Herkese merhabalar !
Bu yazımızda sizlere şu ana kadar yaptığımız tüm robotlardan çok daha farklı bir proje yapmaya karar verdik. Eğer “ben robot yapmayı biliyorum”, “Raspberry Pi konusunda da kendime güveniyorum” diyorsanız veya “ben bunları öğrenirim” diye düşünüyorsanız (eğer öyleyse sizi blog sayfamızdaki ve kanalımızdaki derslere davet ediyoruz) gelin beraber bu sağlam projenin nasıl yapıldığını öğrenelim.
Raspberry Pi Robot Yapımı
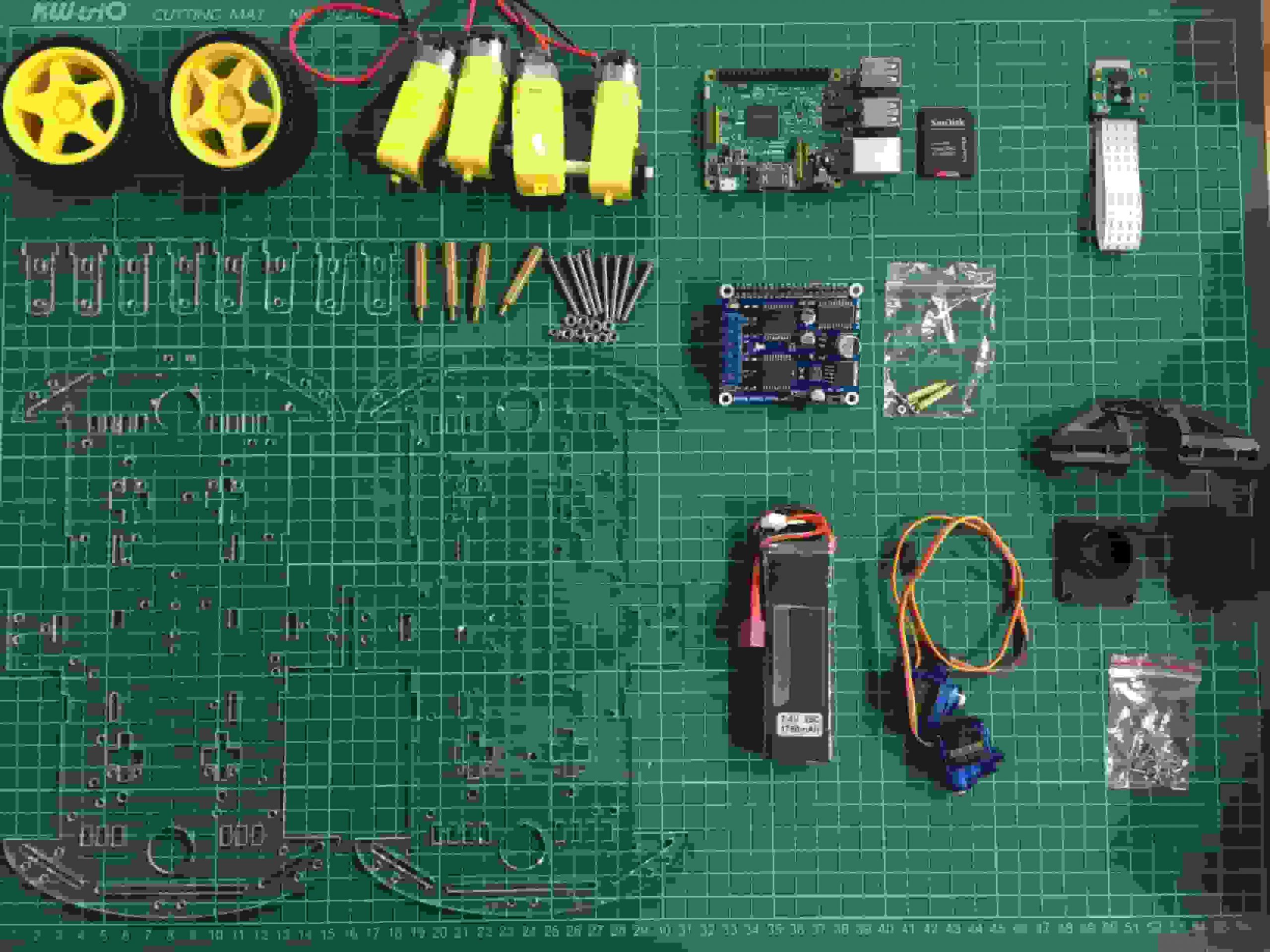
Öncelikle projeden kısaca bahsetmek istiyorum. Daha önce yaptığımız robot projelerinde olduğu gibi bir robot hazırlayacağız. Bu robotu Arduino ile değil, Raspberry Pi ile kontrol edeceğiz. Bunun sebebi, robotu WEB üzerinden kontrol etmek istememiz. Yani robot ile aynı internet ağına bağlanabildiğimiz her yerde kontrol etmeyi amaçlıyoruz. Peki bizden çok uzak, göremediğimiz bir alanda bunu nasıl başaracağız? Tabi ki kamera yardımı ile 🙂 Hadi kullanacağımız malzemeleri inceleyelim.
Malzeme Listesi
- Raspberry Pi 4
- Raspberry Pi Motor Sürücü Shield
- Raspberry Pi Kamera Modülü – V2
- 2 x Servo Motor
- Mini Pan/Tilt Kiti
- 7.4 Li-Po Batarya 1750mAh
- 4WD Çok Amaçlı Mobil Robot Platformu
Robotun Montajı
Raspberry Pi ile işlerimiz tamamlandığında robotu hemen kontrol edebilmemiz için öncelikle robotumuzun gövde montajını ve devre elemanlarının bağlantılarını tamamlayalım. Daha önce Bluetooth Kontrollü Araç ve Kızılötesi Kumanda Kontrollü Robot projelerimizde kullandığımız robot gövdesinin aynı şekilde montajını yapıyoruz.
Montaj işlemine başlamadan önce motorların kablolarını lehimliyoruz. Lehimleme işlemi tamamlandıktan sonra aşağıdaki gibi montaj yapıyoruz. Motorların kablolarını karışıklık olmaması için aynı renkte ve renkleri aynı taraflarda lehimledik. Motorları gövdeye monte ettikten sonra aynı karşılıklı motorların aynı renkteki kablolarını birbirleriyle lehimliyoruz. (Sağ ön motor kırmızı-sağ arka motor kırmızı, sağ ön motor siyah-sağ arka motor siyah gibi)

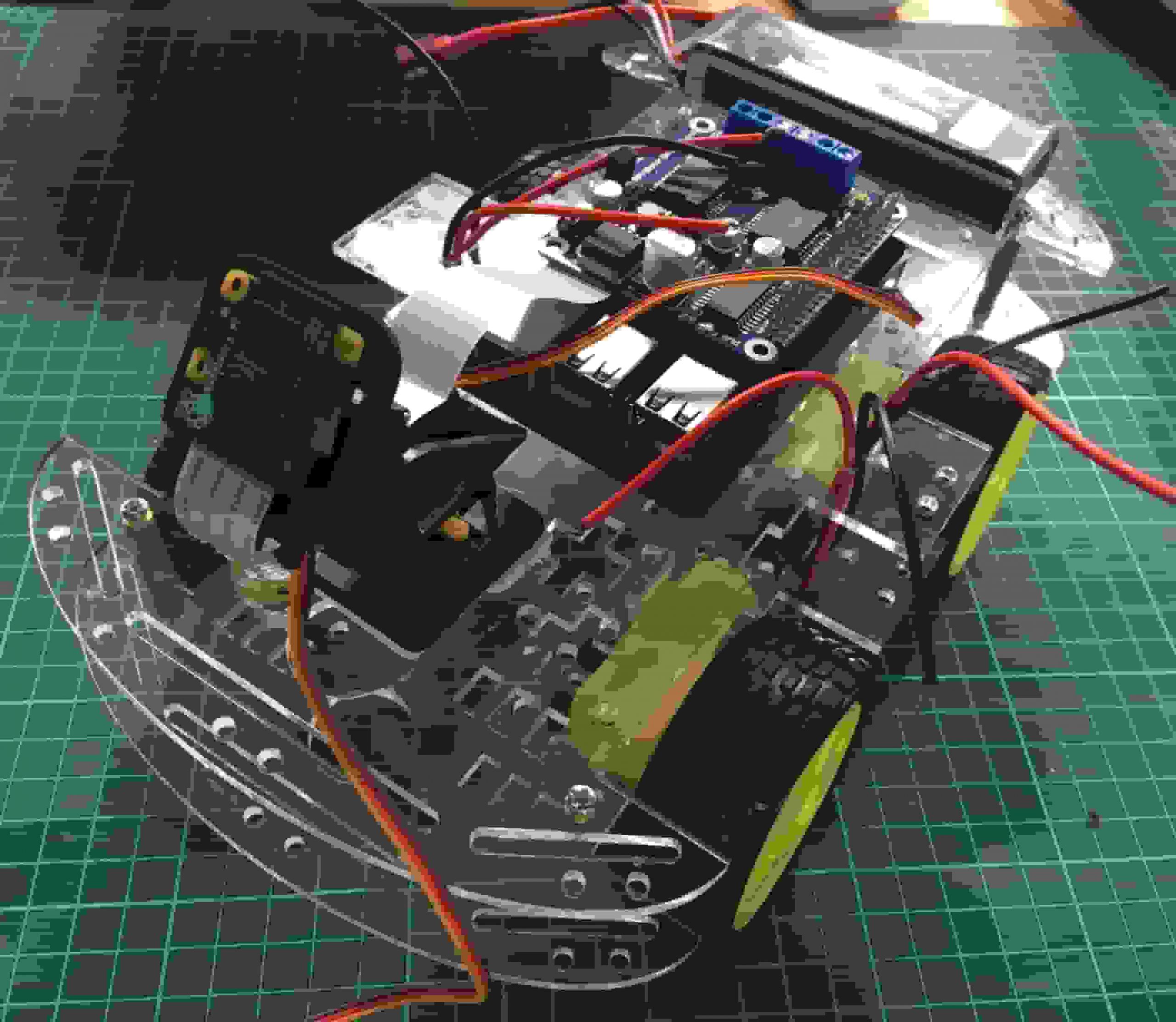
Alt gövdede şimdilik işimiz tamamlandı. Robotun üst gövdesine geçmeden önce pan/tilt sistemini 2 servo ile birleştiriyoruz. Pan/tilt sistemi hazır ise kamera modülünü sisteme sabitleyebiliriz. Bu işlem de tamamlandıktan sonra motor sürücü kartını sabitlediğimiz Raspberry Pi, Li-Po pil ve pan/tilt sistemini üst gövdeye yerleştirebiliriz.
Robotun son hali aşağıdaki gibi olacaktır.
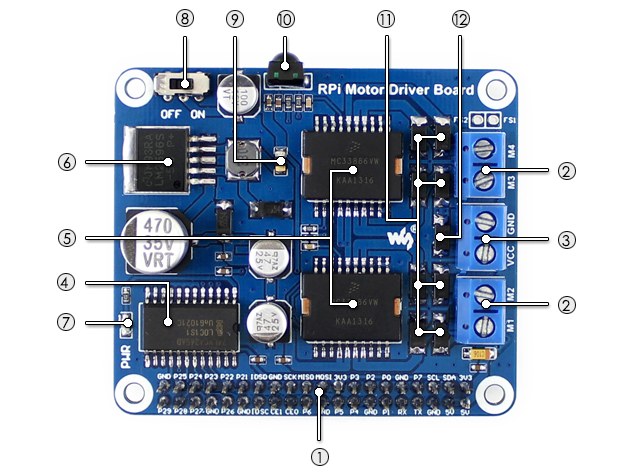
Raspberry Pi Motor Sürücü Shield
Sitemizde özelliklerinden detaylı olarak bahsettiğimiz bu shield sayesinde motor kontrol işlemimiz fazlasıyla kolaylaşmış oluyor. Yapısında bulunan 2 adet klemens çifti ile ayrı ayrı iki motoru veya bu projede yaptığımız gibi paralel bağlanmış 2’şer motoru (toplam 4 motor) iki yönlü kontrol etmek mümkün. Kart üzerinde yer alan 5V regülatör sayesinde Raspberry Pi kartımız çalışması için gerek duyduğu 5V gerilimi USB konnektörüne ihtiyaç kalmadan alabiliyor. Pi’mize giden bu 5V gücü kart üzerinde 8 numara ile gösterilen anahtar ile açıp kapatmamız mümkün. Motor sürücü kartımız shield yapısına sahip olduğundan, Raspberry Pi’nin pinlerine sabitlediğimizde kontrol etmek istediğimiz DC motorlar için ekstra bir kablolama yapmamıza ihtiyaç kalmıyor.
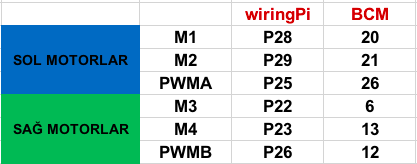
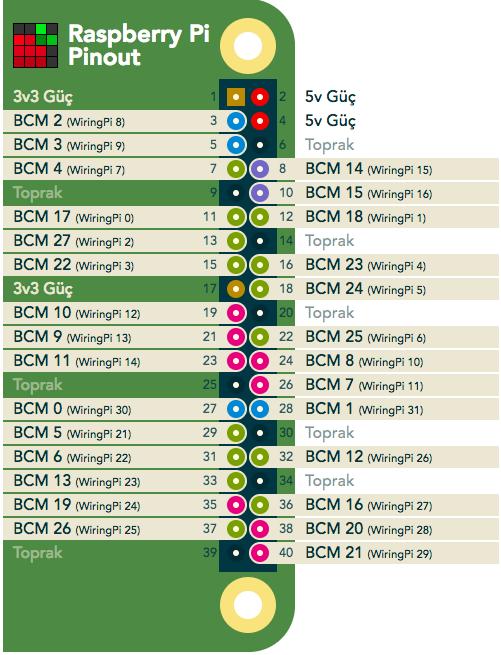
Aşağıdaki tabloda motor bağlantılarının motor sürücü karttaki ve Raspberry Pi pinlerindeki karşılıkları verilmiştir.

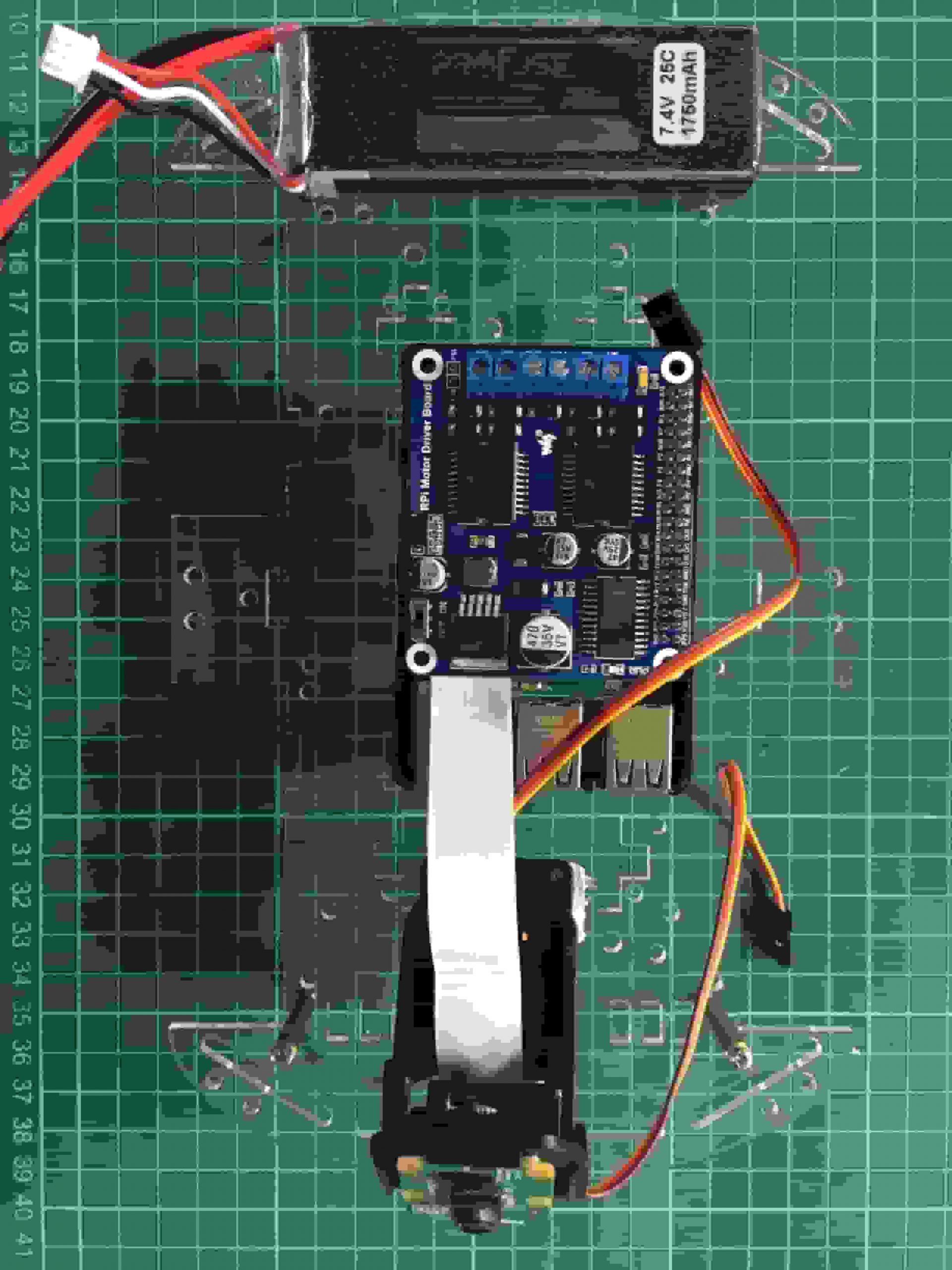
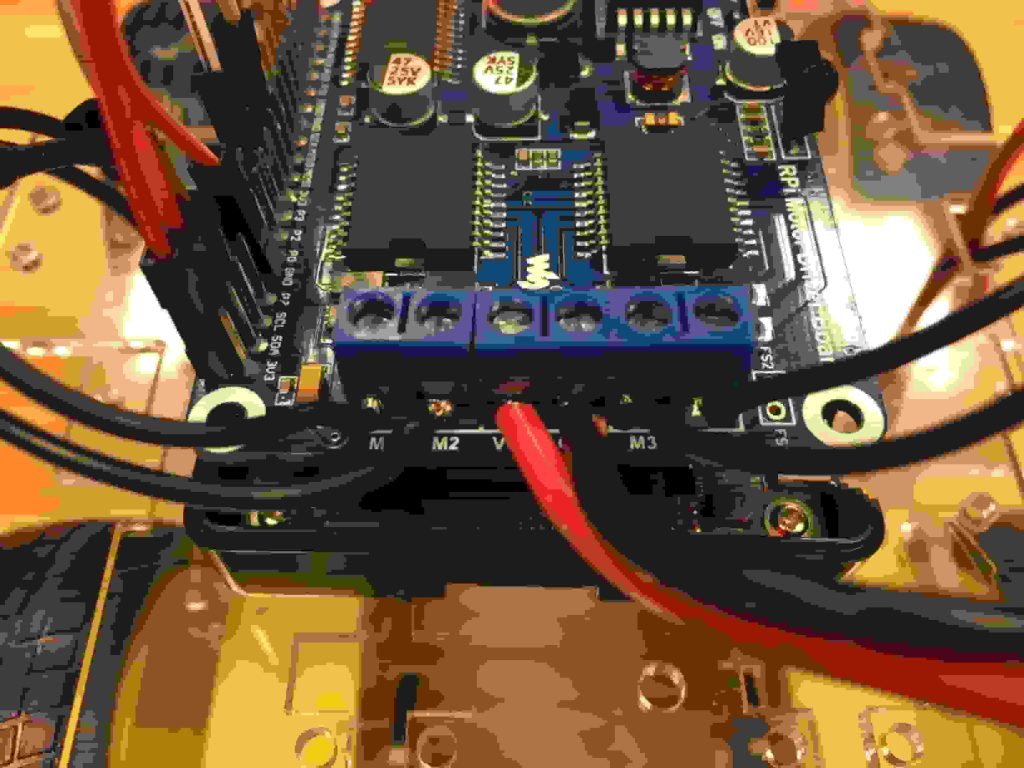
Devre Bağlantıları
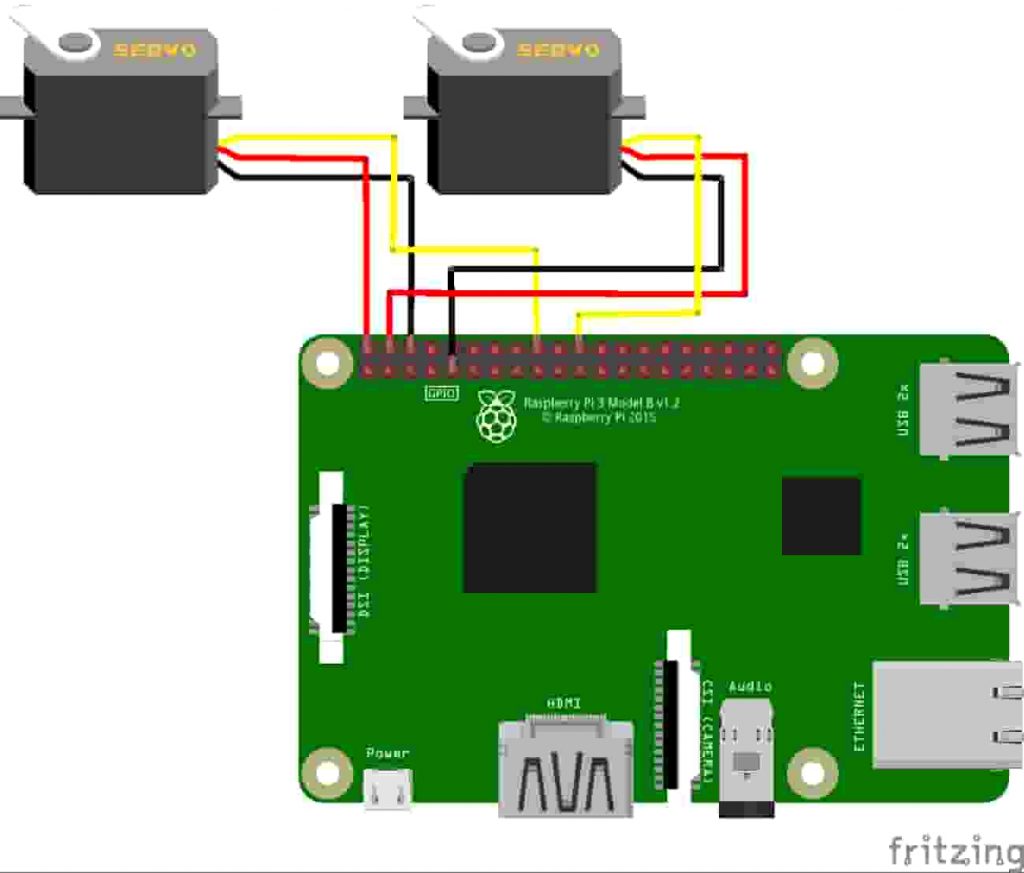
Devre bağlantılarına geldiğimizde motor sürücü shield, Raspberry Pi pinlerine doğrudan oturmaktadır. Arka arkaya karşılıklı DC motorları aynı renkte kablolarla paralel olarak bağlamıştık. Sol taraftaki DC motorları, motor sürücüdeki M1 ve M2 klemenslerine bağlıyoruz; sağ taraftaki DC motorları, motor sürücüdeki M3 ve M4 klemenslerine bağlıyoruz. Ana güç bağlantımızı ise iki motor klemensi arasında yer alan VCC ve GND ile belirtilen bağlantılar aracılığıyla yapıyoruz. Aşağıdaki görselden de kontrol edebilirsiniz.
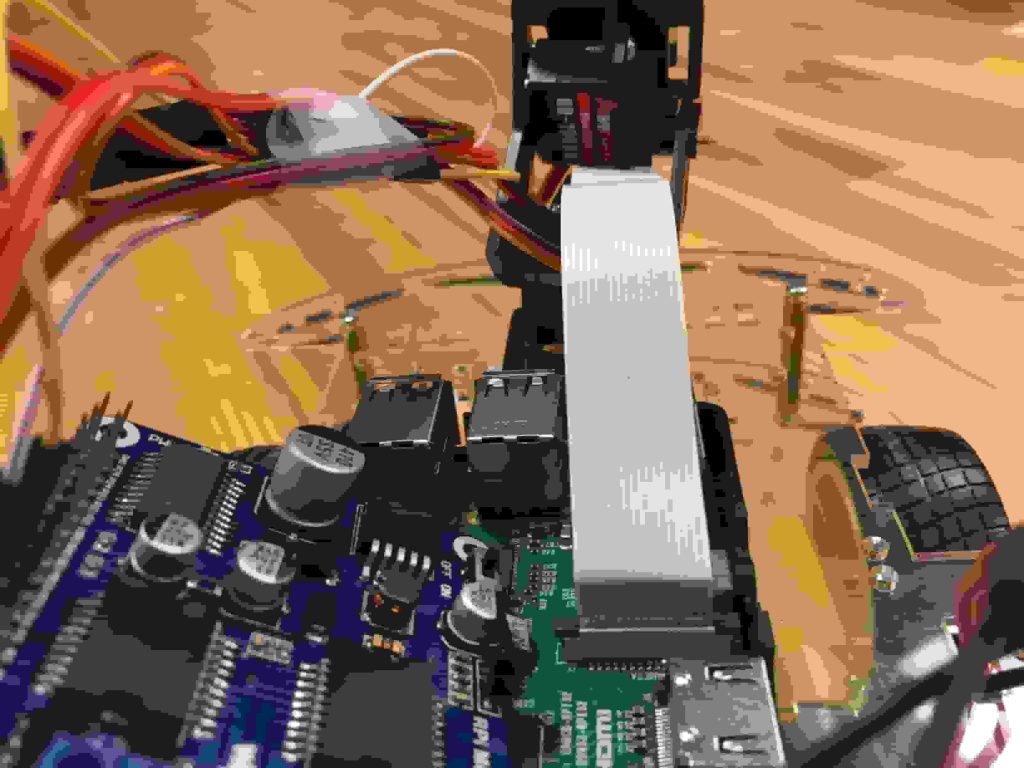
Kamera modülümüzü de Raspberry Pi’mize aşağıda gösterilen şekilde bağlıyoruz:
Motor sürücü kartımızda servolarımız için hazır bir soket bulunmuyor. Bu sebeple servo motorlarımızı jumper kablolar ile shield üzerinde yer alan GPIO pinlerine teker teker bağlamamız gerekiyor:
Robotun donanım kısmı tamamlandı ve programlanmaya hazır hale geldi. Yazının başında söylediğim gibi DC motorları ve servoları Raspberry Pi üzerinden kontrol edeceğiz, çevre kontrolünü de Raspberry Pi kamera modülü ile sağlayacağız. Bu işlemleri web ortamında yapabilmemiz için erişebileceğimiz bir web sunucuya ihtiyacımız olacak.
Web Arayüzü ile Robota Erişim
Sadece programda bulunan IP adresini kendi Pi’nizin IP adresi ile değiştirerek, aşağıdaki işlemleri yapmadan robotu kontrol etmek isterseniz her şeyin hazır olduğu imaj dosyasına buradan ulaşabilirsiniz.
Projemizin çalışması için Raspberry Pi kamera modülüne ihtiyacımız var. Modülü kartımıza güç kesiliyken taktıktan sonra Raspberry Pi’mizi çalıştırıyoruz. Ayrıca, kurulum aşamalarında çeşitli programlar yükleyeceğimiz için Pi’mizin aktif bir internet bağlantısına ihtiyacı vardır.
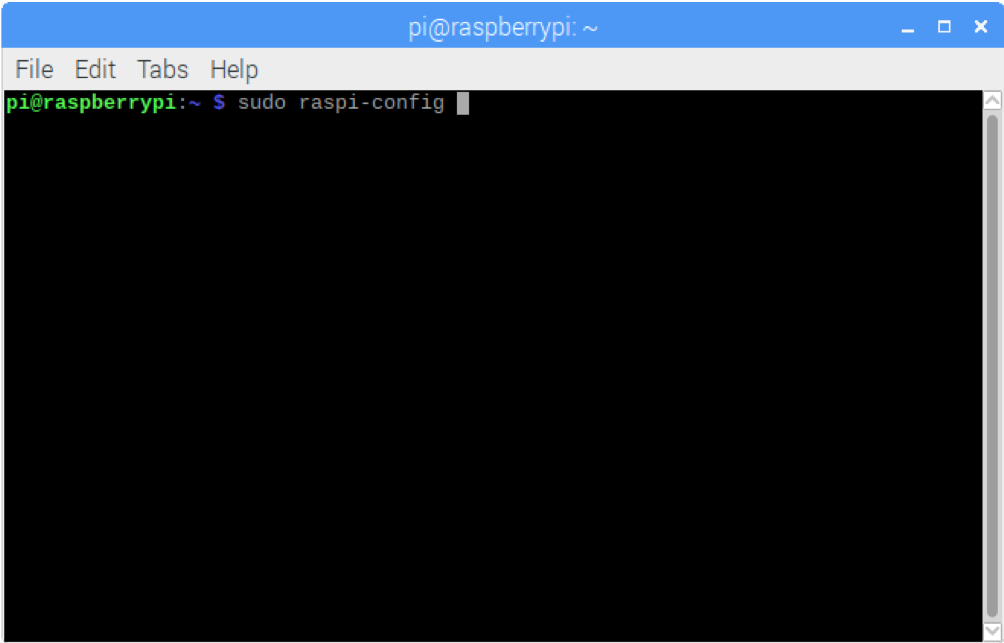
Pi’miz açıldıktan sonra terminal ekranına
sudo raspi-config
yazarak konfigürasyon programını çalıştırıyor ve aşağıdaki adımlar ile kamera modülünü aktif hale getiriyoruz:
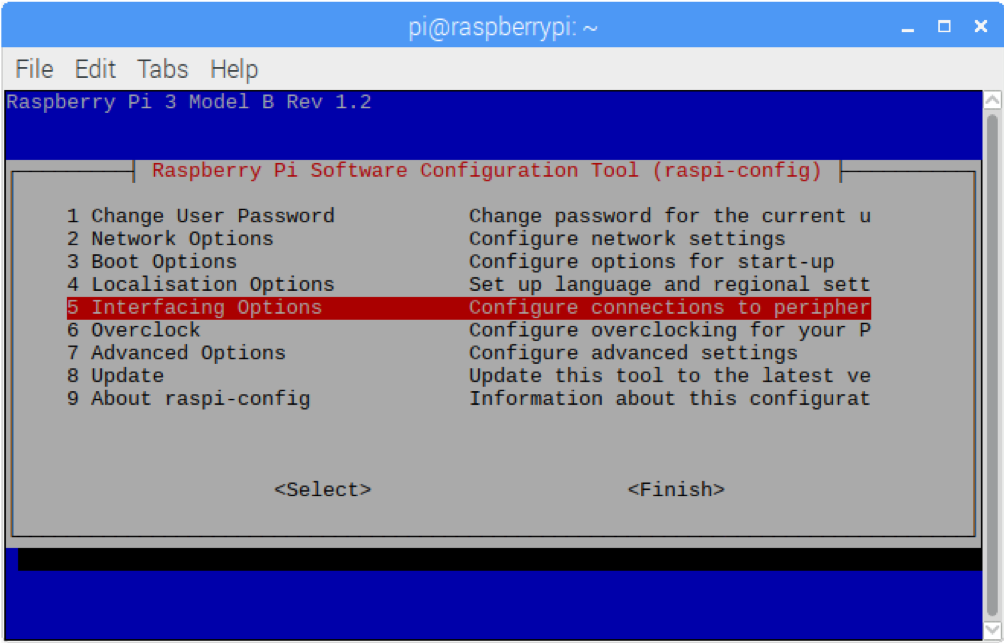
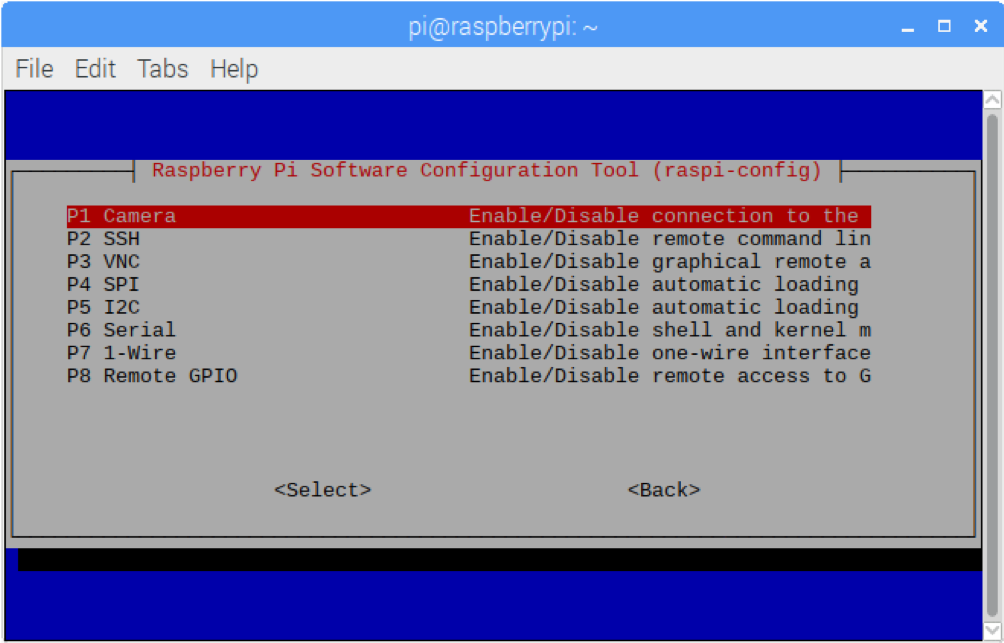
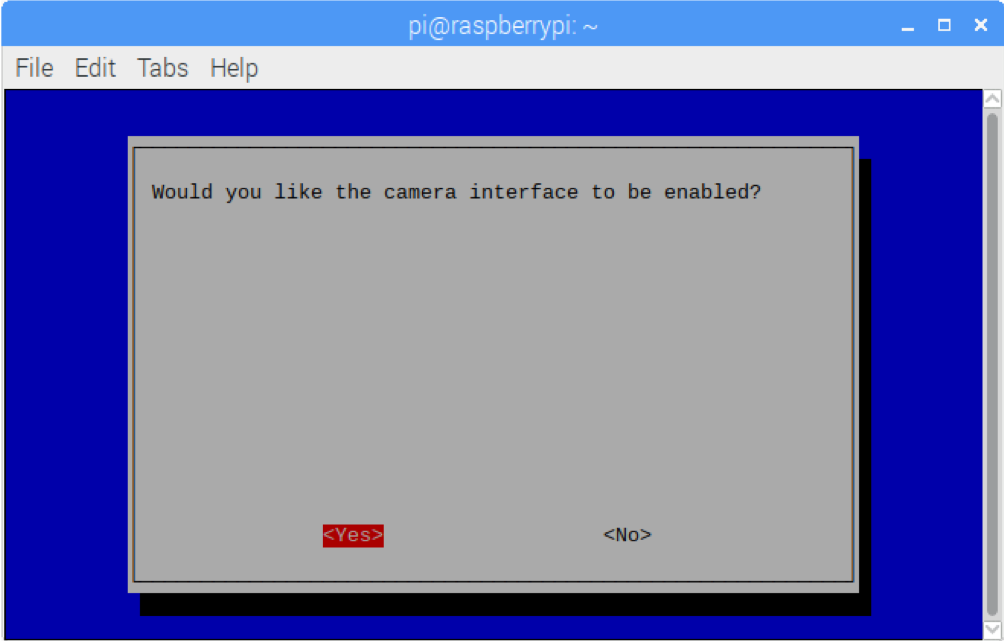
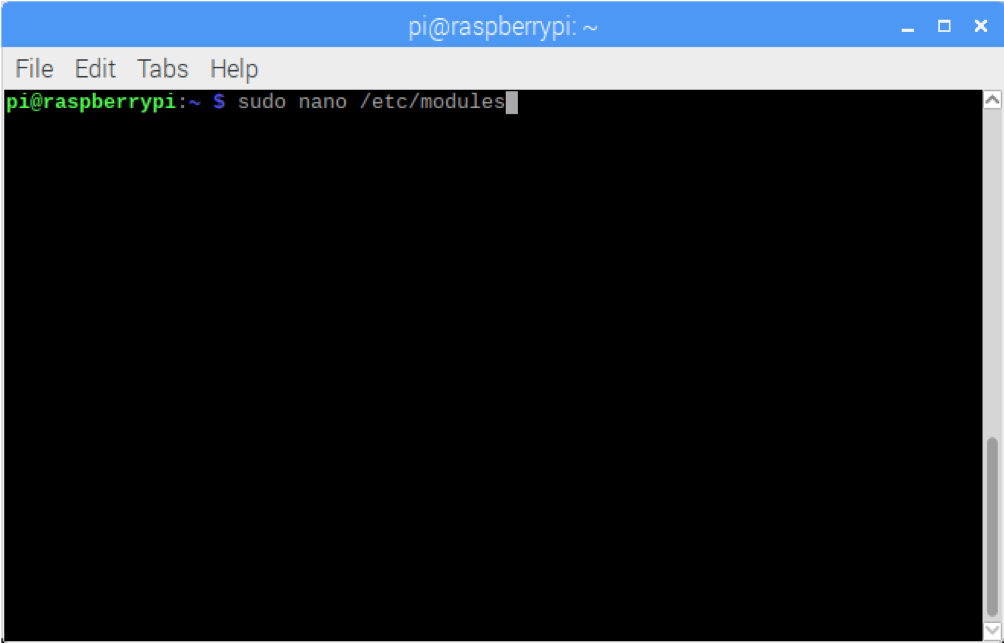
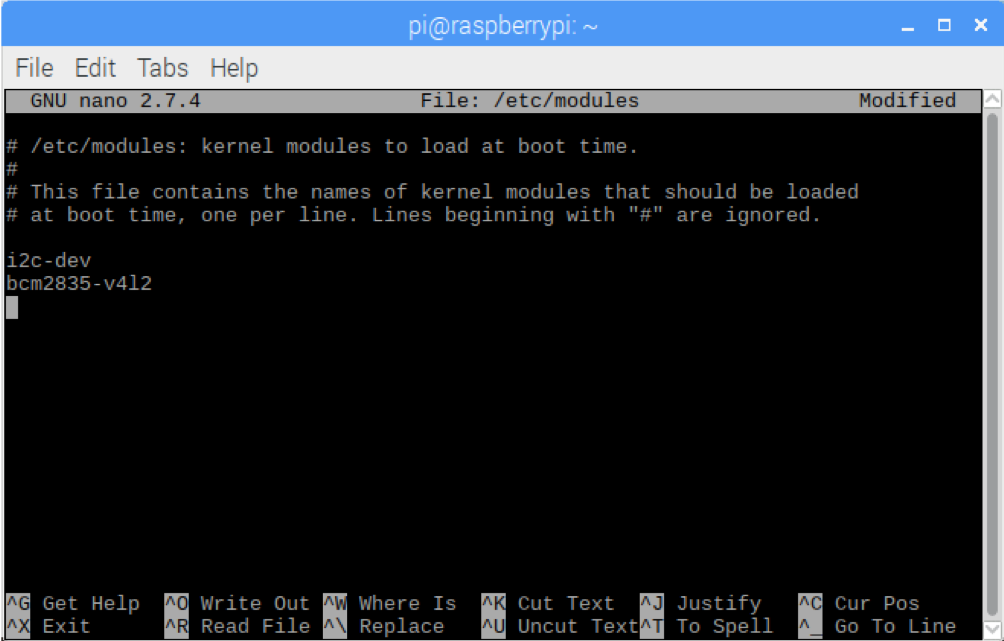
Kamera arayüzünü aktifleştirdikten sonra, kameranın kullanımı için gerekli bcm2835-v4l2 isimli modülü /etc/modules dosyası altına ekliyoruz:
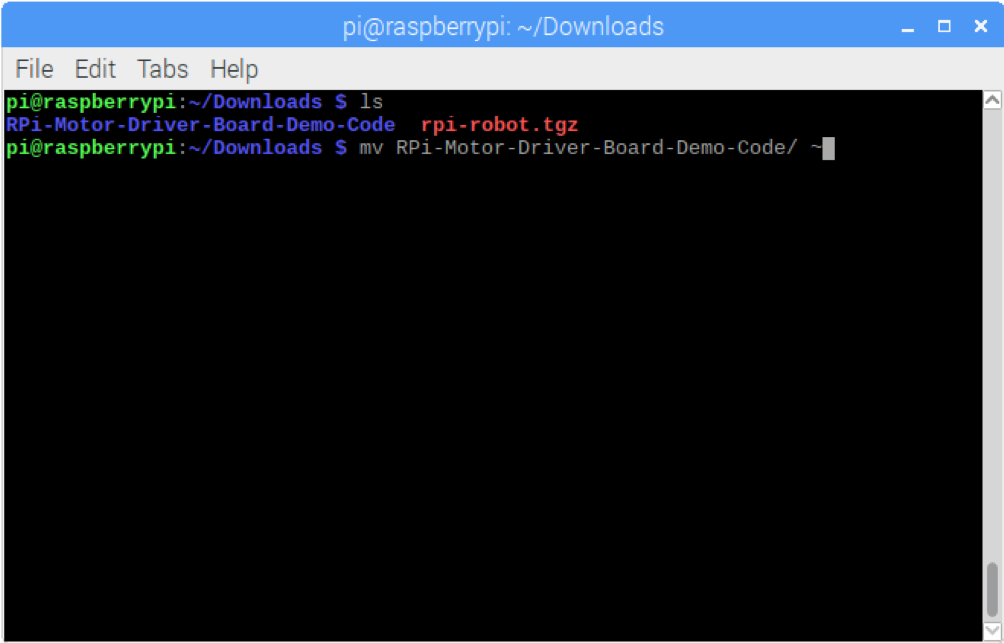
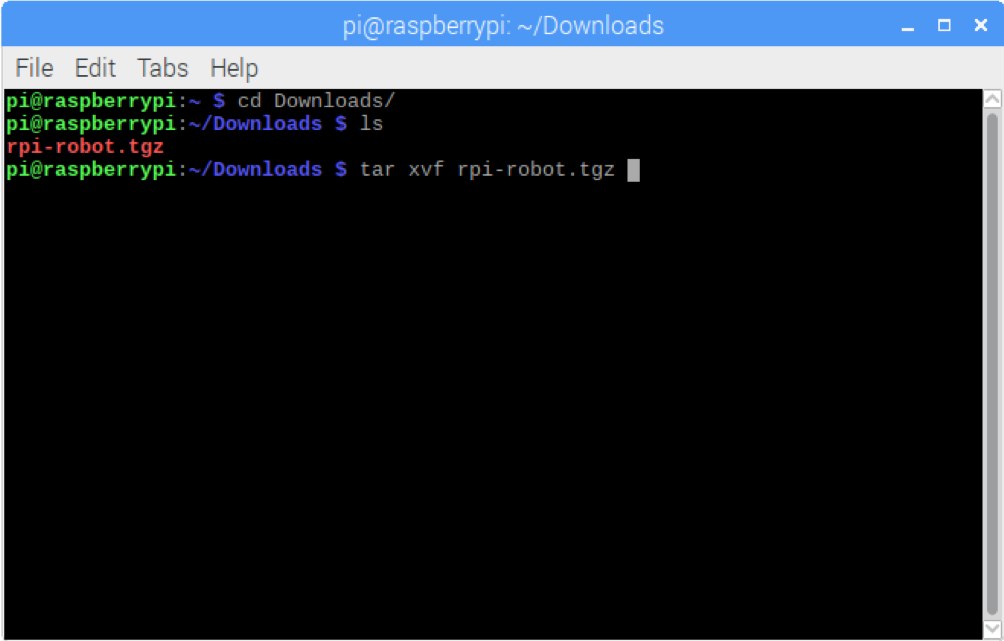
İndirdiğimiz gerekli kütüphaneler dosyasını ana klasörümüz olan /home/pi klasörüne taşıyıp dosyayı aşağıdaki komut ile açıyoruz:
tar xvf rpi-robot.tgz
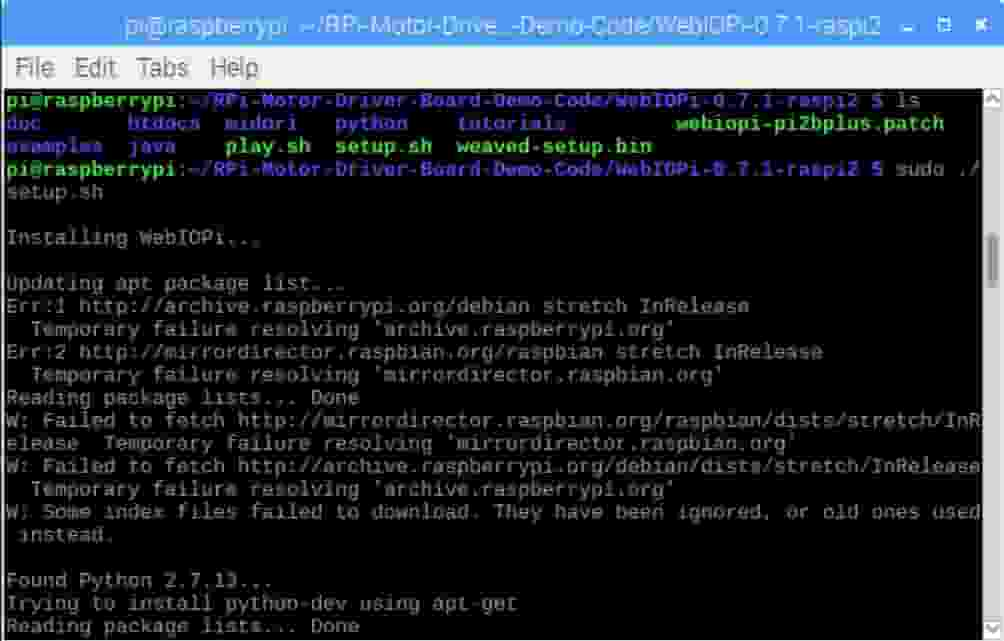
Bir sonraki adımda projemizde gerekli olan webiopi programını ilgili klasöre geçtikten sonra
sudo ./setup.sh
komutu ile yüklüyoruz. Bu esnada Pi’mizin internet bağlantısına sahip olması gereklidir.
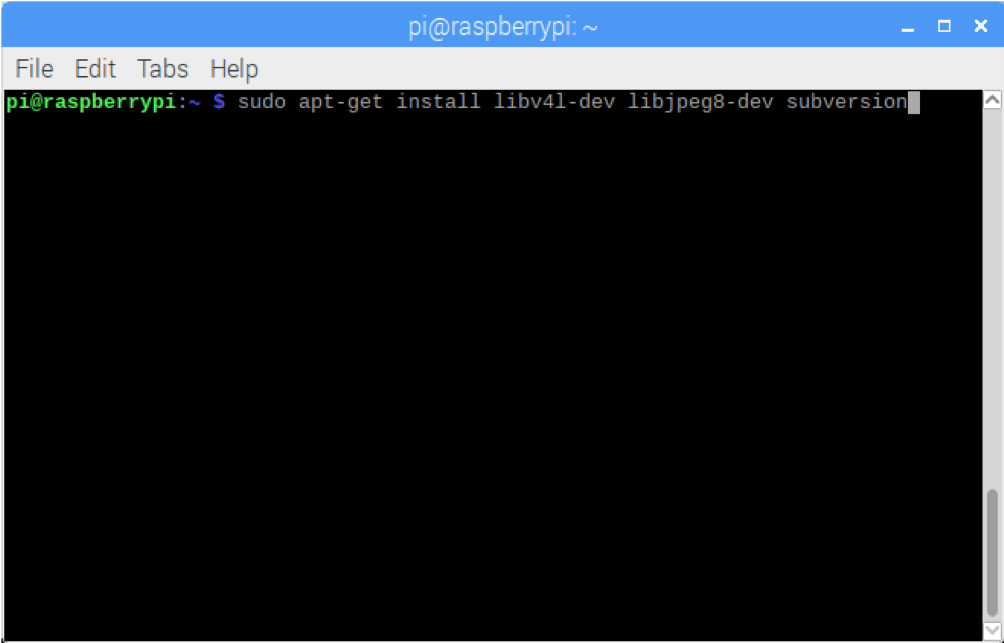
Webiopi kurulumu tamamlandıktan sonra, kameramızın web üzerinden görüntü aktarabilmesi için gerekli olan mjpg-streamer programını kuracağız. Öncelikle gerekli programları aşağıdaki komut ile sistemimize yüklüyoruz:
sudo apt-get install libv4l-dev libjpeg8-dev subversion
Daha sonra ilgili klasöre
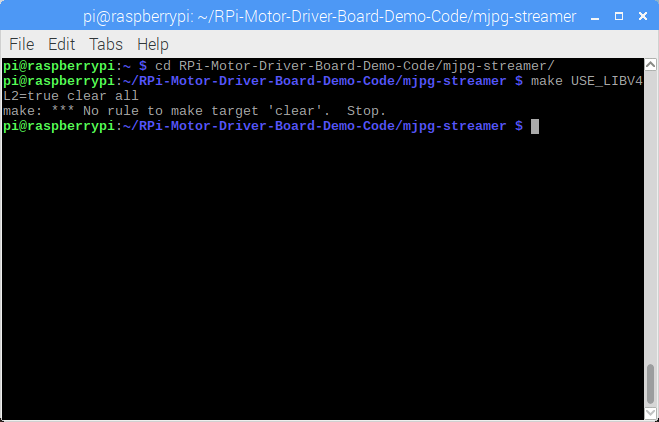
cd ~/Rpi-Motor-Driver-Board-Demo-Code/mjpg-streamer/
komutu ile geçip
make USE_LIBV4L2=true clear all
komutu ile mjpg-streamer programını derliyor ve yüklüyoruz. Bu işlem esnasında “make: *** No rule to make target ‘clear’. Stop.” gibi bir hata alabilirsiniz, herhangi bir sorun olmayacaktır.
Kurulum bittikten sonra
sudo ./start.sh
komutu ile mjpg-streamer programını çalıştırıyoruz. Pi’mizin bağlı olduğu yerel ağa dahil olan başka bir bilgisayardan tarayıcımızı açarak http://raspberry_pi_ip_adresi:8080 adresine girerek kameranın yayınının başladığını görebilirsiniz.
Son aşamada ise robot kontrol programını çalıştıracağız. Programın yer aldığı klasöre
cd ~/Rpi-Motor-Driver-Board-Demo-Code/magpi-cambot
komutu ile geçerek
sudo nano index.html
komutu ile HTML dosyasını açarak içerisindeki bir satırda değişiklik yapmamız gerekiyor.I Burada yer alan IP adresini Pi’mizin yerel ağdaki IP adresi ile değiştiriyoruz:
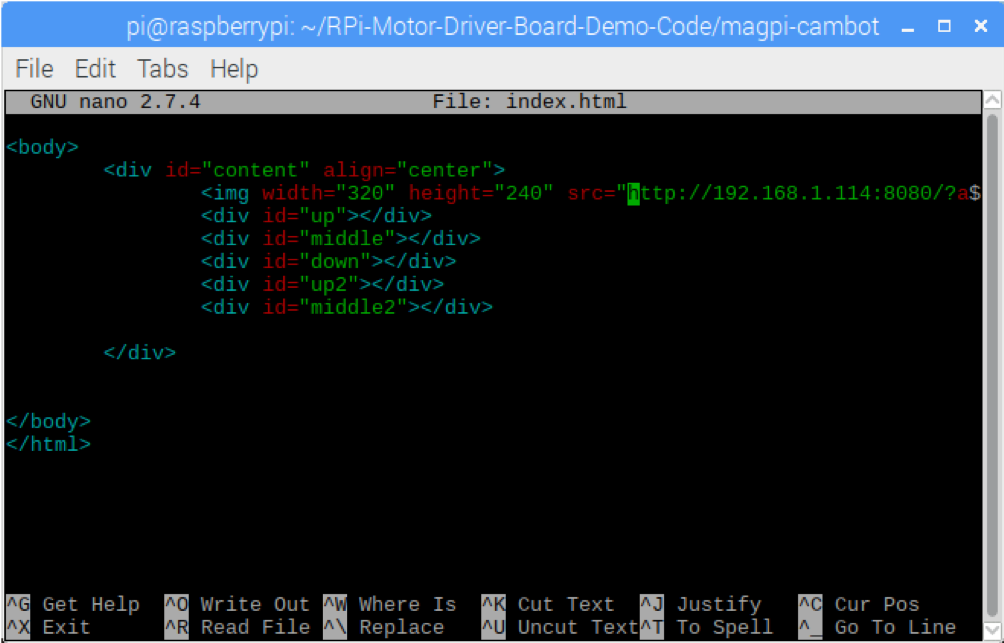
Burada görmüş olduğunuz üzere, biz projemiz üzerinde çalışırken Pi’mizin IP adresi 192.168.1.114 idi. Sizlerin de kendi Pi’nizin IP adresine göre burada yer alan adresi değiştirmeniz gereklidir. Dosyada gerekli değişikliği yaptıktan sonra ise
sudo webiopi -d -c ./config
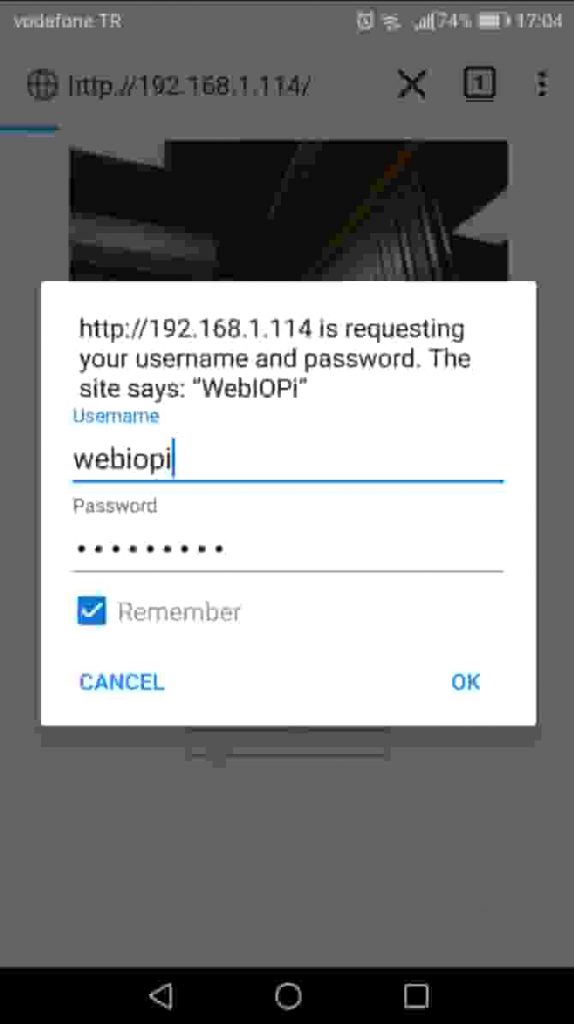
Komutu ile web sunucuyu çalıştırıyoruz. Artık Pi’miz ile aynı yerel ağda bağlı olan bir bilgisayar veya cep telefonu ile tarayıcımızdan Pi’mizin IP adresini yazarak robotumuzu kontrol edebiliriz 🙂
Giriş için şifre istendiğinde kullanıcı adı olarak webiopi şifre olarak ise raspberry girmeniz yeterlidir.
Proje hakkında yorumlarınızı aşağıdaki ‘Yorumlar’ kısmında bizimle paylaşabilirsiniz.
Siz de yaptığınız projeleri Twitter ve Instagram üzerinden #Robotistan hashtagi ile bizimle paylaşabilirsiniz.
Twitter ve Instagram Hesaplarımız: @Robotistan
Raspberry Pi Hakkında Daha Fazlasını Öğrenmeye Devam Et
Raspberry Pi pek çok yönüyle avantaj sahibi ve geliştiriciler tarafından çok sevilen bir platform. Elektronik projelerinde, bilgisayar bilimlerinde ve robotik çalışmalarında sağladığı destek ve rahatlık ile öğrenmeyi sevdiren Raspberry Pi hergün daha da çok gelişiyor. Peki siz de daha fazla gelişmek istemez misiniz? Linux bilginizi geliştirmek, elektronik dünyasına atılmak ve eğlenceli projelere imza atmak için sizi Raspberry Pi ile yolculuğa çıkarıyoruz! Sizler için hazırladığımız Raspberry Pi eğitim serisine devam edin :
Raspberry Pi ile Nesne Tanımlama
RecogPi, Raspberry Pi’ye taktığımız kamera vasıtasıyla o an görüntülenen nesne Tensorflow’a analiz etmesi için gönderilir. Analiz sonucu daha önceden Tensorflow’a öğretilen nesnelerle karşılaştırılır. Karşılaştırma sonucu Tensorflow bize nesnenin ne olacağına dair beş tane tahmin sunar ve bu tahminleri gösterdiğimiz nesneye benzeme oranına göre puanlandırır.Raspberry Pi ile Nesne Tanımlama yazımızdan proje tarifine ulaşabilirsiniz.







Telefonundaki ivmeölçer ya da bilgisayarından klavye ile yaptığı arabayı kontrol etmek isteyen olursa, aşağıdaki projemi inceleyebilir.
https://github.com/laszlokuehl/awesome-car
Güzel proje tebrikler 🙂 Burada paylaştığınız için teşekkür ederiz.
Haberleşmeyi nasıl sağlıyorsun?
çok güzel bir proje olmuş. yerel internette çalıştırdım ama bir sorum var işyerinden bağlanıp kontrol etmek için ne gibi değişiklikler yapmak lazım port açmak lazım herhalde hangi port ve nasıl bağlanabiliriz. şimdiden cevabın için tesekkür ederim . ıyı çalışmalar basarılar dilerim yeni projelerde
tebrikler çok güzel proje olmuş denedim mükemmel çalışıyor.Acaba bunu işyerimden bağlanmak için ne gibi değişiklikler yapmam lazım. iyi çalışmalar
Öncelikle Raspberry Pi’nize yerel ağınızda sabit bir IP adresi vermeli ve modem/router’ınızdan gerekli portu (bu örneğimizde 80 numaralı port) bu sabit IP’ye yönlendirmeli, yani “port açmalı”sınız. Bu durumda modeminizin dış dünya ile haberleşmek için kullandığı IP adresine bağlantı yaptığınızda bağlantınız evinizdeki yerel ağda bağlı olan Raspberry Pi’nize yönlenecektir.
çok teşekkür ederim .eve gidince deneyeceğim . iyi günler iyi çalışmalar
hocam öncelikle bu güzel çalışma için ellerinize sağlık . benim bir sorum olacak . bitirme projesi olarak bizde buna benzer bir proje yapıyoruz ama biraz farklı . bu şekide robot üzerinde kamera olacak ve sisteme tanıtılan nesnenin hareketine göre robot hareket edecek yani görüntü işleme tekniğiyle . bu projedeki tanıtma işlemi işimi görürmü acaba?
Kameradan aldığınız görüntüyü işlemek tamamen yazılım ile ilgilidir. Bu projede kullanılan kamerayı kullanmanız mümkündür.
Öncelikle merhabalar bu projede telefondan hotspot u açıp hücresel veriyi açmasak çalışır mı.
Raspberry pi kamera modülü yerine gopro kullanabilirmiyiz
Merhabalar. Cep telefonunuzdan hotspot özelliğini açarak çalıştırabilirsiniz. Raspberry Pi kamera modülü yerine GoPro kullanmanız malesef mümkün değildir, Raspberry Pi’nin kamera bağlantı arayüzü yalnızca kendi kamera modüllerini desteklemektedir.
merhaba,
robotu yapmaya başladım fakat çok uğraşmama rağmen pan tilt sistemi ve Raspberry Pi Kamera Modülü’nü birbirine monte edemedim
Yardımcı olabilir misiniz?
Bizler montaj için pan-tilt sistemindeki küçük bir parçayı kestik ve parçaya tutturmak için çift taraflı bant kullandık.
Öncelikle merhabalar hocam. Biz Bu projeyi bitirme projesi olarak yapıyoruz ama bizim projede normal bir webcam kullanmamız gerekiyor. Bunun için ne yapmalıyız . Çalıştırır mı. Başka bir yöntem mi denemeliyiz. Şimdiden Teşekkur ederiz. İyi çalışmalar.
Kullanacağınız webcam’in çalışması, Linux sürücülerinin olup olmadığına bağlıdır. Bu yüzden kesin bir cevap vermemiz mümkün değildir.
Sizden ricam bana bu projenin algoritmasını verebilir misiniz. Bazi değişiklikler yapmamız gerekmektede proje üzerinde.Şimdiden teşekkurler iyi çalışmalar
Algoritmadan kastınız nedir? Projede kullanılacak tüm program kodlarını yazıda “Gerekli Kütüphaneler ve Dosyalar” linkinde verdik. Buradan erişmeniz mümkündür.
akış diyagramı şeklinde gerekli. kodlar üzerinden gitmem çok zor olacak onun için size yazdım şimdiden teşekkür ederim. iyi çalışmalar
berk kara kardeşim arabayı kontrol edebildiniz mi?
evet kontrol sağladık ama DC motor sayısını indirdik 2ye düşürdük biraz değişiklik yaptık. github’tan yararlandık halloldu
Merhaba hocam. Emeğinize sağlık güzel bir proje olmuş. DC motorların bağlantısı hakkında daha detaylı bilgi alabilirmiyim. iyi çalışmalar…
Bu projeyi l298 modülü ile yapmak mümkün mü ?
Merhaba proje iyi olmuş ellerinize sağlık bu proje camera module v1 ile olur mu ?
Merhabalar, güzel sözleriniz için teşekkür ederiz. Raspberry Pi ile kullanabileceğiniz tüm kamera modülleri ile projeyi gerçekleştirmeniz mümkündür.
Merhaba projeniz çok güzel yapımına başladım fakat yazılımsal olarak “sudo nano /etc/modules kısmını anlamadım , daha sonra kontrol için telefonuna indirdiğimiz dosyaları açamıyorum yardımcı olursanız sevinirim.
Merhabalar. /etc/modules dosyasının altına otomatik olarak sistem açılışında yüklenmesini istediğimiz modülleri ekliyoruz. “sudo nano /etc/modules” komutu ile dosyayı nano isimli editör ile açıp, gerekli satırları ekledikten sonra CTRL+O yapın, kaydetmek için “Y” tuşuna basın ve CTRL+X ile nano programından çıkın. Kontrol için telefona dosya indirmenize gerek yoktur, Pi’nizin IP adresini telefonunuzdaki tarayıcıya yazarak girebilirsiniz.
Dediklerinizi yaptım teşekkür ederim daha sonra tar xvf rpi-robot.tgz bu komutu yaptım fakat download konutu çıkmadı yardım ederseniz sevinirim …
Acaba ben camera modülü v1.3 ile yaptığım için mi bcm2835-v4l2 komutu işe yaramıyor ?
Düşük bir ihtimal, kameranın donanımı farklı dahi olsa işletim sistemi tarafında aynı modülleri kullanmaktadır.
peki ne yapmam gerekiyor illa cam 2.0 ı mı almam gerekiyor ?
Merhaba proje cok iyi.
PI nin IP adresini girmeme ragmen WebIOPi calistiramadim. MJPG-Streamer den kamera goruntusunu aliyorum. telefondan kontrol edemiyorum# yardimci olursaniz sevinirim. iyi gunler
Merhabalar, karşılaştığınız hatayı daha detaylı anlatabilirseniz yardımcı olmamız daha kolay olacaktır 🙂
enverbey hatayı çözebildiniz mi aynı hatayı bizde alıyoruz
Bu sorunla ben de karşılaştım çözebildiyseniz yardımcı olursanız sevinirim.
merhaba öncelikle elinize sağlık. bazı noktaları anlamadım shield konusunda;
1-shieldi taktığımızda, ana güç kablosunu da shieldın mavi orta bölmesine taktığımızda artık raspberrynin açılması için gerekli olan güç kablosuna gerek yok mu? yani normalde shield olmadığı zaman raspberryi fişe taktığımız usb ye gerek kalmıyor mu artık ?
2-shieldi oturtunca(bizde servo motor yok bu arada,çok basit kamerasız sadece tekeri döndüren basit bir uygulama düşünelim), motorları ve ana gücü de mavi klemenslere burdaki gibi takınca, artık python programda pwma-pwmb ye denk gelen 26 ve 12 nolu pinleri gout(26,1) ve gout(12,1) şeklinde high yapınca (gout metodunu örnek verdim ismi önemli değil) motorlara direk güç aktarılıyor mu ? yani kısacası sadece shieldi oturtsam+mavi klemensten motorları ve ana gücü bağlasam+python programda 26 ve 12 pinout ları high yapsam motor döner değil mi doğru mu anladım ?
Merhabalar. Sorularınıza sırayla cevap vermek gerekirse;
1) Evet, shield üzerinde 5V regülatör bulunduğu için ekstradan güç girişine adaptör bağlamanıza gerek yoktur, ana bataryadan Raspberry Pi kartı da beslenmektedir.
2) Evet, servo takmasanız dahi program içersinde robotun ana motorları için gerekli komutlar yer aldığından sorunsuzca kullanabilirsiniz.
İlginiz için teşekkür ederiz.
hızlı yanıtınız için teşekkür ederim.
bir sorum daha olacak, shieldi aldık fakat güç kablosu çıkmadı içinden. bu shild’a 1.5v luk kalem pillerden 5tane seri bağlayıp taksam(7.5v) sorunsuz çalışır mı yoksa amper farklı gelebilir mi ? teşekkürler.
Ayrıca direk 9v lik dikdörtgen pille açsam sorun olur mu ?
bu shield bir türlü düzgün olarak açamıyor raspberry’i. ekranın sol üst köşesinde voltaj işareti çıkıyor raspberrynin düşük voltaj işareti. tam iletilmiyor güç galiba.
9v olan dikdörtgen pille denedim, hatta ayarlanabilir adaptör taktım direk o da olmadı. ben raspberrynin güc kablosunu takıp onu normal şekilde
çalıştırsam, shiledı da 9v pille açıp ama anahtarını off konumunda yapsam ikisi ayrı ayrı çalışır mı?
Kullanmış olduğunuz 9V pilin Raspberry Pi’yi çalıştıracak kadar akım vermesi imkansızdır. Adaptör ile de sorun yaşamanızın sebebi yine akım yetersizliğindendir. Biz projede 2S yani 7.4V bir LiPo batarya kullandık. Siz de LiPo batarya veya 6 adet kalem pil alacak bir kalem pil yuvası kullanırsanız bu sorunu yaşamazsınız. Bahsettiğiniz şekilde iki farklı besleme kullanmanız tavsiye edilmemektedir.
Merhabalar, ışık izleyen araba için arabayi nasıl yavaslatabiliriz? tekere direnç takarak mı yoksa kodda pin.output voltaj ayarlayabiliyor muyuz ?
İlk yöntem daha düşük gerilime sahip bir batarya kullanmak olacaktır. Örnek olarak 9V (6xAA kalem pil) yerine 6V (4xAA kalem pil) gerilim ile motorları besleyebilirsiniz. Diğer seçeneğiniz ise, kullandığınız kontrolcüdeki PWM çıkışlarını motor sürücünüzün EN girişlerine bağlayarak buradan vereceğiniz PWM sinyali ile motorların hızını değiştirebilirsiniz.
Merhaba Kerem Bey,
Harika bir iş olmuş. Ellerinize sağlık.
Konunun çok acemisi olduğum için sorum (sorularım) saçma olursa affedin lütfen
1- Böyle bir proje için arduino’mu, raspberry’mi önerirsiniz ve neden? (arduino ile birşeyler yapabilmeye başlayabildiğim için soruyorum)
2- Eğer performans ve işlevsellik olarak arduino’dan da aynı verim alınabilirse, bu projenin arduino versiyonu varmı?
Şimdiden çoook teşekkürler 🙂
Bu projede Arduino yeterli gelmeyeceği için Raspberry Pi kullandık. Çünkü robot üzerindeki motor sürücü kartının çalıştırılması, WiFi bağlantısı, kameradan görüntü alınıp bu görüntünün bir web sayfası üzerinden yayınlanması gibi işleri aynı anda yapabilecek bir Arduino veya başka bir mikrokontrolcü mevcut değildir. Raspberry Pi bir bilgisayar olduğu için bu işlemlerin hepsini aynı anda yapabilmektedir. Arduino ile Raspberry Pi’nin farkını daha detaylı şekilde öğrenmek isterseniz buradaki yazıyı okuyabilirsiniz: Arduino ile Raspberry Pi’nin Farkı Nedir?
peki bu robota dinleme cihazı takılabilirmi ortam sesini duyabilirmiyiz
Merhaba öncelikle kolay gelsin ben bu projeyi l298n motor sürücü ile yapmayı düşünüyorum yardımcı olursanız mutlu olurum. İyi çalışmalar .
Merhaba, yazıda sağ ve sol motorların hangi GPIO pinlerine bağlı olduğu tablo olarak verilmiştir. Daha önceki benzer projelerimizde (örn. Engelden Kaçan Robot Yapımı ve Çizgi İzleyen Robot Yapımı) L298N sürücü kullanmıştık, bu projelerimizden faydalanarak bağlantılarınızı L298N’ye göre değiştirebilirsiniz.
Merhaba Kerem Bey,
Benim size bir sorum olucaktı, tüm adımları yaptıktan sonra en son “sudo ./start.sh” yazıyorum ardından şu şekilde hata alıyorum başlıyorum.
libv4l2: error setting pixformat: Device or resource busy
Unable to set format: 1448695129 res: 640×480
Init v4L2 failed !! exit fatal
i: init_VideoIn failed
bu konuda yardımcı olursanız çok sevinirim
İyi çalışmalar
aynı hatayı bende aldım nasıl çözebildiniz mi?
Merhaba robotu monte etmeye basladık fakat bataryanın cıkıslarını VCC ve GND girişlerine yerleştiremedik uçları cok büyük geliyor bir de pan tilt sistemindeki servoların kablolarını nasıl baglayacagız? Bitirme projem cok az zamanım kaldı yardım eder misiniz?
Prpjeyi satın alabilmemiz mümkün mü acaba
Projeyi satın ya da sipariş vermemiz mümkünmü
bcm2835-v4l2 modülünü yükleyemedim. Sadece komut ile mi yükleniyor daha detaylı açıklama şansınız var mı?
bcm2835-v4l2 modülü yükleyemedim? nasıl yüklendiğini daha açıklayıcı bir şekilde anlata bilir misiniz
merhaba bu projeye ses alış verişi eklememiz mümkünmüdür yani bebek odalarına konulan wifi kameraların sesleri duymamızı, istediğimizde kendi sesimizi robot aracılığı ile duyurmak bu projeye eklenebilirmi
Bu proje yüksek amper çeken RPi3 B+ modeli için de geçerli midir acaba?
lipo pil yerine 4lu kalem pil kullanılsa sorun olur mu ?
Merhaba cambot.py çalıştırırken ‘module’ object has no attribute ‘GPIO’ şeklinde bir hata alıyorum. ayrıca imaj dosyasını f16 gb karta yazarken kartı bölümlüyor ve imaj dosyası çalışmıyor. Yardımcı olabilir misiniz?
Teşekkürler.
Daha önce sorulmuş.Cevap göremedim.PI nin IP adresini girmeme ragmen WebIOPi calistiramadim. MJPG-Streamer den kamera goruntusunu aliyorum. telefondan yada yerel ağa bağlı başka makinadan bu siteye ulaşılamıyor diyor index.html i düzenlememe rağmen kontrol edemiyorum# yardimci olursaniz sevinirim. iyi gunler
yukardaki adımları uygulayıp çalıştırabilen var mı? Ben bağlanamıyorum kameraya. Yüklediğimiz raspbian işletim sistemi fark eder mi acaba. Bir de telefonun internetinden bağlanırken geçersiz arguman diye bir hata veriyor bunun nedeni ne olabilir?
Merhaba, seti komple satın alıp yapmaya başladım fakat motor shield nasıl kullanıldığına dair yeterli bir açıklama yapmamışsınız, raspberry’e güç vermek motorları çalıştırmaya yeterli değil sanırım, sette vermiş olduğunuz lipo pili nasıl bağlayacağız vs bunu detaylı fotoğraflandırabilir misiniz veya bağlantılar için bir video çekebilirseniz çok hoş olur, bitirme projemi tamamlayamıyorum motorları çalıştıramadığım için yardımcı olursanız çok sevinirim.
merhabalar,
rasperry pi den görüntütü alıp,dıs ortamdaki bigisayara nasıl aktarabilirim internet baglantısı olmadan mesala kablo gibi
bunu yapmak için ne gerkiyor ve ne kullanmamız gerekiyor (sualtı aracı projemiz için)
Teşşekürler…
Öncelikle teşekkürler proje çok güzel herşey çalıştı fakat pan/tilt sürekli oynuyur ufak hareketler yapmaya çalışıyor ne yapmak lazım bilen varmı
iyi günler
sudo webiopi -d -c ./config
komutuna kadar herşey doğru çalışıyor. fakat bu komutan sonra
…
…
SyntaxError: invalid syntax
hatası veriyor bir türlü aşamadım lütfen yardım edermisiniz
cözebildinmi o sorunu bendede aynısı var
ben de bu hata ile kalmış durumdayım,
yardım var mı?
sudo webiopi -d -c ./config
…
…
SyntaxError: invalid syntax
bu problemi aşan oldumu bende aynı yerde takılı kaldım
Projenin mekanik kısmını tamamladım. Ancak
1- Bu projede evdeki robota herhangi bir yerden nasıl bağlanabileceğim?
2- Bu şekilde bir yönetim yapabileceğim Cep tlfna yüklenebilecek paket prg. öneririmisiniz.
Aynı arayüzü webserver ile yönetme konusunda, web sayfasına bağlama durumu hakkında bilginiz var mı?
Detaylı bir anlatım yapabilirseniz sevinirim
pi@raspberrypi:~/RPi-Motor-Driver-Board-Demo-Code/magpi-cambot $ sudo webiopi -d -c ./config
Traceback (most recent call last):
File “/usr/lib/python3.7/runpy.py”, line 183, in _run_module_as_main
mod_name, mod_spec, code = _get_module_details(mod_name, _Error)
File “/usr/lib/python3.7/runpy.py”, line 142, in _get_module_details
return _get_module_details(pkg_main_name, error)
File “/usr/lib/python3.7/runpy.py”, line 109, in _get_module_details
__import__(pkg_name)
File “/usr/local/lib/python3.7/dist-packages/WebIOPi-0.7.1-py3.7-linux-armv7l.egg/webiopi/__init__.py”, line 20, in
from webiopi.utils.thread import runLoop
File “/usr/local/lib/python3.7/dist-packages/WebIOPi-0.7.1-py3.7-linux-armv7l.egg/webiopi/utils/thread.py”, line 36
def runLoop(func=None, async=False):
^
SyntaxError: invalid syntax
Her şey tamam, son çalıştırırken invalid syntax hatası veriyor. Yardımcı olabiliseniz çok makbule geçecek.
Python kütüphaneleriniz ile ilgili bir sorun var gibi görünüyor. Tekrar yüklemeyi deneyebilirsiniz.
Aynı sorun bendede oldu kerem bey nasıl ve nerden yükleyecez içinde hazır gelmişti 3b+da bide ısınıp kapanınca baştan yapmak gerekiyor direk hepsini çalıştıran bi kod varmı teşekkür ederim
Bende aynı hatayı alıyorum. Birçok kütüphaneleri yeniden yüklemeyi denedim.
Ahmet bey aynı sorun bendede oldu nasıl aştınız bu sorunu yardımcı olabilir misiniz
Merhaba bu sorun bende de var Nasıl çözdünüz söylerseniz çok memnun olurum
ahmet bey aynı sorunla karşılaştım.Lütfen yardımcı olur musunuz ? Çözümü nedir ?
merhabalar ben raspberry pi 4 kullanıyorum parçaların uyumluluğunda sorun olur mu ?
Merhabalar bu işlemi gerçekleştirirken bcm2835-v412 İndirdiğimiz gerekli kütüphaneler dosyasını ana klasörümüz olan /home/pi klasörüne taşıyıp dosyayı aşağıdaki komut ile açıyoruz. kodu taşımaya çalıştıgımda /home/pi dizindir hatası ile karşılaşıyorum.
merhabalar İndirdiğimiz gerekli kütüphaneler dosyasını ana klasörümüz olan /home/pi klasörüne taşıyıp dosyayı aşağıdaki komut ile açıyoruz bu kısımda problem yaşıyorum
Merhaba önce tebrikler çok güzel bir proje olmuş ama ben bir sorunum oldu her şeyi yaptım doğru ip adresini de değiştirdim ama weble bağlantı yapamadım Yani beni bağlantı yapamıyorum Neden olabilir acaba
merhaba pi@raspberrypi:~/RPi-Motor-Driver-Board-Demo-Code/magpi-cambot $ sudo webiopi -d -c ./config
Traceback (most recent call last):
File “/usr/lib/python3.7/runpy.py”, line 183, in _run_module_as_main
mod_name, mod_spec, code = _get_module_details(mod_name, _Error)
File “/usr/lib/python3.7/runpy.py”, line 142, in _get_module_details
return _get_module_details(pkg_main_name, error)
File “/usr/lib/python3.7/runpy.py”, line 109, in _get_module_details
__import__(pkg_name)
File “/usr/local/lib/python3.7/dist-packages/WebIOPi-0.7.1-py3.7-linux-armv7l.egg/webiopi/__init__.py”, line 20, in
from webiopi.utils.thread import runLoop
File “/usr/local/lib/python3.7/dist-packages/WebIOPi-0.7.1-py3.7-linux-armv7l.egg/webiopi/utils/thread.py”, line 36
def runLoop(func=None, async=False):
^
SyntaxError: invalid syntax
Bu hatayı hala çözemedim,tekrar kurulum yaptım ama işe yaramadı.Çözümü bulan var mı acaba?
Bir çözüm bulabildiniz mi?
Melih bey merhabalar aynı hatayı bende aldım çözüm bulabildiniz mi ?
pi@raspberrypi:~/RPi-Motor-Driver-Board-Demo-Code/magpi-cambot $ sudo webiopi -d -c ./config
Traceback (most recent call last):
File “/usr/lib/python3.7/runpy.py”, line 183, in _run_module_as_main
mod_name, mod_spec, code = _get_module_details(mod_name, _Error)
File “/usr/lib/python3.7/runpy.py”, line 142, in _get_module_details
return _get_module_details(pkg_main_name, error)
File “/usr/lib/python3.7/runpy.py”, line 109, in _get_module_details
__import__(pkg_name)
File “/usr/local/lib/python3.7/dist-packages/WebIOPi-0.7.1-py3.7-linux-armv7l.egg/webiopi/__init__.py”, line 20, in
from webiopi.utils.thread import runLoop
File “/usr/local/lib/python3.7/dist-packages/WebIOPi-0.7.1-py3.7-linux-armv7l.egg/webiopi/utils/thread.py”, line 36
def runLoop(func=None, async=False):
^
SyntaxError: invalid syntax
Bu hatanın neden hala bir çözümü yok?
merhabalar ben de benzer bir projeyle ilgileniyorum da sadece motor sürücüm eksik maliyet açısından alamayabilirim acaba uygun fiyatlı raspberry pi sürücüleri de aynı iş görür mü bir de ben levha tanıma falan yapıyorum bu bağlantılar onun için de geçerli olur mu?
Motorların akımlarını ve gerilimlerini kontrol ettikten sonra uygun bir motor sürücü seçimi yapabilirsiniz. İsterseniz shield isterseniz harici bir ek modül satın alabilirsiniz.
dosyalar silinmiş elinde olan varsa tekrar yükleyebilir mi acaba?
Buldun mu dosyayı kral
Hayırlı günler dilerim. Bu robotu 3 yıl önce yaptım ancak çalıştırmadım. Şuan drone ile ilgileniyorum. Gözlüğümüz mevcut ve ben bu gözlük ile robotu kullanmak istiyorum. Yardımcı olur musunuz?
Drone analog gözlük ile bu projeyi kullanmamız için destek atar mısınız
MERHALAR bu projede 2 adet 18650 pil kullansak sorun olur mu ?