v1.1 aldım.
Bu kodu yazdım ve yükledim…açıp kapadım ama değişen hiçbişey yok.
Bu kitle bu yazılımı kendim çalıştıramaz mıyım?
mBot robotunda kendiliğinden engelden kaçma özelliği bulunmaktadır, bu programı yüklemenize gerek yoktur. Orijinal yazılımına mBlock yazılımını kullanarak geri dönebilirsiniz.
Bu tarz projeler için nasıl bir li-po pil önerirsiniz yani kaç mA ve volt değerinde olmalı ? Biraz saçma olacak ama projelerimizde ki güç hesabını ve özellikle akım değerlerini nasıl hesaplarız.
Merhabalar, genellikle 9V ile çalışan projeleriniz için 2S, yani 7.4V vev 12V ile çalışan projeleriniz için 3S yani 11.1V LiPo bataryaları tercih edebilirsiniz. Bu piller tam dolu iken sırasıyla 8.4V ve 12.6V gerilimlere sahip olacaklarından sorunsuzca kullanılabilir. Projelerdeki güç hesabını genellikle projedeki motorların çalışma gerilimine göre belirlemekteyiz. Kalem pil veya 9V gibi piller yeterli akımı genellikle sağlayabilmektedir, daha yüksek güç ve uzun çalışma süresi için LiPo tercih edilebilir. LiPo bataryalar hakkında detaylı şekilde bilgi sahibi olmak için videomuzu izleyebilirsiniz: https://www.youtube.com/watch?v=w4kxKJYPlTY
Teşekkürler Kerem bey.ben bu proje için galiba yüksek akım değerli bir pil aldım.11,1 V 2250mAH lipo aldım sitenizden.Kullanmadan önce teknik destek ekibinizden bilgi aldım.4A sigorta gerektirir şeklinde bilgi verildi.
Merhaba,
Yaptım ve şahane oldu elinize sağlık. Acaba bir de kendi kendine dengede duran robot projesi yayınlayacak misiniz?
Çok isterim.
Teşekkürler
Merhabalar, güzel sözleriniz için teşekkür ederiz. Arduino projelerimizi YouTube kanalımızdan takip edebilirsiniz: https://www.youtube.com/playlist?list=PLDRcccSktQd69AWjcdYWN-2aMcbsHyr6J
Merhaba ben robotu yaptım ama sol tekerler hiç dönmüyor acaba kodlamada mı bir hata var 4 tekerli 4 motorlu kiti kullandım tekerler aynı yönde dönüyor sıkıntı yok ama sağ tekerler dönerken sol tekerler dönmüyor ve sensör algılamıyor yardımcı olur musun ?
Stay 304 in program hatasını bir türlü gideremiyorum ve exit status 1 hatam var
Yardımınızı rica ederim
Aynı bağlantıyı aynı yazılımı yazdım fakat 9 volt pil kullandım ona rağmen motorlar dıııt dıye ses çıkarıyor ne ileri ne geri hiç tık yok neden acaba yardımcı olursanız sevinirim 🙂
Acil!
-elime alıp çalıştırdığımda sol teker geri sağ teker ileri gidiyor .
-yere koyunca geri geri tık tık gidiyor yani arka tarafı bi sağ bi sol yapıyor ağır ağır geri gidiyor tamammen asla ileri gitmiyor nerede hatam var
1 haftadır çözemedim yardımcı olurmusunuz?
-Teşekkür ederim.
-ve bunun videosunu çekip size nasıl atabilrim öyle bir imkan varmıdır,sorunu anlamadıysanınz eğer video yollayabilirim acil lütfn cevap veriniz.
motorların gücü yetmiyormuş ve 1 motoru ters bağlamışım sorun halloldu 🙂
Merhabalar,
Robotu kurdum, yazılım yükleme aşamasında “Karta yüklenirken sorun oluştu. Tavsiyeler için http://www.arduino.cc/en/Guide/Troubleshooting#upload adresine göz atabilirsiniz.” mesajı geliyor ve yazılım yükleyemiyorum.
Sorun nerdedir?
Iyi gunler engelden kacan robot parcalarinda jumper kablodan 1adet almamiz yeterlimi acaba
Merhaba,
bazı projeleri yapabilmek için, özellikle bu projeyi, sitenizden aşağıdaki ürünleri satın aldım. Öncelikle Proje setinden çıkan “Projelerle Arduino” kitabına detaylı bilgi koyulmamış, bilgiler kitapla bağlantılı olan videolara bırakılmış sanırım, fakat videoları izlemek için “Vakademi” isimli sitede hesap açmak mümkün değil zira aktivasyon maili atmayı başaramıyorlar ne yazikki (Gmail dahil birkaç mail adresiyle denendi). Kitaptaki anlatım yetersiz olduğundan engelden kaçan robotu oraya sağdık kalarak yapmak zor. Bu noktada çaresiz hissetmeye başlarken bu videoyu bularak umutlandım. Fakat aşağıda gördüğünüz gibi oldukça yoğun bir alım yapmama rağmen, videodaki pil aparatı mevcut değil, sadece tek 9V pil ile yapmak için gerekli şeyler var, ki sanırım içinden çıkan kitap da böyle yapıyor ama kitap videolarına ulaşamadığımdan o şekilde de yapamıyorum, zaten buradaki yorumlarda da 9V pil ile tekerlerin dönmediğinden vs bahsedilmiş. Bu durumda ben proje setini alırken tekerlekli robot yapma sebebiyle aldım, ve alım yaparken otomatik uyarı çıktı bu parçaları da almalısınız diye, onların da hepsini aldım. Madem 9V pil ile tekerler düzgün dönmeyecek, neden hala 9V pil bağlama setiyle satılıyor ve içinden bu kalem pil aparatı çıkmıyor, ya da alınması konusunda uyarı diğer parçalar gibi otomatik verilmiyor. Ek olarak içinden çıkan kitapta düzgün anlatım olmaması, anlatımların videolara bırakılmış olması, videoların da görünüşe göre ulaşılmaz olması pek hoş olmadı. Bu tarz proje yapmak için alışveriş yapcakların dikkat etmesini öneririm. Sizden de 9V ile düzgün çalışma ihtimali olup olmadığı konusunda tavsiye rica ediyorum, ya da tekrar parça beklemeden powerbank gibi bir şeyle yapılabilir mi? Mühendislik stajımda Arduino’lu projelerle uğraştığımdan zaman açısından darlık yaşıyorum, parça eksikliği planlanmamış gecikmeye sebep oldu. Selamlar.
*Arduino Başlangıç Seti
*Arduino Proje Seti
*HC06 Bluetooth-Serial Modül Kartı
*L298N Voltaj Regulatörlü Çift Motor Sürücü Kartı(Kırmızı PCB)
*Platforma Çok Amaçlı Mobil Robot Platformu – Kırmızı
abi 3 sensörlü olanın kodunu yaza bilirmisniz yazarsanız vap olarak göderirmisiniz
Arduinoya en fazla 20 volt verilebilir demişsiniz peki akü ile (12 v 60-80amper minibüs aküsü)çalıştırabilirmiyiz yani yüksek amper(60-80 civarı) arduinoya zarar verirmi
Abi Bluetooth ile çalıştırmak için kodları varmı
hangi uygulamada bu kodları yazarız
http://www.arduino.cc de sowftware diye bir yer var oraya gir ordan Arduino IDE var indir onu
Merhaba bu projeyi pic ile yapmak istiyorum ama kodlarda sorun yaşıyorum nasıl yaparım bir bilginiz var mı
YAZLIMI YÜKLERKEN LONG,SURE UZAKLIK YAZISINDA HATA GÖSTERİYOR YARDIMCI OLURMUSUNUZ
DEVREYİ DOĞRU YAPTIM KODUDA SİTEDEN ALDIM FAKAT ARDUİNO TIK TIK TIK……. YAPIYOR VE MOTORLAR DÖNMÜYOR YARDIMCI OLUR MUSUNUZ??
3 hcsr 04 sensörlu engelden kacan robot yapıcam
1-baglantılarını nasıl yapabilirim
2-nasıl bi kod yazmalıyım
Ardunio Uno değilde Arduniıo Mega 2560 Kart’la da kullanabilirmiyim?
Merhaba devrenin birebir aynısını kurduk hdmı ile arduinoya bağlayınca doğru çalışıyor bağlantısı sökülünce sürekli mesafe ölçümü yapıyor ileri gitmiyor ne yapabilirim.
Merhaba Robotistan. Motor sürücü kartı olmadan bu projeyi nasıl tamamlayabilirim?
29,014 olması gerek
Ya Ben Yeni Başlıyorum L298N Voltaj Regulatörlü Çift Motor Sürücü Kartının Sağ Ve Sol Kısmındaki Şeyler Nedir Malzemeler Kısmında Onunla Alakalı Birşey Göremedim Bir Eşya İle Beraber Mi Geliyor Dediğim Gibi Yeni Başlıyorum.
İyi günler ürünü sipariş verdim bugün geldi engelleri algılıyor yalnız iki teker normal durumda ters dönüyor ve bu yüzden sürekli kendi ekseni etrafında dönüyor bu durumda ne yapmalıyız.
Merhabalar hocam bu işte henüz yeniyim bir iki sorum olacak projem için bir adet Arduino ve motor sürücü ile aynı anda iki adet DC motor ve 2 adet ultrasonik sensör çalıştırmam mümkün mü yada bunun bir sınırı var mı en fazla kaç adet sensör kullanabilirim onlara ilave ışık sensörü yada ses sensörü de ekleyebilirmiyim yardımcı olurmusunuz
C:\Users\acer\AppData\Local\Temp\ccy1ljI8.ltrans0.ltrans.o: In function `main’:
C:\Program Files (x86)\Arduino\hardware\arduino\avr\cores\arduino/main.cpp:43: undefined reference to `setup’
collect2.exe: error: ld returned 1 exit status
exit status 1
Error compiling for board Arduino/Genuino Uno.
bu hatayı alıyorum.sorun ne olabilir ?
durmadan aynı yöne dönüyor bağlantıları düzgün yapıp yazlımı düzgün yükledim pil ise tam istenildiği gibi (güçde sıkıntı yok yani ) neden hep anı tara dönüyor
Programı karta yüklerken bir sorun çıkmadı. aurdino İDE uyarı vermedi.Gücü bağlayınca aurdino uno çalışıyor sensöre elimi gösterince uno tepki veriyor.Fakat robotun motorları tepki vermiyor. Sürücü kartını denedim,sürücü kartı çalışıyor. Sizce sorun ne olabilir?
Merhaba jumper Kablosuylamı pil yuvasını motarla falan bağlıyacaz lütfen yardım edin
Robotu yaptım güç kaynağı ile çalışıyor ama pil ile çalışmıyor
kodları girdim ama kendi ekseni etrafında dönüyor bir tekerlekte çalışmıyor neden
Merhabalar benim robotum Arduıno Nano ile hazırlandı buradan satın aldım fakat nerede hata yaptım bilmiyorum robotumun sensörü engeli algılamıyor engelden kaçan robot yapmak istiyorum ama engeli tanımıyor yardımcı olabilir misiniz?
Merhaba, serial monitör üzerinden uzaklık değerlerini okuyabiliyor musunuz? Eğer sensörünüzden veri alamıyorsanız bağlantıları ve kodu kontrol edebilir misiniz? Her şey doğru gidiyor ve buna rağmen uzaklık değerlerini alamıyorsanız sensörden kaynaklanan bir problem olabilir.
merhabalar. 4wd platform ile yaptigim arabada motorlarin enable ayarlarini 130 kadar verdigimde hicbir motor calismiyor. 130 dan yukari verdigimde ise motorlar cok hizli gidiyor ve cizgi izleyen +engelden kacan oldugu icin engele carpiyor. hizlu oldugundan duramiyor. lipo pil 11.7 volt kullaniyorum. bunun sebebi ne olabilir? yani motor hizini 100 neden yapamiyorum. tesekkur ederim
arduinoya proramı yüklerken bu hatayı alıyorum
yardımcı olabilr misiniz
Arduino:1.8.8 (Windows 7), Kart:”Arduino Leonardo”
Çalışmanız programın 6258 bayt (21 %) saklama alanını kullandı. Maksimum 28672 bayt.
Global değişkenler belleğin 155 byte kadarını (6%) kullanıyor. Yerel değişkenler için 2405 byte yer kalıyor. En fazla 2560 byte kullanılabilir.
avrdude: butterfly_recv(): programmer is not responding
avrdude: butterfly_recv(): programmer is not responding
avrdude: butterfly_recv(): programmer is not responding
avrdude: butterfly_recv(): programmer is not responding
avrdude: butterfly_recv(): programmer is not responding
Found programmer: Id = “ş”; type = È
Karta yüklenirken sorun oluştu. Tavsiyeler için http://www.arduino.cc/en/Guide/Troubleshooting#upload adresine göz atabilirsiniz.
Software Version = (.
Arkadaşlar yaptığımız robot sadece sağ tarafından kendi etrafında dönüyor.10″dan fazla kod yazdık fakat çözüme ulaşamadık.Sorunu bilen varsa çözümü yazabşlirmi iyi günler
İyi günler biz bitirme projesi yapıyoruz ve engel algılayan robot yaptık fakat basit düzeyde olduğu için robotu uçurmak istiyoruz bunu nasıl yapabiliriz.Yardımcı olurmusunuz
Acil….!!!!
Şerit takip sistemine mesafe dengeleyici ekledim fakat hangi kodu yazicagimi bilemedim. Kodun istediğim işlevi ise önüne herhangi bir engele 4 cm kadar yaklaştığında durması engeli kaldirdigimda ise yine seridini takip etmesi… Yardımcı olabilir misiniz ?
Devreyi besledigimde ardiuno ve motor devresi uzerindeki isiklar yaniyo sensore elimi yaklastirdigimda ışıklar yanip sonuyo falat motorlar calismiyor sebebi nedir ?
Bu devrede büyük bir eksiklik var. Belki dikkatten kaçmıştır. Devre bağlantısında aurdinonuya enerji verilmemiş.
Bunu çözmek için:
1-Ya aurdinonun jack girişinden 9V bir pil daha bağlamak, yani devrede iki 9 volt pil olacak. Bu durumda piller daha uzun gider.
2-Motor sürücü kartın(kırmızı kart) 5V çıkışından bir kablo ille (erkek-erkek jumper kablosu) arduinonun 5v ucunu birleştirmek.
NOT: Robotunuz 360 derece dönüyorsa motorlardan geriye doğru dönenin kablolarının yerini değiştirin.( HC04 ün bulunuduğu yönün tersine). Basit anlattım ki elektronikten anlamayan olabilir diye.
sizden aldığım servo motor bağlantıları doğru yapmama rağmen ısınıyor.
LÜTFEN CEVAP VERİN !!!
Kurulumda kodlarda aynı fakat sağ teker bazen çalışıp bazen dururken sol teker hiç kıpırdamıyor. Sebebi nedir çözüm ne olabilir?
Teşekkür ederim şimdiden.
Ben kodları yükledim pin bağlantıları her şeyi yaptım ama robot düzgünce ileri doğru gidiyor ama önüne engel çıkınca algılıyor ama tekleyerek öne doğru gitmeye devam ediyor ne gibi bir sorun olabilir acaba?
abi kod aynısını yazıyorum kod hatalı diyor
selam
Çoğu arkadaş gibi sorun yaşadım. SORUN: Aurdino nun beslemesi yok bu şekilde çalışmaz yada garip hareketler yapıyor.Şemaya aurdino için pil koyar mısınız yada vin girişi ile nasıl beslenir bilgi verir misiniz?
Araba havada tuttuğumda tekerlekler ileri doğru gidiyor yere koyduğum anda ya kendi etrafında dönüyor ya da saçmalıyor, arkadaki sarhoş tekerlekten mi kaynaklanıyor acaba bir türlü çözemedim
merhaba
altıgen yada sekizgen bir odada çalışabilir mi? duvarlar arasındaki açı 90 dereceden büyük olduğunda çalışma hassasiyeti ne olur?
hangi jumper den alıcaz .dişi dişi mi .erkek ereke mi
Peki bu kodlama uygulaması hangisi…
İyi günler. Bu projede L298n yerine L293D kullanılabilir mi ? Kullanılabilir ise nasıl kullanılır?
merhaba,ben öğrenciyim ve yaptığınız her şeyi yaptım fakat kod yüklenmesine rağmen arabamda kıpırtı yok.İlk önce kodda sıkıntı var diye düşündüm ama kodu kopyala yapıştır yaptım ve hiç sorun çıkmadı (kontrolde ettim)
yardım edebilir misiniz? Fotoğrafını atabilirim. çok acil lazım.
pinMode(MotorL1, OUTPUT);
pinMode(MotorL2, OUTPUT);
pinMode(MotorLE, OUTPUT); //Motorlarımızı çıkış olarak tanımlıyoruz.
pinMode(MotorR1, OUTPUT);
pinMode(MotorR2, OUTPUT);
pinMode(MotorRE, OUTPUT);
hata bulada
pinMode(MotorR1, OUTPUT);
pinMode(MotoR2, OUTPUT);
pinMode(MotorRE, OUTPUT); //Motorlarımızı çıkış olarak tanımlıyoruz.
pinMode(MotorL1, OUTPUT);
pinMode(MotorL2, OUTPUT);
pinMode(MotorLE, OUTPUT);
DOĞLUSU BU DEĞİŞTİLİN çalişaçak
Aynısını yaptım ama tekerlekler dönmüyor neden olabilir dönmeme sebebi
tek bağlantı ile tüm kodlar çalışsa daha iyi olur…
bluetooth ile çalışan araba yaptım. şimdi bu projeyi yapmak istiyorum, motor sürücü bağlantılarını sürekli değiştiriyorum. sadece kodları telefon ile değiştirip istediğim modu kullanabilirim. önerim her kodu kullanabileceğimiz tek bağlantı şemalı projeler yapmanız..
Bu sayfanın yardımcı olduğu felan yok boşa yazmayın
Kodları değiştirmeden raspberry pi de çalıştırabilir miyim?
Değiştirmeden çalıştırmanız mümkün değildir. Raspberry Pi ile yapabileceğiniz örnek bir mobil robot projesi için bu yazıyı inceleyebilirsiniz:
Raspberry Pi Tabanlı Kameralı Wi-Fi Robot
bir tekerlek dönüyor ama diğeri dönmüyor kabloları değiştirdim devre doğru ne yapabilirim?
sürekli geri gidiyor sinyal almıyor l298n den bir ses geliyor ikisinede 9 vol t verdim
arduino ve l298n nin eksi ve artılarını birleştirince tek pil ikisinede yetiyor bu devrede öyle yaparsam çalışırmı
L298N kartınız üzerinde 5V çıkışı mevcut ise Arduino’nuzu bu 5V kaynaktan besleyebilirsiniz. Sürücü kartı üzerindeki 5V ile Arudino üzerindeki 5V pinine bağlantı yaparak bu şekilde bir kullanım sağlayabilirsiniz. Ya da pilin + bağlantısını Arduino’nuzun Vin pinine bağlayabilirsiniz.
çok teşekkürler çok iyi
4 tekerlekli araç kitini kullanıyorum ancak araç sağa dönerken sağ tekerler geriye dönüyor sol tekerler takılma yaşıyor, ileri hareket ederken geri dönüş uyguluyor kısa bir süre. Videodaki kodun aynısını kullandım yardımcı olur musunuz.
Motorların dönüş yönünü tersine çevirmek için motordan çıkan 2 adet kabloyu motor sürücüsüne yaptığınız bağlantıların yerlerini değiştirmeniz yeterlidir. Takılma sorununuz için ise robotu düz ve sert bir zeminde kullanmayı deneyin ve kullandığınız pillerin tam dolu olduğunundan emin olunuz.
Merhaba herşey ogretdiginz gibi montajını yaptım fakat çalışmıyor rx ışığı sürekli yanıp sönüyor on ışığı sabit yanıyor şimdiden yardımlarınız için teşekkür ederim
Çizgi izleyen robot üzerine mesafe sensörü ve kodlarını ekledim çalışmada hata alıyorum nasıl düzeltebilirim
arduıno pil ile çalışmıyor
abi ben yaptım her şey oldu ama motorlar donmuyor ne yapmalıyım
abi çok güzel olmuş ellerinize sağlık ben bu malzemeleri robotistan.com dan aldım ve bu projeyi yaptım bende sizi takib ederek yaptım çok güzel oldu.
yalnız bu projeyi servolu nasıl yapabiliriz acaba.
sensör nesne görünce RX yanıp sönüyo ama motorlar hiç çalışmıyo acilll
Motorların donanımsal ve yazılımsal bağlantılarını doğru yaptığınızdan emin misiniz acaba?
şimdi motorsürücü kapanmış açtım RX – L hızlıca yanıp sönüyo arduinoda sensör tepkide vermiyo motorlarda çalışmıyo
Merhaba benim sizden aldığım ürünler ve kod çalışıyor ama 9 v luk pil yetmedi bende bir 9v u l298 e diğer 9v u ardinioya taktım 5 dakka sorunsuz çalıştı ve pil aşırı ısındı gücü bitti şuan motoru bile zor döndürüyor yardım ederseniz sevinirim
Öncelikle kaliteli bir marka pil kullanmanızı, hatta imkan varsa Li-Po veya Li-Ion pil kullanmanızı öneririm. Zorlanma sırasında fazla akım çekme gibi bir şey yaşayabilirsiniz. Pil konusunu çözdükten sonra bizlerle tekrar iletişime geçebilirsiniz.
Ardunionun içine kodları atamıyorum hata veriyor ne yapmam gerekiyor yardımcısı olabilirmisiniz?
Ne hatası alıyorsunuz acaba? Arduino kart ayarlarını yaptınız mı acaba?
ardunio ide de port seçmem gerekiyor ama bir türlü aktifleştirmeyi başaramadım farklı bir bilgisayardan denediğimde portla ilgili bir problem oluşmadı ama yüklemeye çalışınca taslak yüklenemedi diyor.
Gerekli sürücüyü yüklemediğiniz için olabilir. CH340 veya FTD232 sürücülerinden uygun olanını yüklerseniz sorunun çözüleceğini düşünüyorum.
Merhabalar L298N kartında 12v yerine 5v luk kullandım ve 5v u direk Arduino ya bağladım, enerji aldım(L298N üzerinde ışıklar yandı) ama motorları çalıştıramadım motorları nasıl çalıştırabilirim (2 tane motor kullandım)
ya da Arduino üzerinden direk 12v enerji alabilir miyim?
L298N motor sürücü üzerindeki +12V veya VIN kısmından gerekli gücü bağladıktan sonra paralel olarak Arduino’ya da oradan güç aktarımı yapmanızı tavsiye ederim. Bu şekilde sistem daha kararlı çalışacaktır. Güç aktarımı yaparken eksi (-) hattı ortak yapmayı unutmayınız.
Güç sistemini kurarken ise alkalin pil yerine şarjlı bir pil pil kullanmanız, sistemin devamlılığı açısından önem arz etmektedir.
teşekkürler
Ben yaptım ama tek tekerlek dönmüyor
Sistem bileşenlerini tek tek kontrol etmeyi denediniz mi?
Gezegen
MErhabalar
BEn sizden tum gereken parcaları aldım yaptım robotu ileri gidiyo ama engel gordugunde geri gitmesi gerekirken sag motor geri gidiyo sol motor ise ileri gidiyo kod sunlar
#define echoPin 12 //Ultrasonik sensörün echo pini Arduino’nun 12.pinine
#define trigPin 13 //Ultrasonik sensörün trig pini Arduino’nun 13.pinine tanımlandı.
#define MotorR1 7
#define MotorR2 6
#define MotorRE 9 // Motor pinlerini tanımlıyoruz.
#define MotorL1 5
#define MotorL2 4
#define MotorLE 3
long sure, uzaklik; //süre ve uzaklık diye iki değişken tanımlıyoruz.
void setup() {
// ultrasonik sensör Trig pininden ses dalgaları gönderdiği için OUTPUT (Çıkış),
// bu dalgaları Echo pini ile geri aldığı için INPUT (Giriş) olarak tanımlanır.
pinMode(echoPin, INPUT);
pinMode(trigPin, OUTPUT);
pinMode(MotorL1, OUTPUT);
pinMode(MotorL2, OUTPUT);
pinMode(MotorLE, OUTPUT); //Motorlarımızı çıkış olarak tanımlıyoruz.
pinMode(MotorR1, OUTPUT);
pinMode(MotorR2, OUTPUT);
pinMode(MotorRE, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(trigPin, LOW); //sensör pasif hale getirildi
delayMicroseconds(5);
digitalWrite(trigPin, HIGH); //Sensore ses dalgasının üretmesi için emir verildi
delayMicroseconds(10);
digitalWrite(trigPin, LOW); //Yeni dalgaların üretilmemesi için trig pini LOW konumuna getirildi
sure = pulseIn(echoPin, HIGH); //ses dalgasının geri dönmesi için geçen sure ölçülüyor
uzaklik = sure / 29.1 / 2; //ölçülen süre uzaklığa çevriliyor
Serial.println(uzaklik);
if (uzaklik < 30) // Uzaklık 15'den küçük ise,
{
geri(); // 150 ms geri git
delay(100);
sag(); // 250 ms sağa dön
delay(250);
}
else { // değil ise,
ileri(); // ileri git
}
}
void ileri(){ // Robotun ileri yönde hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, HIGH); // Sağ motorun ileri hareketi aktif
digitalWrite(MotorR2, LOW); // Sağ motorun geri hareketi pasif
analogWrite(MotorRE, 100); // Sağ motorun hızı 150
digitalWrite(MotorL1, HIGH); // Sol motorun ileri hareketi aktif
digitalWrite(MotorL2, LOW); // Sol motorun geri hareketi pasif
analogWrite(MotorLE, 100); // Sol motorun hızı 150
}
void sag(){ // Robotun sağa dönme hareketi için fonksiyon tanımlıyoruz.
digitalWrite(MotorR1, HIGH); // Sağ motorun ileri hareketi aktif
digitalWrite(MotorR2, LOW); // Sağ motorun geri hareketi pasif
analogWrite(MotorRE, 0); // Sağ motorun hızı 0 (Motor duruyor)
digitalWrite(MotorL1, HIGH); // Sol motorun ileri hareketi aktif
digitalWrite(MotorL2, LOW); // Sol motorun geri hareketi pasif
analogWrite(MotorLE, 150); // Sol motorun hızı 150
}
void geri(){ // Robotun geri yönde hareketi için fonksiyon tanımlıyoruz.v
digitalWrite(MotorR1, LOW); // Sağ motorun ileri hareketi pasif
digitalWrite(MotorR2, HIGH); // Sağ motorun geri hareketi aktif
analogWrite(MotorRE, 100); // Sağ motorun hızı 150
digitalWrite(MotorL1, LOW); // Sol motorun ileri hareketi pasif
digitalWrite(MotorL2, HIGH); // Sol motorun geri hareketi aktif
analogWrite(MotorLE, 100); // Sol motorun hızı 150
}
merhaba kodu verdiğiniz şekilde yazdım arduino programinda taratığımda son satır hata veriyor yani
geri komutundaki
analogWrite(MotorLE,150); satıra hatalı olduğunu söylüyor ve algılamıyor daha sistemimi calıştırmadım calıştırdığım taktirde de geri gidmeyecek bana yardımda buluna bilirmisiniz teşekürler
Kodları yazarken biçimsel olarak hata yapmış olabilir misiniz?
Merhaba kontrolünü sağladım ve hatta sitedeki bütün kodu kopyala yapıştır yaptım aynı hatayı verdi YouTube kanalında da hata yapıldığı yazılmış ama düzeltme yapamadım yardımcı olma şansınız varsa çok sevinirim teşekkürler
cok güzel bir calisma. emeğinize sağlık
merhaba bende herşeyi düzgün bir şekilde yaptım ama ultrasoniksensör 0 ölçümü yapıyor <15 yerine <-15 yapınca sadece düz gidiyor
Mesafe sensörünüz bağlantılarını yanlış yapmış olabilirsiniz.
Kodlama kısmında herhangi bir problem yaşadınız mı benim kodlamamı kabul etmiyor sistem son satırda hata veriyor sizde böyle bir problemle karşılaştınız mı
klemens olmadan nasıl bağlayabilirim pil yatağının kablolarını
Bunu çok tavsiye etmiyorum. Bağlantı yaparken pil kabloları başlıklardan ayrılabilir ve kısa devre olma ihtimali doğabilir.
Videodaki pili baglama şekli ile semadaki farklı semadakini yapsam sıkıntı çıkarmı cunkuarduinoya pilisadece gnc ile bağlıyoruz
GND’ler ortak olacak şekilde bağlantı yapmalısınız. Bir sorunuz olursa buradan yine yazınız 🙂
semadaki ve videodaki pil bağlama sekli farklı hangisini tavsiye edersiniz
9V bir pil ile her iki kaynağı da besleyebilirsiniz. Eksi (-) hattı ortak yapmayı unutmayınız 🙂
Her şeyi aynı yaptım ama bir teker bi ileri bi geri gidiyor
Ters çalıştığını düşündüğünüz tekerleklerin kablo bağlantılarını ters yapmayı deneyiniz.
Projeyi yaptım ama tek farkım ben sizin gibi l298n yi 12v varta marka alkali pil ile besledim. Motorlar hiç çalışmıyor ileri, geri, sağ, sol gram haraket yok. Kodlarla ayarlamaya çalıştım yine hiç haraket yok. Daha önce aynı projeyi yapmıştım ama sadece 9v pil ile hem arduinoyu hemde l298n kartını beslemeye çalıştım ve pilin gücüyetmedi. Motorlar tık, tık, tık diye hafif hafif dönüyodu ve içinden ses çıkıyodu şimdi hiç çalışmıyo :(.
GND’leri ortak, güç bağlantılarınızı doğru ve sağlam yaptığınızdan emin olunuz.
merhabalar öncelikle engelden kaçan robot yaptım sorunsuz bir şekilde ama 2. ultrasonik mesafe sensoru ekleyebilirmiyim nasıl yaparım yardımcı olursanız çok çok memnun olurum
Pinlerin doluluk oranına bakmanız gerekiyor, eğer boş pin varsa ekleyebilirsiniz.
Sizin videodakinin aynısını yaptım ama neyin nereye geleceğini bilmiyorum
Ellerinize sağlık çok güzel çalışıyor.
Merhaba iyi günler. ilk defa Arduino kullanıyorum ve kodları yazdığım zaman seri port seçilmedi uyarısını alıyorum. yardımcı olabilir misiniz?
Uygun sürücüyü yüklemeyi ve port seçmeyi unutmayınız.
sizin yaptığınız gibi yaptım her şeyi ama robotum engeli görünce titrer gibi bir hareket yapıyor (hızlı bir şekilde ve olduğu yerde ileri geri hareket ediyor) nasıl çözebilirim???
Şuradaki bloga bakabilirsiniz.
MERHABA VIDEO YAPTIGINI HERSEYI YAPTIM KOD CALISIYOR FAKAT TEKERLEKLERE BAGLI OLAN MOTOR HAREKT ETMIYOR L298N SURUCU KARTININ IŞIGI YANIYOR. MOTORLARI K298N YE BAGLAMADAN DENEDIGIM ZAMAN MOTORLAR CALISIYOR FAKAT L298N SURUCU KARTINA BAGLADIM ZAMAN SADECE ISIGI YANIYOR. BIDE BEN DIREK L298N YE 9V VERDIM ARUDINIYA DA AYRIDAN 9V VERDIM BIRSEY OLURMU
Şuradaki bloga bakarak hatanızı çözebilirsiniz.
kodu yüklüyorum ama kodu uygulamıyor
Motorları, motor sürücüleri vs. ayrı ayrı test edip çalıştığından emin olmalısınız. Şuradaki bloga bakarak hatanızı çözebilirsiniz.
herşeyi harfiyen uygulamama ramen kodu yüklediğimde biiiiiip diye bir ses çıkıyor nedeni ne olabilir