Herkese merhabalar. Bu yazımızda sizlere Arduino programlama esnasında sıkça karşılaşılan hatalardan bahsedeceğim. Bunlardan bahsetmeden önce şu konuya bir açıklık getirelim. Her işte olduğu gibi bu işle uğraşırken de hata yapmak çok normal. Hata yapmak ve bunu kısa sürede çözememek motivasyonunuzun kaybolmasına neden olabilir fakat buna izin vermemeniz gerekir. Çünkü hata yaptıkça aslında tecrübe kazanmış, uğraştığımız şeyle ilgili daha çok bilgi sahibi oluruz. Karşılaştığımız hatalar, bazen onları nasıl çözebileceğimiz konusunda çalışmamız için bize fırsat verir ve bu sayede de kendimizi geliştirebiliriz. Hadi sıkça karşımıza çıkan bazı hatalardan bahsedeyim.
Arduino Hata Mesajları
Arduino’da karşılaştığımız hata mesajlarının birçok sebebi olabilir. Bu sorunlar genellikle Arduino ile bilgisayar arasındaki haberleşme sorunlarından, klon Arduino’ların sürücülerinin yüklü olmamasından, Arduino’nun veya bilgisayardaki USB portlarının arızalı olmasından kaynaklanabilir. Bunların haricinde derleme ve programlama öncesinde kullanıcının gerekli ayarları yapmaması da bazen hata mesajı gelmesine yol açmaktadır. Örneğin programlamak için bilgisayarınıza Arduino Nano bağladınız fakat Arduino IDE’de Arduino Uno programlayacağınızı belirttiniz. Bunun sonucunda bir hata mesajı almanız kaçınılmazdır.
Arduino IDE’de tüm kurulum ayarlarını doğru yaptınız, Arduino’nuz da bilgisayarınız ile haberleşmede sorun yaşamıyor fakat IDE’de belli bir satır belirtilerek hata mesajı alıyorsunuz… Bu, çözümü en kolay sorun. IDE’de gösterilen satırda bir yazım hatası yapmışsınız demektir. Yanlış yere parantez koyma, satır sonuna ‘;‘ koymama gibi hatalardan dolayı böyle bir geri bildirim alırsınız. Fakat yazım yanlışlarının çözülmesi veya kodlamada herhangi bir yazım yanlışı yapılmaması, programın tamamen sizin istediğiniz gibi çalışacağı anlamına gelmez. Bunun için kurduğunuz algoritmanın doğru olması gerekir.
Arduino IDE’de derleme ve programlama esnasında karşılaşılan yaygın bazı hataları ve çözümlerini yazının devamında bulabilirsiniz.
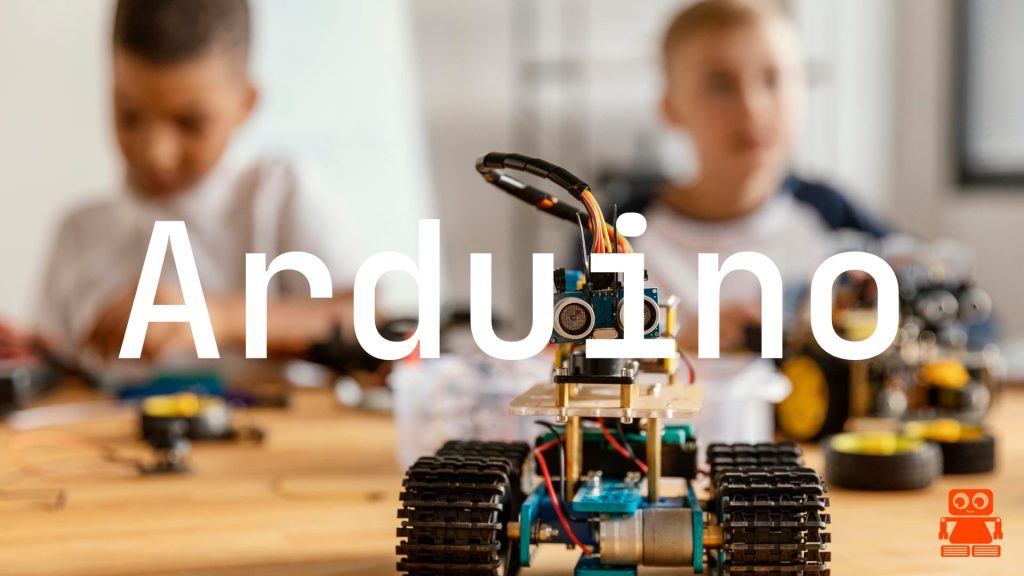
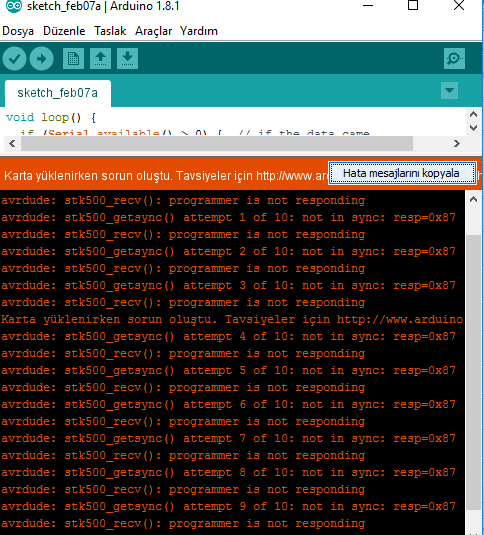
Arduino Karta Yüklenirken Sorun Oluştu – Taslak Yüklenirken Bir Hata Oluştu
avrdude: ser_open(): can't open device "\\.\COM1: Access is denied. avrdude stk500_recv() programmer is not responding avrdude stk500_getsync() attempt 1 of 10 not in sync resp=0x01 avrdude stk500_recv() programmer is not responding avrdude stk500_getsync() attempt 2 of 10 not in sync resp=0x01 ...
Bu sorunla karşılaştıysanız, muhtemel sebeplerini ve çözümlerini inceleyebilirsiniz. Böylece port sorununu, driver hatalarını aşmış, kartınızı kontrol etmiş olursunuz. Ayrıca bazen bu çeşit bir hatayı “taslak yüklenirken bir hata oluştu” şeklinde de alabilirsiniz, aynı çözüm yollarını denemenizi tavsiye ederim.
- Yanlış COM Portu veya yanlış Arduino kartı seçilmiş olabilir
Arduino’nuzu bilgisayarın bir portuna bağlayın. IDE’de Araçlar>Kart kısmından bağlı olan Arduino modelini seçin. Sonrasında Arduino Araçlar>Port kısmına gelip bağlı olan portu işaretleyin (Örnek: COM3). COM portu doğru belirlenmişse Arduino’yu bilgisayarınızın farklı bir portuna takarak tekrar deneyin.
- Gerekli sürücüler yüklenmemiş olabilir
Arduino kartları bazen sürücü yüklemesi sebebiyle hata verebilmektedir. Gerekli sürücüler bilgisayarınızda yüklü değil ise blog sayfamızda yer alan, Arduino Uno’yu örnek göstererek anlattığımız Arduino Sürücüleri Bilgisayara Nasıl Yüklenir? yazımızı ve eğer CH340 çipli klon Arduino kullanıyorsanız Klon Arduino Uno Sürücüleri Nasıl Yüklenir? yazılarımızı okuyarak bu sorunu çözebilirsiniz.
- Extra: Arduino’nun 0.pininde (RX) bir bağlantı var mı?
Bu her zaman için geçerli bir kural olmasa da bazen Arduino’nun 0. pininde bir bağlantı olduğunda bu sorunla karşılaşabiliyorsunuz. Programlama esnasında bu pinde herhangi bir bağlantı olmadığından emin olun.
Arduino Derleme Sırasında Bir Hata Oluştu (
Bu hata ile karşılaşıyorsanız Arduino IDE’de yazdığınız program derlenirken, yani henüz daha program karta atılmadan önce hazırlanırken bir sorun olmuş demektir. Genellikle bu sorunun birkaç sebebi vardır.
- Gerekli kütüphanelerin bulunmaması
Yazdığınız programda kullandığınız elektronik ekipmana göre farklı kütüphanelere ihtiyacınız olabilir. Her kütüphane Arduino IDE’de hazır olarak bulunmaz. Bu yüzden ihtiyacınız olan kütüphaneleri belirleyip indirmeniz gerekir. İndirdiğiniz kütüphaneyi bilgisayarınızda C:\Program Files\Arduino\Library dosyasına aktardığınızda başarıyla bu kütüphaneyi elde edebiliyorsunuz. Sonrasında ise yazdığınız programın ilk satırına #include <kutuphane.h> yazarak kütüphanenizi programınızda kullanabilirsiniz. Örnek:
Servo motorların kontrolü için Servo kütüphanesini indirdik ve kütüphaneyi az önce belirttiğim Library dosyasının içine aktardık. Yazacağımız Arduino programının örneği şu şekilde olmalıdır:
#include <Servo.h>
void setup()
{
...
}
void loop()
{
...
}
Arduino’nun referans olduğu bütün kütüphanelere buradan ulaşabilirsiniz.
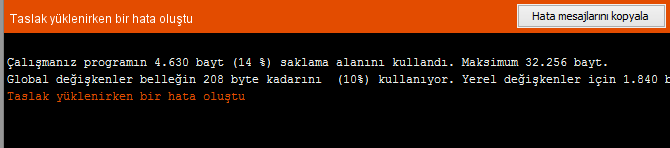
- “Syntax” hatası (Yazım yanlışı)
Belki de karşılaştığınız sorun çok daha basit bir şey olabilir. Örneğin syntax hatası, yani yanlış sözdizimi… Açılan her parantez, köşeli parantez ve süslü parantezin kapatılması, komut sonlarına ‘;‘ konması, büyük/küçük harf uyumu gibi temel kurallara uyulmadığı takdirde yazılan program derlenmez. Bu sebeple programı yazarken yazım yanlışı yapmamaya dikkat etmek gerekir. Böyle bir durumda Arduino IDE hangi satırda hata yaptığınızı karşınıza çıkartabiliyor, bir diğer yandan da aşağıda çıkan hata raporunda belirtiyor.
Yukarıdaki görselde örnek bir hata inceleyebilirsiniz. Döngünün son satırındaki delay(1000) komutunun sonuna ‘;‘ getirilmediği için komut algılanmamış, dolayısıyla döngü tamamlanmamıştır. Bu yüzden de döngünün sonundaki ‘}‘ bulunan satırda hata bildirilmektedir. Aslında sorun kodun sonuna ‘}‘ getirilmesi değildir, bu yüzden hata bildirimini doğru anlamaya çalışın. IDE’nin alt kısmındaki hata raporunda da “expected ‘;’ before ‘}’ token” yazıyor, yani ‘}‘ öncesinde ‘;‘ getirilmesi belirtiliyor.
Error compiling for board Arduino/Genuino Uno
Bu hatayı alıyorsanız yine kartta değil derleyici yazılımı olarak kullandığınız Arduino IDE’niz de bir sıkıntı olabilir aşağıdaki çözümleri sırayla deneyebilirsiniz.
- Doğru kartı seçtiğinizden emin olun
‘Tools’ menüsünün altında ‘Board’ seçeneğinden doğru kartı seçtiğinizden emin olun.
- Arduino IDE yazılımını tekrar kurun
Arduino kartlarını programladığımız IDE yazılımını silip tekrar kurmanız sistemi sıfırlamanıza ve hataya sebep olan herhangi bir sebebi silmenize yarayacaktır. Denetim masasından veya indirdiğinizi klasörden IDE’yi silip Arduino Dersleri #1: Arduino Nedir? Nasıl Kurulur ve Neler Yapılabilir? yazımızı okuyarak tekrar kurabilirsiniz.
Sketch is too big
Bu hata eğer kodunuz kart hafızasından daha büyükse meydana gelir. Bu hatayı engellemek için aşağıdaki adımları deneyebilirsiniz.
- Taslak boyutunu küçültme
Bu hata taslak boyutunuz çok büyük olduğu için meydana gelir. Taslak boyutunuzu küçültmek için şu adımları deneyebilirsiniz: “Gereksiz kullandığınız kod bloklarını silin”, ”Veri tiplerini seçebileceğiniz minimum değerlerde seçin ” vb.
- Arduino modelini değiştirmek
Az önce de dediğimiz gibi bu hata kod boyutunun Arduino hafızasından çok büyük olduğu için meydana gelir daha büyük hafızalı modeller seçmek bu hatayı çözecektir. Arduino modellerini incelemek isterseniz Arduino modelleri kategorimizi inceleyebilirsiniz.
Avrdude: verification error, first mismatch at byte 0x0000
Bu hata Arduino’nun önyükleyicisi ile ilgili bir problem olduğunda ortaya çıkan bir hata aşağıdaki çözümü yaptığınızda hiçbir problem olmayacaktır.
- Arduino’ya bootloader(önyükleyici) yazdırın
Yukarıda da bahsettiğim üzere bu hata bootloader yani önyükleyici ile ilgili bir problem oluştuğunda çıkıyor. Bu sebepten dolayı önyükleyici tekrar yazdırdığınızda sorun ortadan kalkacaktır.
Stray ‘\304’ in program
Böyle bir hata ile karşılaşırsanız kartınızda değil kodunuzda bir problem vardır yani kodunuz daha karta yüklenmeden hata çıkarmaktadır. Bu hatanın sebepleri ve çözümleri aşağıdaki gibidir.
- Bilinmeyen karakterleri değiştirin
Kodunuzda olması muhtemel bilinmeyen karakterler olabilir. İngilizce karakterler dışında harf kullanmanız hata sebebi olacaktır. Kodunuzda kullandığınız belirli harfleri değiştirerek bu hatayı çözebilirsiniz.
- Kodunuzda ki Türkçe karakterleri değiştirin
Bu hata ile karşılaştıysanız büyük ihtimalle kodunuzda Türkçe karakterler vardır(ğ,ü,ö,ş,ç,ı). Bu karakterleri sadece İngilizce harfler ile değiştirerek bu hatadan kurtulabilirsiniz.
Stray ‘\342’ in program
Bu hata kodunuzu internet üzerinden kopyaladığınızda oluşuyor. Kodda bazı karakterler farklı alındığı için sıkıntı çıkartabiliyor.
- Kodu yazmayı deneyin
Bulduğunuz kodu internetten kopyalamak yerine kendiniz yazmayı deneyebilirsiniz böylece hem hatadan kurtulursunuz hem de yazma hızınız artar.
- Kodu indirmeyi deneyin
Kod çok uzunsa veya farklı sebeplerden ötürü yazamıyorsanız kodu indirmeyi deneyebilirsiniz.
‘else’ without a previous ‘if’
Bu hatayı alıyorsanız kodunuzda birkaç eksik işaret var demektir. Yine bu hata kodunuz karta yüklenmeden önce aldığınız bir hatadır. Ayrıca bu hatayı Exit status 1 ile birlikte de alabilirsiniz ve çözümleri aşağıdaki gibidir:
- Kodunuzdaki süslü parantezleri kontrol edin
If ve Else ifadelerini yanlış kullanmış olabilirsiniz. Doğru kullanımı aşağıdaki gibidir.
void setup() {
}
void loop() {
if () {
}
else {
}
}
En sık karşılaşılan problemler – FAQ
Avrdude: ser_open(): can’t open device
- Basit olarak Arduino kartınızı başka bir usb girişine takıp ‘Tools’ listesinden ‘port’ menüsü içindeki portu değiştirirseniz hata çözülecektir.
‘motor’ was not declared in this scope
- Motor değişkeni kodda tanımlanmamış tanımlandıysa bile yanlış yerde tanımlanmıştır eğer değişkeni her yerde kullanmak isterseniz kodun en üst tarafında void setup() satırının üstünde yazmanız gerekmektedir.
Seri Port açılmıyor
- Tek yapmanız gereken ‘Tools’ listesinden ‘port’ menüsü içindeki portu değiştirmek.
Serial port not selected
- ‘Tools’ menüsünün altında ‘Port’ seçeneğinden Arduino kartınızın bağlı olduğu portu seçin veya CH340G için driver kurun. Sürücüyü kurmak için Arduino Dersleri #1: Arduino Nedir? Nasıl Kurulur ve Neler Yapılabilir?
No such file or directory
- Kodunuzda kullandığınız ‘.h’ uzantılı kütüphaneleriniz yüklenmemiş veya yanlış yüklenmiş olabilir. Tekrar indirmeyi deneyin veya kütüphanenizin kurlum dosyaları içindeki libraries klasörü içinde olduğunu kontrol edin.
Daha fazla hata olduğunda yorum olarak yazın, çözümüyle güncelleyelim.
En başta da söylediğim gibi hata yapmak en doğal unsurlardan biri hata yaparak öğreniriz. Ve artık bütün hatalarımızı çözebildik bu yazıyı elimizden geldiğince aktif ve güncel tutacağız. Siz de burada bulamadığınız hataları yorumlara yazabilirsiniz. Hepinize bol projeli günler.
En sevdiğiniz Arduino modelleri : Arduino modelleri
Arduino’ya başlamak için ideal olan başlangıç setimiz: Arduino Uno başlangıç seti
Arduino eğitim serimiz: Arduino Dersleri #1: Arduino Nedir? Nasıl Kurulur ve Neler Yapılabilir?







Merhabalar
Bende exit status 1
‘else’ without a previous ‘if’
diye bir hata çıkıyor
yardımcı olabilir misiniz?
if döngüsündeki else den sonra } işaretini koymamış olabilirsiniz.
if else } mi yazmamız gerekiyor
no no no hayır!
Merhaba Arkadaşlar herkese kolay gelsin benim sorunum http://www.instructables.com/id/Simple-PS3-Arduino-Project/ bu sitedeki projeyi yaptım çalıştırdım fakat ufak bir sorunum kaldı program kodu ile ilgili aracım ileri ve geri gitmiyor bunun sebebininde projede kullanılan orjinal motor sürücü kartı olduğunu düşünüyorum çünkü farklı bir kart kullanmış bende türkiyede en çok kullanılan motor sürücü kartı kırmızı renkli l298n çin malı motor sürücü kartını kullandım aracım sağa ve sola dönüyor fakat ileri ve geri gitmiyor program kodunda ne gibi bir değişiklik yapmam gerekiyor bana bu konuda yardımcı olabilirmisiniz.
kodda void ileri geri vb.varmı hani kodlarda void sağ sol vs.bulunuyorsa oda olması lazım void ileri geri yoksa onlarıda yaz
merhabalar ben bunlara yeni basladım bu koddaki yaptıgım hataları bilemiyorum yardımcı olurmusunuz
void setup() {
pinMode(trig,OUTPUT);
pinMode(echo,INPUT);
pinMode(led_1,OUTPUT);
pinMode(led_2,OUTPUT);
pinMode(motor_1,OUTPUT);
pinMode(motor_2,OUTPUT);
}
void loop() {
kelime();
int sayı = analogRead(yol);
if(10< sayı<13){
digitalWrite(led_1,HIGH);}
else
{ digitalWrite(led_1,LOW);}
kelime();
if(5<sayı<9){
digitalWrite(motor_1,126);}
else{
digitalWrite(motor_1,LOW);}
kelime();
if(1<sayı<8){
digitalWrite(motor_2,126)&&digitalWrite(led_2, HIGH);}
else{
digitalWrite(motor_2,LOW);}
}
if(10< sayı<13){
digitalWrite(led_1,HIGH);}
else
{ digitalWrite(led_1,LOW);}
kelime();
yerine
if(10< sayı){
if (sayı < 13){
digitalWrite(led_1,HIGH);}
}
else
{ digitalWrite(led_1,LOW);}
kelime();
Bu arada hatayı yazarsan daha iyi olur
merhaba benim arduinomda herhangi birşey bağlı olmadığı halde rx pin yanıp sönüyor ve yazılımda atamıyorum lütfen yardım edin
#define yok
void setup()
{
pinMode(6, OUTPUT); //Enable
pinMode(5, OUTPUT); //Step
pinMode(4, OUTPUT); //Direction
digitalWrite(6,LOW);
}
void loop()
{
digitalWrite(4,HIGH);
for(Index = 0; Index < 2000; Index++)
{
digitalWrite(5,HIGH);
delayMicroseconds(500);
digitalWrite(5,LOW);
delayMicroseconds(500);
}
delay(1000);
digitalWrite(4,LOW);
for(Index = 0; Index < 2000; Index++)
{
digitalWrite(5,HIGH);
delayMicroseconds(500);
digitalWrite(5,LOW);
delayMicroseconds(500);
}
delay(1000);
} burda ne hata var nolur yardımcı nolun
Index’in başına “int” koymamışsın. Daha önceden “int Index;” diye tanımladın mı?
Bir yerde int Index = [değer]; diye bir yer yok ki
kod yazamıyom harfe basınca yazmıyo
harfe basınca yazmıyor
bilgisayarı yeniden başlatmayı deneyin.
merhaba arduinoyu programlayıcı olarak kullandıktan sonra arduinoya kod atamıyorum. Bootloader ayarlarını değiştirdim kod atarken . arduınoyu tekrar nasıl programlayabilirim?
Arduino:1.8.7 (Windows 10), Kart:”Arduino/Genuino Uno”
exit status 1
Error compiling for board Arduino/Genuino Uno.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
BENDE BÖYLE SAÇMA SAPAN HATA ÇIKIYO LED BİLE YAKAMIYOM LÜTFEN ACİL Bİ YARDIM EDER MİSİNİZ ?
herhalde Arduino kartında bir sorun var
int ledDelay=10000;
int kırmızıLed=10;
int sarıLed=9;
int yeşilLed=8;
void setup() {
pinMode(kırmızıLed,OUTPUT);
pinMode(sarıLed,OUTPUT);
pinMode(yeşilLed,OUTPUT);
}
void loop() {
digitalWrite(10,HIGH);
delay (ledDelay);
digitalWrite(sarıLed,HIGH);
delay(2000);
digitalWrite(yeşilLed,HIGH);
digitalWrite(kırmızıLed,LOW);
digitalWrite(sarıLed,LOW);
delay(ledDelay);
digitalWrite(sarıLed,HIGH);
digitalWrite(YeşilLed,LOW);
delay(2000);
digitalWrite (sarıLed,LOW) ;
}
Arduino:1.8.6 (Windows 7), Kart:”Arduino/Genuino Uno”
sketch_dec02a:2:1: error: stray ‘\304’ in program
int kırmızıLed=10;
^
sketch_dec02a:2:1: error: stray ‘\261’ in program
sketch_dec02a:2:1: error: stray ‘\304’ in program
sketch_dec02a:2:1: error: stray ‘\261’ in program
sketch_dec02a:2:1: error: stray ‘\304’ in program
sketch_dec02a:2:1: error: stray ‘\261’ in program
sketch_dec02a:3:1: error: stray ‘\304’ in program
int sarıLed=9;
^
sketch_dec02a:3:1: error: stray ‘\261’ in program
sketch_dec02a:4:1: error: stray ‘\305’ in program
int yeÅŸilLed=8;
^
sketch_dec02a:4:1: error: stray ‘\237’ in program
sketch_dec02a:7:1: error: stray ‘\304’ in program
pinMode(kırmızıLed,OUTPUT);
^
sketch_dec02a:7:1: error: stray ‘\261’ in program
sketch_dec02a:7:1: error: stray ‘\304’ in program
sketch_dec02a:7:1: error: stray ‘\261’ in program
sketch_dec02a:7:1: error: stray ‘\304’ in program
sketch_dec02a:7:1: error: stray ‘\261’ in program
sketch_dec02a:8:1: error: stray ‘\304’ in program
pinMode(sarıLed,OUTPUT);
^
sketch_dec02a:8:1: error: stray ‘\261’ in program
sketch_dec02a:9:1: error: stray ‘\305’ in program
pinMode(yeÅŸilLed,OUTPUT);
^
sketch_dec02a:9:1: error: stray ‘\237’ in program
sketch_dec02a:13:1: error: stray ‘\304’ in program
digitalWrite(kırmızıLed,HIGH);
^
sketch_dec02a:13:1: error: stray ‘\261’ in program
sketch_dec02a:13:1: error: stray ‘\304’ in program
sketch_dec02a:13:1: error: stray ‘\261’ in program
sketch_dec02a:13:1: error: stray ‘\304’ in program
sketch_dec02a:13:1: error: stray ‘\261’ in program
sketch_dec02a:15:1: error: stray ‘\304’ in program
digitalWrite(sarıLed,HIGH);
^
sketch_dec02a:15:1: error: stray ‘\261’ in program
sketch_dec02a:17:1: error: stray ‘\305’ in program
digitalWrite(yeÅŸilLed,HIGH);
^
sketch_dec02a:17:1: error: stray ‘\237’ in program
sketch_dec02a:18:1: error: stray ‘\304’ in program
digitalWrite(kırmızıLed,LOW);
^
sketch_dec02a:18:1: error: stray ‘\261’ in program
sketch_dec02a:18:1: error: stray ‘\304’ in program
sketch_dec02a:18:1: error: stray ‘\261’ in program
sketch_dec02a:18:1: error: stray ‘\304’ in program
sketch_dec02a:18:1: error: stray ‘\261’ in program
sketch_dec02a:19:1: error: stray ‘\304’ in program
digitalWrite(sarıLed,LOW);
^
sketch_dec02a:19:1: error: stray ‘\261’ in program
sketch_dec02a:21:1: error: stray ‘\304’ in program
digitalWrite(sarıLed,HIGH);
^
sketch_dec02a:21:1: error: stray ‘\261’ in program
sketch_dec02a:22:1: error: stray ‘\305’ in program
digitalWrite(yeÅŸilLed,LOW);
^
sketch_dec02a:22:1: error: stray ‘\237’ in program
sketch_dec02a:24:1: error: stray ‘\304’ in program
digitalWrite(sarıled,LOW);
^
sketch_dec02a:24:1: error: stray ‘\261’ in program
sketch_dec02a:2:8: error: expected initializer before ‘rm’
int kırmızıLed=10;
^
sketch_dec02a:3:10: error: expected initializer before ‘Led’
int sarıLed=9;
^
sketch_dec02a:4:9: error: expected initializer before ‘ilLed’
int yeÅŸilLed=8;
^
C:\Users\user\Desktop\Arduino\sketch_dec01a\sketch_dec02a\sketch_dec02a.ino: In function ‘void setup()’:
sketch_dec02a:7:9: error: ‘k’ was not declared in this scope
pinMode(kırmızıLed,OUTPUT);
^
sketch_dec02a:8:9: error: ‘sar’ was not declared in this scope
pinMode(sarıLed,OUTPUT);
^
sketch_dec02a:9:9: error: ‘ye’ was not declared in this scope
pinMode(yeÅŸilLed,OUTPUT);
^
C:\Users\user\Desktop\Arduino\sketch_dec01a\sketch_dec02a\sketch_dec02a.ino: In function ‘void loop()’:
sketch_dec02a:13:14: error: ‘k’ was not declared in this scope
digitalWrite(kırmızıLed,HIGH);
^
sketch_dec02a:15:14: error: ‘sar’ was not declared in this scope
digitalWrite(sarıLed,HIGH);
^
sketch_dec02a:17:14: error: ‘ye’ was not declared in this scope
digitalWrite(yeÅŸilLed,HIGH);
^
sketch_dec02a:18:17: error: expected ‘)’ before ‘rm’
digitalWrite(kırmızıLed,LOW);
^
sketch_dec02a:19:19: error: expected ‘)’ before ‘Led’
digitalWrite(sarıLed,LOW);
^
sketch_dec02a:21:19: error: expected ‘)’ before ‘Led’
digitalWrite(sarıLed,HIGH);
^
sketch_dec02a:22:18: error: expected ‘)’ before ‘ilLed’
digitalWrite(yeÅŸilLed,LOW);
^
sketch_dec02a:24:19: error: expected ‘)’ before ‘led’
digitalWrite(sarıled,LOW);
^
exit status 1
stray ‘\304’ in program
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
BU HATALARI ALIYORUM ANLIYAN EL ATSIN YAA ACİLL….
Türkçe karakter kullanmamanız gerekmektedir efendim 😀
port seç
Merhaba benim bir sorunum var, arduino ide’i bilgisayara yükledim Arduino Uno’u da tanıttım kod yazmak istiyorum fakat sketch sayfası hiçbir değişiklik yapmama izin vermiyor sorun ne olabilir nasıl çözerim?
bilgisayarı yeniden başlatmayı deneyin.
merhaba yardımcı olursanız sevinirim arduino uno boş cod bile atılmıyor aynı zaman L ışığı yanıyor hiçbir pin bağlı değil usb yide değiştim ama olmuyor.
ON yandığında L de yanıyor. Bu “işlemci çalışıyor” demektir. Siz kodunuzu yazmaya başlayın.
‘else’ without a previous ‘if’
sorunu nasıl çözülür
else satırında sorun var
Efendim siz else dedikten sonra bir işlemi kontrol etmiş olabilir misiniz
Yani diyelim ki 13 nolu pinin değeri 1 ise veya değilse
if (digitalRead(13) == 1) {
digitalWrite(12, HIGH);
delay(400);
digitalWrite(12, LOW);
delay(400);
}
else (digitalRead(13) == 0) {
}
else komutundaki digitalRead(13) == 0 komutu olmayacak yani;
else {
digitalWrite(11, HIGH);
delay(400);
digitalWrite(11, LOW);
delay(400);
}
Yukarıdaki gibi yazmamış olabilir misiniz yazmadıysanız öyle olması gerekiyor
“else”den önce “if” komutunu yaptınız mı?
“else if” diye deneyin veya
else de hata alıyorum yardımcı olabilirmisiniz?
int led1=2;
int led2=3;
int led3=4;
int led4=5;
int led5=6;
int led6=7;
int led7=8;
int buton1=9;
int buton2=10;
void setup ()
{
pinMode(buton1,INPUT);
pinMode(buton2,INPUT);
pinMode(led1,OUTPUT);
pinMode(led2,OUTPUT);
pinMode(led3,OUTPUT);
pinMode(led4,OUTPUT);
pinMode(led5,OUTPUT);
pinMode(led6,OUTPUT);
pinMode(led7,OUTPUT);
}
void loop ()
{
if(digitalRead(buton1)==HIGH);
digitalWrite(led1,HIGH);
delay(400);
digitalWrite(led2,HIGH);
delay(400);
digitalWrite(led3,HIGH);
delay(400);
digitalWrite(led4,HIGH);
delay(400);
digitalWrite(led5,HIGH);
delay(400);
digitalWrite(led6,HIGH);
delay(400);
digitalWrite(led7,HIGH);
delay(400);
digitalWrite(led7,LOW);
delay(400);
digitalWrite(led6,LOW);
delay(400);
digitalWrite(led5,LOW);
delay(400);
digitalWrite(led4,LOW);
delay(400);
digitalWrite(led3,LOW);
delay(400);
digitalWrite(led2,LOW);
delay(400);
digitalWrite(led1,LOW);
delay(400);
if(digitalRead(buton2)==HIGH);
digitalWrite(led4,HIGH);
delay(400);
digitalWrite(led3,HIGH);
digitalWrite(led5,HIGH);
delay(400);
digitalWrite(led2,HIGH);
digitalWrite(led6,HIGH);
delay(400);
digitalWrite(led1,HIGH);
digitalWrite(led7,HIGH);
delay(400);
digitalWrite(led1,LOW);
digitalWrite(led7,LOW);
delay(400);
digitalWrite(led2,LOW);
digitalWrite(led6,LOW);
delay(400);
digitalWrite(led3,LOW);
digitalWrite(led5,LOW);
delay(400);
digitalWrite(led4,LOW);
delay(400);
}
else
{
digitalWrite(led1,LOW);
digitalWrite(led2,LOW);
digitalWrite(led3,LOW);
digitalWrite(led4,LOW);
digitalWrite(led5,LOW);
digitalWrite(led6,LOW);
digitalWrite(led7,LOW);
}
}
Merhabalar efendim, ben Arduino Nano kullanıyorum ve error compiling for board Arduino Nano hatasını alıyorum
Çözebilir misiniz
Arduino Nano ve Com’u seçtimiz mi?
int CLK_PIN= 6;
int DAT_PIN= 7;
int RST_PIN= 8;
virtuabotixRTC myRTC(CLK_PIN, DAT_PIN, RST_PIN);
void setup() {
Serial.begin(9600);
myRTC.setDS1302Time(10, 34, 14, 3, 26, 12, 2018);
}
void loop() {
myRTC.updateTime();
Serial.print(“Tarih/Saat:”);
Serial.print(myRTC.dayofmonth);
Serial.print(“/”);
Serial.print(myRTC.month);
Serial.print(“/”);
Serial.print(myRTC.year);
Serial.print(“/”);
Serial.print(” “);
Serial.print(myRTC.hours);
Serial.print(“:”);
Serial.print(myRTC.minutes);
Serial.print(“:”);
Serial.println(myRTC.seconds);
delay(1000);
}
kodlar ve bağlantılarım doğru ama serial ekranında saniye hiç artmıyor sürekli 10 gösteriyor.
nedenini çözemedim.
Tarih/Saat:26/12/2018/ 14:34:10
Tarih/Saat:26/12/2018/ 14:34:10
Tarih/Saat:26/12/2018/ 14:34:10
Tarih/Saat:26/12/2018/ 14:34:10
Tarih/Saat:26/12/2018/ 14:34:10
Arduino:1.8.8 (Windows 7), Kart:”Arduino/Genuino Uno”
sketch_jan11a:8:3: error: stray ‘\304’ in program
digitalWrite(8,HIGH);
^
sketch_jan11a:8:3: error: stray ‘\260’ in program
C:\Users\Toshiba\Desktop\sketch_jan11a\sketch_jan11a.ino: In function ‘void setup()’:
sketch_jan11a:2:3: error: ‘pin’ was not declared in this scope
pin mode (8,OUTPUT);
exit status 1
stray ‘\304’ in program
LED yakamıyorum hata veriyor sorunu nasıl çözebilirim?
8 in hangi pin olduğunu belirttin mi
Yeni bilgisayarıma arduino uno indirdim. Kodları yazdım. Çalıştı. Bilgisayarı kapatıp açınca hiçbir kodum çalışmadı. Ekranda ‘Uygulama başlatılamıyor. Sorunu çözmek için uygulamayı yeniden yüklemeyi deneyin’ çıktı. Hepsini sildim, bilgisayardan kaldırdım. Yeniden yükledim. Yine aynı. İlk yazdığımda kodları çalıştırıyor. Bilgisayar kapanıp açıldığında gidiyor. Ne yapmam lazım?
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino: In function ‘void drawHomeScreen()’:
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:225:50: warning: ISO C++ forbids converting a string constant to ‘char*’ [-Wwrite-strings]
myGLCD.print(“Arduino TFT Tutorial”, CENTER, 10); // Prints the string on the screen
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:230:54: warning: ISO C++ forbids converting a string constant to ‘char*’ [-Wwrite-strings]
myGLCD.print(“by HowToMechatronics.com”, CENTER, 41); // Prints the string
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:232:44: warning: ISO C++ forbids converting a string constant to ‘char*’ [-Wwrite-strings]
myGLCD.print(“Select Example”, CENTER, 64);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:241:46: warning: ISO C++ forbids converting a string constant to ‘char*’ [-Wwrite-strings]
myGLCD.print(“DISTANCE SENSOR”, CENTER, 102); // Prints the string
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:250:46: warning: ISO C++ forbids converting a string constant to ‘char*’ [-Wwrite-strings]
myGLCD.print(“RGB LED CONTROL”, CENTER, 152);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:259:44: warning: ISO C++ forbids converting a string constant to ‘char*’ [-Wwrite-strings]
myGLCD.print(“BIRDUINO GAME”, CENTER, 202);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino: In function ‘void drawDistanceSensor()’:
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:279:28: warning: ISO C++ forbids converting a string constant to ‘char*’ [-Wwrite-strings]
myGLCD.print(“<-", 18, 15);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:282:43: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("Back to Main Menu", 70, 18);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:284:47: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("Ultrasonic Sensor", CENTER, 50);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:285:37: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("HC-SR04", CENTER, 76);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:291:38: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("Select Unit", 10, 114);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:293:37: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("Distance:", 130, 120);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:300:29: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("cm", 33, 140);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:307:31: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("inch", 17, 180);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:310:68: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("Source code at: HowToMechatronics.com", CENTER, 220);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino: In function 'void getDistance()':
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:334:34: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("cm ", 235, 178);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:344:34: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("inch", 235, 178);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino: In function 'void drawLedControl()':
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:356:28: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("<-", 18, 15);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:359:43: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("Back to Main Menu", 70, 18);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:361:45: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("RGB LED Control", CENTER, 50);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:362:36: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("LED Color:", 10, 95);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:363:28: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("R", 10, 135);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:364:28: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("G", 10, 175);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:365:28: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("B", 10, 215);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino: In function 'void drawGround()':
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:457:30: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("Score:",5,220);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:459:49: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("HowToMechatronics.com", 140, 220);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino: In function 'void gameOver()':
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:518:39: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("GAME OVER", CENTER, 40);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:519:33: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("Score:", 100, 80);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:521:44: warning: ISO C++ forbids converting a string constant to 'char*' [-Wwrite-strings]
myGLCD.print("Restarting…", CENTER, 120);
^
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino: In function 'drawHomeScreen':
C:\Users\hp\Documents\Arduino\sketch_jan21a\sketch_jan21a.ino:260:1: internal compiler error: Segmentation fault
}
^
Please submit a full bug report,
with preprocessed source if appropriate.
See for instructions.
lto-wrapper.exe: fatal error: C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.19.0_x86__mdqgnx93n4wtt\hardware\tools\avr/bin/avr-gcc returned 1 exit status
compilation terminated.
c:/program files/windowsapps/arduinollc.arduinoide_1.8.19.0_x86__mdqgnx93n4wtt/hardware/tools/avr/bin/../lib/gcc/avr/5.4.0/../../../../avr/bin/ld.exe: error: lto-wrapper failed
collect2.exe: error: ld returned 1 exit status
exit status 1
Error compiling for board Arduino/Genuino Mega or Mega 2560.
böyle bir hata verdi sorun kısaca arduino 2560 uyumlu olmadığını söylüyor
Arduino Mega 2560 R3 (Klon) aldım xp wın de sücü hata veriyor
Joyistik ile 6 servo motorun kontrolunü nasil yapabilirim??
arduino pro mini kullanıyorum ve taslak çok büyük hatası alıyorum yardım edebilecek olan instadan dönüş yapsın lütfen @arda39.jpg
#include <Servo.h>
burayı kırmızı işaretleyip hata veriyor lütfen yardımcı olur musunuz kodun tamamı bu;
// Silecekli kask
//
// Made by Fatih Yilmaz
// License: CC-BY-SA 3.0
#include <Servo.h>
//14.04.17
//FMY
Servo myservo;
int pos = 0; //burayı ellemeyiniz
const int sensorMin = 0; // sensor minimum
const int sensorMax = 1024; // sensor maximum
void setup() {
Serial.begin(9600);
myservo.attach(9); //motorun bağalanacağı pin() burada 9. pine bağalanacak
//isteğe göre değiştirirsiniz
}
void loop() {
buraya:
int sensorOkuma = analogRead(A0); //kart bağlantı pini
int deger= map(sensorOkuma, sensorMin, sensorMax, 0, 3);
switch (deger) {
//———————————————————————————————————-
case 0:
Serial.println("Saganak Yagmur");
for(pos = 0; pos < 45; pos+= 1) //45 derecedir 1. yön için değiştirilebilir 0-180 arası olmalıdır
//aşağıdaki 2. for döngüsündeki açı ile aynı çapraz olarak aynı olamalıdır
{
myservo.write(pos);
delay(15); /*buradaki değer aşağıdaki ile aynı olmak zorundadır
değeri ne akdar düşrürüseniz motor okadar hızlanır ancak belli bir noktadan sonra
hızlanamayacaktır*/
}
//2.(geri) dönüş yönü for döngüsü
for(pos = 45; pos>=1; pos-=1) /*motorun dönüşü için olan döngüdür.*/
{
myservo.write(pos); //burayı ellemeyniniz
delay(15); //yukaraki delay değeriyle aynı olmalıdır. pwm (clock pals) gönderme aralıdıgıdır milisaniye cinsinden
}
break;
//———————————————————————————————————-
case 1:
Serial.println("Yagmur Yagiyor");
for(pos = 0; pos < 45; pos+= 1) //45 derecedir 1. yön için değiştirilebilir 0-180 arası olmalıdır
//aşağıdaki 2. for döngüsündeki açı ile aynı çapraz olarak aynı olamalıdır
{
myservo.write(pos);
delay(15); /*buradaki değer aşağıdaki ile aynı olmak zorundadır
değeri ne akdar düşrürüseniz motor okadar hızlanır ancak belli bir noktadan sonra
hızlanamayacaktır*/
}
//2.(geri) dönüş yönü for döngüsü
for(pos = 45; pos>=1; pos-=1) /*motorun dönüşü için olan döngüdür.*/
{
myservo.write(pos); //burayı ellemeyniniz
delay(15); //yukaraki delay değeriyle aynı olmalıdır. pwm (clock pals) gönderme aralıdıgıdır milisaniye cinsinden
}
break;
// //———————————————————————————————————-
case 2:
Serial.println("Kuru");
goto buraya;
break;
}
delay(1000);
}
#include <Servo.h>
burayı kırmızı işaretleyip hata veriyor lütfen yardımcı olur musunuz ??
// Silecekli kask
//
// Made by Fatih Yilmaz
// License: CC-BY-SA 3.0
#include <Servo.h>
//14.04.17
//FMY
Servo myservo;
int pos = 0; //burayı ellemeyiniz
const int sensorMin = 0; // sensor minimum
const int sensorMax = 1024; // sensor maximum
void setup() {
Serial.begin(9600);
myservo.attach(9); //motorun bağalanacağı pin() burada 9. pine bağalanacak
//isteğe göre değiştirirsiniz
}
void loop() {
buraya:
int sensorOkuma = analogRead(A0); //kart bağlantı pini
int deger= map(sensorOkuma, sensorMin, sensorMax, 0, 3);
switch (deger) {
//———————————————————————————————————-
case 0:
Serial.println("Saganak Yagmur");
for(pos = 0; pos < 45; pos+= 1) //45 derecedir 1. yön için değiştirilebilir 0-180 arası olmalıdır
//aşağıdaki 2. for döngüsündeki açı ile aynı çapraz olarak aynı olamalıdır
{
myservo.write(pos);
delay(15); /*buradaki değer aşağıdaki ile aynı olmak zorundadır
değeri ne akdar düşrürüseniz motor okadar hızlanır ancak belli bir noktadan sonra
hızlanamayacaktır*/
}
//2.(geri) dönüş yönü for döngüsü
for(pos = 45; pos>=1; pos-=1) /*motorun dönüşü için olan döngüdür.*/
{
myservo.write(pos); //burayı ellemeyniniz
delay(15); //yukaraki delay değeriyle aynı olmalıdır. pwm (clock pals) gönderme aralıdıgıdır milisaniye cinsinden
}
break;
//———————————————————————————————————-
case 1:
Serial.println("Yagmur Yagiyor");
for(pos = 0; pos < 45; pos+= 1) //45 derecedir 1. yön için değiştirilebilir 0-180 arası olmalıdır
//aşağıdaki 2. for döngüsündeki açı ile aynı çapraz olarak aynı olamalıdır
{
myservo.write(pos);
delay(15); /*buradaki değer aşağıdaki ile aynı olmak zorundadır
değeri ne akdar düşrürüseniz motor okadar hızlanır ancak belli bir noktadan sonra
hızlanamayacaktır*/
}
//2.(geri) dönüş yönü for döngüsü
for(pos = 45; pos>=1; pos-=1) /*motorun dönüşü için olan döngüdür.*/
{
myservo.write(pos); //burayı ellemeyniniz
delay(15); //yukaraki delay değeriyle aynı olmalıdır. pwm (clock pals) gönderme aralıdıgıdır milisaniye cinsinden
}
break;
// //———————————————————————————————————-
case 2:
Serial.println("Kuru");
goto buraya;
break;
}
delay(1000);
}
Merhabalar Hocam ben 20 khz ıle 40 khz arasında bır frekans yaymak ıstıyorum. Fakat kodumu yazdım perıyodu degıstıremıyorum. perıyot oldugu zamanda kare dalga uretmıyor. ben bunu proteus uzerınde denedım. fakat perıyotdu potasyometre ıle degıstırdıgım zaman bazen periyot degısıyor bazen bır suresı. Rica etsem koda bakabılırmsıınız ?
int birsuresi,sifirsuresi;
int okunan=0;
int a,b;
#define potpin A0
void setup() {
Serial.begin(9600);
randomSeed(analogRead(0));
}
void loop() {
okunan = analogRead(potpin);
Serial.println(okunan);
//okunan=(okunan/41)+25; //1024/41=25 +25 = 50 —– 0/41=0 +25=25 aralıgı sağlandı. 20khz ile 40 khz aralıgı saglanması lazım
//birsuresi = random(okunan);
//sifirsuresi = (okunan-birsuresi);
birsuresi=okunan/2;
sifirsuresi=okunan/2;
analogWrite(9,255);
tone(buzzerPin,1024);
delayMicroseconds(birsuresi);
analogWrite(9,0);
noTone(buzzerPin);
delayMicroseconds(sifirsuresi);
}
hata=
Çalışmanız programın 972 bayt (3 %) saklama alanını kullandı. Maksimum 32256 bayt.
Global değişkenler belleğin 9 byte kadarını (0%) kullanıyor. Yerel değişkenler için 2039 byte yer kalıyor. En fazla 2048 byte kullanılabilir.
Serial port not selected.
C:\Windows\system32\config\systemprofile\Documents\Arduino\libraries\sketch_mar16a içerisinde geçersiz kütüphane bulundu: no headers files (.h) found in C:\Windows\system32\config\systemprofile\Documents\Arduino\libraries\sketch_mar16a
C:\Windows\system32\config\systemprofile\Documents\Arduino\libraries\sketch_mar16a içerisinde geçersiz kütüphane bulundu: no headers files (.h) found in C:\Windows\system32\config\systemprofile\Documents\Arduino\libraries\sketch_mar16a
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
lütfen yardımcı olurmusunuz.bu arada port hatası ve başka hatalar veriyor. araçlaradan port seçmek istediğimde port renksiz yazı şeklinde gözüküyor ve port seçilmiyor. yardımcı olursanız sevinirim…
kabloyu başka bir usb porta tak olmazsa arduino’yu bilgisayara bağladığın kablo bozuk olabilir
#define yesil_led_pin 11
#define kirmizi_led_pin 10
#define motor_pin 9
#define nem_sensoru A0
#define calisma_siniri 600
int nem_degeri = 0;
void setup()
{
pinMode(yesil_led_pin , OUTPUT);
pinMode(kirmizi_led_pin , OUTPUT);
pinMode(motor_pin , OUTPUT);
Serial.begin(9600);
}
void loop()
{
nem_degeri = analogRead(nem_sensoru);
Serial.println(nem_degeri);
if (nem_degeri > calisma_siniri)
{
digitalWrite(motor_pin, HIGH);
digitalWrite(kirmizi_led_pin, HIGH);
digitalWrite(yesil_led_pin, LOW);
delay(3000);
digitalWrite(motor_pin, LOW);
delay(5000);
}
else
{
digitalWrite(yesil_led_pin, HIGH);
digitalWrite(motor_pin, LOW);
digitalWrite(kirmizi_led_pin, LOW);
}
}
çalışmanız programın 2384 bayt (7%) saklama alanını kullandı. Maksimum 32256 baty.
global değişkenler belleğin 190 byte kadarını (9%)kullanılıyor. yerel değişkenler için 1858 byte yer kullanılıyor . en fazla 2048 byte kullanılabilir
abi ne yapmalıyım bana yardım eder misiniz
sorun yok 😀
#include //SoftwareSerial kütüphanimizi ekliyoruz.
#include //DHT11 sensör kütüphanemizi ekliyoruz.
String agAdi = “Robotistan”; //Ağımızın adını buraya yazıyoruz.
String agSifresi = “fortinet”; //Ağımızın şifresini buraya yazıyoruz.
int rxPin = 10; //ESP8266 RX pini
int txPin = 11; //ESP8266 TX pini
int dht11Pin = 2;
String ip = “184.106.153.149”; //Thingspeak ip adresi
float sicaklik, nem;
dht11 DHT11;
SoftwareSerial esp(rxPin, txPin); //Seri haberleşme pin ayarlarını yapıyoruz.
void setup() {
Serial.begin(9600); //Seri port ile haberleşmemizi başlatıyoruz.
Serial.println(“Started”);
esp.begin(115200); //ESP8266 ile seri haberleşmeyi başlatıyoruz.
esp.println(“AT”); //AT komutu ile modül kontrolünü yapıyoruz.
Serial.println(“AT Yollandı”);
while(!esp.find(“OK”)){ //Modül hazır olana kadar bekliyoruz.
esp.println(“AT”);
Serial.println(“ESP8266 Bulunamadı.”);
}
Serial.println(“OK Komutu Alındı”);
esp.println(“AT+CWMODE=1”); //ESP8266 modülünü client olarak ayarlıyoruz.
while(!esp.find(“OK”)){ //Ayar yapılana kadar bekliyoruz.
esp.println(“AT+CWMODE=1”);
Serial.println(“Ayar Yapılıyor….”);
}
Serial.println(“Client olarak ayarlandı”);
Serial.println(“Aga Baglaniliyor…”);
esp.println(“AT+CWJAP=\””+agAdi+”\”,\””+agSifresi+”\””); //Ağımıza bağlanıyoruz.
while(!esp.find(“OK”)); //Ağa bağlanana kadar bekliyoruz.
Serial.println(“Aga Baglandi.”);
delay(1000);
}
void loop() {
esp.println(“AT+CIPSTART=\”TCP\”,\””+ip+”\”,80″); //Thingspeak’e bağlanıyoruz.
if(esp.find(“Error”)){ //Bağlantı hatası kontrolü yapıyoruz.
Serial.println(“AT+CIPSTART Error”);
}
DHT11.read(dht11Pin);
sicaklik = (float)DHT11.temperature;
nem = (float)DHT11.humidity;
String veri = “GET https://api.thingspeak.com/update?api_key=2F55993RWVDCTSUS“; //Thingspeak komutu. Key kısmına kendi api keyimizi yazıyoruz. //Göndereceğimiz sıcaklık değişkeni
veri += “&field1=”;
veri += String(sicaklik);
veri += “&field2=”;
veri += String(nem); //Göndereceğimiz nem değişkeni
veri += “\r\n\r\n”;
esp.print(“AT+CIPSEND=”); //ESP’ye göndereceğimiz veri uzunluğunu veriyoruz.
esp.println(veri.length()+2);
delay(2000);
if(esp.find(“>”)){ //ESP8266 hazır olduğunda içindeki komutlar çalışıyor.
esp.print(veri); //Veriyi gönderiyoruz.
Serial.println(veri);
Serial.println(“Veri gonderildi.”);
delay(1000);
}
Serial.println(“Baglantı Kapatildi.”);
esp.println(“AT+CIPCLOSE”); //Bağlantıyı kapatıyoruz
delay(1000); //Yeni veri gönderimi için 1 dakika bekliyoruz.
}
Bu kodla exit status 1 hatası alıyorum. Hata şöyle:
Arduino:1.8.9 (Windows Store 1.8.21.0) (Windows 10), Kart:”Arduino/Genuino Uno”
In function ‘global constructors keyed to 65535_0_sketch_mar24a.ino.cpp.o’:
lto1.exe: internal compiler error: Segmentation fault
Please submit a full bug report,
with preprocessed source if appropriate.
See for instructions.
lto-wrapper.exe: fatal error: C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.21.0_x86__mdqgnx93n4wtt\hardware\tools\avr/bin/avr-gcc returned 1 exit status
compilation terminated.
c:/program files/windowsapps/arduinollc.arduinoide_1.8.21.0_x86__mdqgnx93n4wtt/hardware/tools/avr/bin/../lib/gcc/avr/5.4.0/../../../../avr/bin/ld.exe: error: lto-wrapper failed
collect2.exe: error: ld returned 1 exit status
exit status 1
Arduino/Genuino Uno kartı için derleme hatası.
Sizce ne yapabilirim?
BU KODLARIN HATALARINI ÇÖZEMEDİM BİR YARDIM EDERSENİZ SEVİNİRİM:)
engel_alg_layan_kod:9:23: error: conflicting declaration ‘int A0’
D:\DÖKÃœMAN\ARDUÄ°NO PROJE FATÄ°H MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino:14:5: note: in expansion of macro ‘sag_ldr_deger’
In file included from C:\Program Files (x86)\Arduino\hardware\arduino\avr\cores\arduino/Arduino.h:257:0,
from sketch\engel_alg_layan_kod.ino.cpp:1:
C:\Program Files (x86)\Arduino\hardware\arduino\avr\variants\standard/pins_arduino.h:65:22: note: previous declaration as ‘const uint8_t A0’
static const uint8_t A0 = PIN_A0;
^
engel_alg_layan_kod:14:19: error: expected unqualified-id before ‘=’ token
engel_alg_layan_kod:10:22: error: conflicting declaration ‘int A1’
D:\DÖKÃœMAN\ARDUÄ°NO PROJE FATÄ°H MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino:15:5: note: in expansion of macro ‘on_ldr_deger’
In file included from C:\Program Files (x86)\Arduino\hardware\arduino\avr\cores\arduino/Arduino.h:257:0,
from sketch\engel_alg_layan_kod.ino.cpp:1:
C:\Program Files (x86)\Arduino\hardware\arduino\avr\variants\standard/pins_arduino.h:66:22: note: previous declaration as ‘const uint8_t A1’
static const uint8_t A1 = PIN_A1;
^
engel_alg_layan_kod:11:23: error: conflicting declaration ‘int A2’
D:\DÖKÃœMAN\ARDUÄ°NO PROJE FATÄ°H MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino:16:5: note: in expansion of macro ‘sol_ldr_deger’
In file included from C:\Program Files (x86)\Arduino\hardware\arduino\avr\cores\arduino/Arduino.h:257:0,
from sketch\engel_alg_layan_kod.ino.cpp:1:
C:\Program Files (x86)\Arduino\hardware\arduino\avr\variants\standard/pins_arduino.h:67:22: note: previous declaration as ‘const uint8_t A2’
static const uint8_t A2 = PIN_A2;
^
D:\DÖKÃœMAN\ARDUÄ°NO PROJE FATÄ°H MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino: In function ‘void loop()’:
engel_alg_layan_kod:47:16: error: expected primary-expression before ‘=’ token
engel_alg_layan_kod:47:28: error: ‘sag_ldr_pin’ was not declared in this scope
engel_alg_layan_kod:48:28: error: ‘sol_ldr_pin’ was not declared in this scope
engel_alg_layan_kod:49:27: error: ‘on_ldr_pin’ was not declared in this scope
engel_alg_layan_kod:51:16: error: expected primary-expression before ‘=’ token
engel_alg_layan_kod:52:16: error: expected primary-expression before ‘=’ token
In file included from sketch\engel_alg_layan_kod.ino.cpp:1:0:
engel_alg_layan_kod:9:25: error: expected ‘)’ before ‘;’ token
C:\Program Files (x86)\Arduino\hardware\arduino\avr\cores\arduino/Arduino.h:95:35: note: in definition of macro ‘constrain’
#define constrain(amt,low,high) ((amt)(high)?(high):(amt)))
^
D:\DÖKÃœMAN\ARDUÄ°NO PROJE FATÄ°H MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino:52:27: note: in expansion of macro ‘sag_ldr_deger’
engel_alg_layan_kod:9:25: error: expected ‘)’ before ‘;’ token
C:\Program Files (x86)\Arduino\hardware\arduino\avr\cores\arduino/Arduino.h:95:35: note: in definition of macro ‘constrain’
#define constrain(amt,low,high) ((amt)(high)?(high):(amt)))
^
D:\DÖKÃœMAN\ARDUÄ°NO PROJE FATÄ°H MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino:52:27: note: in expansion of macro ‘sag_ldr_deger’
C:\Program Files (x86)\Arduino\hardware\arduino\avr\cores\arduino/Arduino.h:95:38: error: expected primary-expression before ‘)’ token
#define constrain(amt,low,high) ((amt)(high)?(high):(amt)))
^
D:\DÖKÃœMAN\ARDUÄ°NO PROJE FATÄ°H MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino:52:17: note: in expansion of macro ‘constrain’
C:\Program Files (x86)\Arduino\hardware\arduino\avr\cores\arduino/Arduino.h:95:57: error: expected primary-expression before ‘)’ token
#define constrain(amt,low,high) ((amt)(high)?(high):(amt)))
^
D:\DÖKÃœMAN\ARDUÄ°NO PROJE FATÄ°H MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino:52:17: note: in expansion of macro ‘constrain’
C:\Program Files (x86)\Arduino\hardware\arduino\avr\cores\arduino/Arduino.h:95:77: error: expected primary-expression before ‘)’ token
#define constrain(amt,low,high) ((amt)(high)?(high):(amt)))
^
D:\DÖKÃœMAN\ARDUÄ°NO PROJE FATÄ°H MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino:52:17: note: in expansion of macro ‘constrain’
engel_alg_layan_kod:54:16: error: assignment of read-only variable ‘A2’
engel_alg_layan_kod:55:16: error: assignment of read-only variable ‘A2’
engel_alg_layan_kod:57:16: error: ‘on_ldr_Min’ was not declared in this scope
engel_alg_layan_kod:58:15: error: assignment of read-only variable ‘A1’
engel_alg_layan_kod:9:25: error: expected ‘)’ before ‘;’ token
D:\DÖKÃœMAN\ARDUÄ°NO PROJE FATÄ°H MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino:62:48: note: in expansion of macro ‘sag_ldr_deger’
engel_alg_layan_kod:62:61: error: expected primary-expression before ‘)’ token
engel_alg_layan_kod:9:25: error: expected ‘)’ before ‘;’ token
D:\DÖKÃœMAN\ARDUÄ°NO PROJE FATÄ°H MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino:64:6: note: in expansion of macro ‘sag_ldr_deger’
engel_alg_layan_kod:64:19: error: expected primary-expression before ‘>’ token
engel_alg_layan_kod:64:39: error: expected primary-expression before ‘>’ token
engel_alg_layan_kod:65:81: error: ‘else’ without a previous ‘if’
engel_alg_layan_kod:68:25: error: ‘motorkontrol’ was not declared in this scope
engel_alg_layan_kod:70:47: error: ‘motorkontrol’ was not declared in this scope
engel_alg_layan_kod:71:21: error: ‘motorkontrol’ was not declared in this scope
D:\DÖKÃœMAN\ARDUÄ°NO PROJE FATÄ°H MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino: In function ‘void kalibrasyon()’:
engel_alg_layan_kod:79:29: error: expected primary-expression before ‘=’ token
engel_alg_layan_kod:79:42: error: ‘sag_ldr_pin’ was not declared in this scope
engel_alg_layan_kod:9:25: error: expected ‘)’ before ‘;’ token
D:\DÖKÃœMAN\ARDUÄ°NO PROJE FATÄ°H MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino:80:19: note: in expansion of macro ‘sag_ldr_deger’
engel_alg_layan_kod:80:33: error: expected primary-expression before ‘<' token
engel_alg_layan_kod:81:44: error: expected primary-expression before ']' token
D:\DÖKÜMAN\ARDUİNO PROJE FATİH MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino:86:15: warning: lambda capture initializers only available with -std=c++14 or -std=gnu++14
engel_alg_layan_kod:86:42: error: expected ',' before ';' token
engel_alg_layan_kod:86:42: error: expected identifier before ';' token
engel_alg_layan_kod:86:42: error: expected ']' before ';' token
D:\DÖKÜMAN\ARDUİNO PROJE FATİH MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino: In lambda function:
engel_alg_layan_kod:86:42: error: expected '{' before ';' token
D:\DÖKÜMAN\ARDUİNO PROJE FATİH MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino: In function 'void kalibrasyon()':
engel_alg_layan_kod:86:44: error: expected primary-expression before ']' token
engel_alg_layan_kod:90:34: error: 'on_ldr_Min' was not declared in this scope
D:\DÖKÜMAN\ARDUİNO PROJE FATİH MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino:91:15: warning: lambda capture initializers only available with -std=c++14 or -std=gnu++14
engel_alg_layan_kod:91:40: error: expected ',' before ';' token
engel_alg_layan_kod:91:40: error: expected identifier before ';' token
engel_alg_layan_kod:91:40: error: expected ']' before ';' token
D:\DÖKÜMAN\ARDUİNO PROJE FATİH MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino: In lambda function:
engel_alg_layan_kod:91:40: error: expected '{' before ';' token
D:\DÖKÜMAN\ARDUİNO PROJE FATİH MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino: In function 'void kalibrasyon()':
engel_alg_layan_kod:91:42: error: expected primary-expression before ']' token
engel_alg_layan_kod:96:56: error: 'on_ldr_Min' was not declared in this scope
D:\DÖKÜMAN\ARDUİNO PROJE FATİH MUSTAFA\engel_alg_layan_kod\engel_alg_layan_kod.ino: At global scope:
engel_alg_layan_kod:99:13: error: expected declaration before '}' token
exit status 1
conflicting declaration 'int A0'
Türkçe karakter yazmadan deneyiniz.
Arduino:1.6.2 (Windows 10), Kart:”Arduino Uno”
dd.ino:11:1: error: expected unqualified-id before ‘\x2829’
dd.ino:26:1: error: expected unqualified-id before ‘\x2829’
Derleme sırasında hata oluştu.
Rapor daha fazla veri içermeli
“Derleme sırasında ayrıntılı çıktı göster”
Dosya > Tercihler’de etkinleştirilmiş.
Arduino/Genuino Uno kartı için derleme hatası. ben bu hatayı alıyorum yardımcı olurmusunuz acaba ?
#include
void setup() {
pinMode(A0,INPUT);
Joystick.begin();
}
void loop() {
int gelenDeger = analogRead(A0);
int mapped = map(gelenDeger,957,1023,255,0);
if((mapped *2) >= 255 ){
Joystick.setThrottle(mapped);
}else {Joystick.setThrottle(mapped);}
}
error 516 unable to write broken pipe hata çözümü acil.
arkadaşlar ben INSTAL`a basıyorum ama BU PROGRAM DAHA ÖNCE BAŞARIYLA YÜKLENDİ yazıyor , kod kısmına geldiğimde PORT seçilmiyo
Arduino:1.8.9 (Windows Store 1.8.21.0) (Windows 10), Kart:”Arduino Nano, ATmega328P”
In function ‘global constructors keyed to 65535_0_lcd.ino.cpp.o’:
lto1.exe: internal compiler error: Segmentation fault
Please submit a full bug report,
with preprocessed source if appropriate.
See for instructions.
lto-wrapper.exe: fatal error: C:\Program Files\WindowsApps\ArduinoLLC.ArduinoIDE_1.8.21.0_x86__mdqgnx93n4wtt\hardware\tools\avr/bin/avr-gcc returned 1 exit status
compilation terminated.
c:/program files/windowsapps/arduinollc.arduinoide_1.8.21.0_x86__mdqgnx93n4wtt/hardware/tools/avr/bin/../lib/gcc/avr/5.4.0/../../../../avr/bin/ld.exe: error: lto-wrapper failed
collect2.exe: error: ld returned 1 exit status
exit status 1
Arduino Nano kartı için derleme hatası.
hata nedir? lütfen geri dönüş yapın
“Error compiling for board Arduino Nano” şeklinde bir hata alıyorum bunu nasıl düzeltebilirim.
yardımcı olursanız sevinirim.
Nano klon da PC ye bağladığımda l ışığı hızlıca yanıp sünüyor ve yükleme yapamıyorum neden olabilr yardımıcı olur musunuz
Teşekkürler
Arkadaşlar merhaba arduino üzerinden esp 32 ye wifi kodu göndermek için uğraşıyordum.Dün açılan arduino programı bugün açılmıyor.Programı kaldırıp tekrar yükledim fakat program hiçbir türlü açılmıyor.Yardımcın olabilir misiniz?
https://downloads.arduino.cc/packages/package_index.json dosya imza doğrulama başarısız. Dosya yoksayıldı
Bu hatanın sebebi ve çözümü hakkında yardımcı olurmusunuz
bluetooth ile RGB led yakma uygulamasını yapıyordum fakat
Seçilen seri port “avrdude: initialization failed, rc=-1
” bağlı olan kartınızda mevcut değil
bu problemle karşılaştım.
ne yapmalıyım?
Bende Şöyle bi Hata Var invalid use of template-name ‘Rfid134’ without an argument list Nasıl Çözebilirim
Arkadaşlar merhaba, klon arduino uno ile Ldr sensor kullanarak servo motora yön vermek amacıyla yaptığım proje, Arduino bilgisayara bağlı iken sorunsuz çalışıyor, ancak usb kablosu çıkarılıp, başka bir güç kaynağına geçince çalışmıyor, konu ile ilglili bilgisi olanlar yardımcı olabilir mi, ?
Bilen varsa arduinomda rx pininde hiçbirşey takılı olmamasına rağmen sürekli takılı gösteriyor.
#include
Servo srvnesne;
const int trigger_pin=7;
const int echo_pin=6;
int zaman,uzaklik;
void setup() {
pinMode(trigger_pin,OUTPUT);
pinMode(echo_pin,INPUT);
srvnesne.attach(10);
}
void loop() {
digitalWrite(trigger_pin,HIGH);
delay(1000);
digitalWrite(echo_pin,LOW);
zaman=pulseIn(echo_pin,HIGH);
uzaklik=(zaman/2/29.1);
if(uzaklik<=4);
{
srvnesne.write(60);
delay(1000);
}
else
{
srvnesne.write(90);
}
}
ben böyle bir kod yazdım ama else without a previous if hatası verdi yardım edermisiniz
if(uzaklik<=4) kısmından sonra noktalı virgül koymuşsunuz kaldırırsanız çözülecektir, iyi çalışmalar
Derleme seçenekleri değiştirildi, tümü yeniden derleniyor.
Çalışmanız programın 1460 bayt (0 %) saklama alanını kullandı. Maksimum 253952 bayt.
Global değişkenler belleğin 9 byte kadarını (0%) kullanıyor. Yerel değişkenler için 8183 byte yer kalıyor. En fazla 8192 byte kullanılabilir.
Hatası alıyorum yardımcı olablir misiniz?
Arduino da bir çok devre yaptım ama şu an kaydedilen dosyalara bakınca hepsi beyaz sayfa olarak görünüyor düzeltemedim ve acılmıyor bu kaydettiğim çalışmalar yardımcı olursanız çok sevinirim
yazdığım kodu derlediğim zaman bana
Kullanılmıyor: C:\Program
exit status 1
Arduino Nano kartı için derleme hatası.
bu hata mesajını veriyor ne olduğnu anlamış değilim
Hocam bende kod yüklerken şöyle bir sorun çıkıyor;
C:\Program Files (x86)\mBlock\Arduino\arduino_debug.exe –upload –board arduino:avr:uno –port COM3 –verbose –preserve-temp-files D:\Users\AFFAN\AppData\Roaming\com.makeblock.Scratch3.4.12\Local Store\scratchTemp\project_Untitled10_5\project_Untitled10_5.ino
Loading configuration…
Initializing packages…
Preparing boards…
Verifying and uploading…
Wire klas鰎黱deki k黷黳hane kullan齦齳or: C:\Program Files (x86)\mBlock\Arduino\hardware\arduino\avr\libraries\Wire
SoftwareSerial klas鰎黱deki k黷黳hane kullan齦齳or: C:\Program Files (x86)\mBlock\Arduino\hardware\arduino\avr\libraries\SoftwareSerial
C:\Program Files (x86)\mBlock\Arduino\hardware\tools\avr/bin/avr-g++ -c -g -Os -w -fno-exceptions -ffunction-sections -fdata-sections -fno-threadsafe-statics -MMD -mmcu=atmega328p -DF_CPU=16000000L -DARDUINO=10605 -DARDUINO_AVR_UNO -DARDUINO_ARCH_AVR -IC:\Program Files (x86)\mBlock\Arduino\hardware\arduino\avr\cores\arduino -IC:\Program Files (x86)\mBlock\Arduino\hardware\arduino\avr\variants\standard -IC:\Program Files (x86)\mBlock\Arduino\hardware\arduino\avr\libraries\Wire -IC:\Program Files (x86)\mBlock\Arduino\hardware\arduino\avr\libraries\SoftwareSerial D:\Users\A****\AppData\Local\Temp\build1783418746923355174.tmp\project_Untitled10_5.cpp -o D:\Users\A****\AppData\Local\Temp\build1783418746923355174.tmp\project_Untitled10_5.cpp.o
project_Untitled10_5.ino:6:1: error: ‘MeDCMotor’ does not name a type
project_Untitled10_5.ino:7:1: error: ‘MeDCMotor’ does not name a type
project_Untitled10_5.ino: In function ‘void move(int, int)’:
project_Untitled10_5.ino:26:7: error: ‘motor_9’ was not declared in this scope
project_Untitled10_5.ino:26:24: error: ‘M1’ was not declared in this scope
Galiba driver ile alakalı bir sorun var çünkü mBlock ile yüklüyordum ama en küçük kodda bile bu hata çıktı ne yapabilirim.
Kart model: 16U2
Çalışmanız programın 1450 bayt (4 %) saklama alanını kullandı.
Maksimum 32256 bayt.
Global değişkenler belleğin 11 byte kadarını (0%) kullanıyor. Yerel değişkenler için 2037 byte yer kalıyor.
En fazla 2048 byte kullanılabilir.
avrdude: ser_open(): can’t set com-state for “\\.\COM3”
Taslak yüklenirken bir hata oluştu
COM 3 dışında başka COM varsa onu deneyin
Arduino:1.8.10 (Windows 10), Kart:”Arduino Uno”
Çalışmanız programın 924 bayt (2 %) saklama alanını kullandı. Maksimum 32256 bayt.
Global değişkenler belleğin 9 byte kadarını (0%) kullanıyor. Yerel değişkenler için 2039 byte yer kalıyor. En fazla 2048 byte kullanılabilir.
avrdude: verification error, first mismatch at byte 0x0000
0x62 != 0x0c
avrdude: verification error; content mismatch
avrdude: verification error; content mismatch
bu hatanın sebebi nedir acaba
Çalışmanız programın 2690 bayt (8 %) saklama alanını kullandı. Maksimum 32256 bayt.
Global değişkenler belleğin 28 byte kadarını (1%) kullanıyor. Yerel değişkenler için 2020 byte yer kalıyor. En fazla 2048 byte kullanılabilir.
her zaman bu sorunu Alıyorum Lütfen yardım edermisiniz
Merhabalar , esp8266 kütüphanesi için arduino ide programında birden fazla esp8266 kütüphanesi birden fazla bulunmuştur diye hata veriyor. Hatanın nedenini biliyor musunuz?
ESP8266Wifi.h kütüphanesinin fazla bulunduğu hatasını veriyor.
Arduino/Genuino Uno kartı için derleme hatası.
abi benim arduino uno ya herşeyi yukluyor ama yeni nano aldım karta yuklenirken bir hata oluştu diyor kartlarda nano seçili atmega328p seçili hep boyle oluyor ledi yakamyorum cevablarnız bekliyorum
Selamlar arduino unom da ki L yazan led yanıp yanıp sönüyor ve karta bir şeyler yüklenemiyor
acaba nedeni nedir?
merhaba
Ignoring bad library name
hatasıs alıyorum ve arduino ıde açılmıyor
Arduino nano için yükleme sırasında
Avrdude : atk500…….. diye devam eden hatayı alıyordum baya uğraştırdı “araçlar” da “işlemci” yi “ATmega328P(Old Bootloader)” seçtim ve yükleme hatası vermedi başarılı şekilde yükleme tamam bilginize arkadaşlar
#define b1 A0
#define b2 A1
#define buzzer 11
void setup() {
// put your setup code here, to run once:
pinMode(b1, OUTPUT);
pinMode(b2, OUTPUT);
pinMode(buzzer, OUTPUT);
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
Serial.println(analogRead(b1));
Serial.println(analogRead(b2));
if (analogRead(b1) = 255){
analogWrite(buzzer, 125);
}
else (analogRead(b1) = 1){
analogWrite(buzzer, 0);
}
if (analogRead(b2) = 255){
analogWrite(buzzer, 250);
}
else (analogRead(b2) = 1){
analogWrite(buzzer, 0);
}
}
Aşağıdaki Hatayı Alıyorum Nedeni Nedir Acaba
exit status 1
lvalue required as left operand of assignment
else (analogRead(b2) = 1){
Satırında Hata Varmış Ama Hatanın Ne Olduğunu Anlayamadım
çıkış durumu 1
DHT.h: Böyle bir dosya veya dizin yok
çıkış durumu 1
‘DHT’ bir türe isim vermez
çıkış durumu 1
‘<' belirtecinden önce kalifiye olmayan kimlik bekleniyor
çıkış durumu 1
'lcd' bu kapsamda beyan edilmedi
Merhabalar.arduino uno da yazdigim kodu mega2560 da kullana bilmirmiyim?
Kodum basit “if-else” komutlarindan olusuyor!
exit status 1
stray ‘\304’ in program
böyle bi hata alıyorum bana yardımcı olabilr misiniz
(((
# define echoPin 6
# define trigPin 7
# define buzzerPin 8
int maximumRange = 50 ;
int minimumRange = 0 ;
void setup() {
pinMode (trigPin, OUTPUT
pinMode (echoPin, INPUT
pinMode (buzzerPin,OUTPUT
}
void loop () {
int olcum = mesafe (maximumRange, minimumRange);
}
int mesafe ( int maxrange, int minrange)
{
long duraction, distance;
digitalWrite(trigPin,LOW);
delayMicroseconds(2);
digitalWrite(trigPin,HIGH);
delayMicroseconds(10);
digitalWrite(trigPin,LOW);
duraction= pulseIn(echoPin,HIGH);
distane = duraction / 58.2;
delay(50);
if(distance >= maxrange || distance <= minrange)
return 0;
return distance;
}
int meoldi(int dly)
{
tone(buzzerPin, 440);
delay(dly);
noTone(buzzerPİn);
delay(dly);
}
}
))
null adresi kullanılmıyor
Ben bilim fuarında bir proje yapmak istiyorum.Robot kolu programlarken veya test ederken her 5-6 seferde bir
“avrdude stk500_recv() programmer is not responding
avrdude stk500_getsync() attempt 1 of 10 not in sync resp=0x01
avrdude stk500_recv() programmer is not responding
avrdude stk500_getsync() attempt 2 of 10 not in sync resp=0x01…”
hatası veriyor ve o hatayı veren arduinoya bir daha hiçbir kod yükleyemiyorum(kısacası yanıyor).
Ardunio uno ya boot loader yüklerken on Yükleyici yazdirilirken hatasi alıyorum not (bütün bağlantılar doğru ) lütfen yardım edin
merhaba arduino nun hiçbir portunda hiçbir şekilde bir kablo bağlı değil
ama
Taslak yüklenirken bir hata oluştu
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0xd1
avrdude: stk500_recv(): programmer is not responding
şeklinde hata alıyorum acaba nedeni ne olabilir
Arduino uno kütüphanelerini mega için kullanabilirmiyiz veya herhangi başka arduino modeli için?
Arduino içerisinde yer alan standart kütüphaneleri kullanabilirsiniz. Harici olarak yüklediğiniz kütüphanede ise desteklenen kartları dökümantasyonundan inceleyerek kullanmanız gerekir.
Arduino:1.8.12 (Windows 10), Kart:”Arduino Mega or Mega 2560, ATmega2560 (Mega 2560)”
loading libs from C:\Users\DİRENÇ\Documents\Arduino\libraries: loading library from C:\Users\DİRENÇ\Documents\Arduino\libraries\Adafruit_Circuit_Playground: loading library.properties: Error reading file: open C:\Users\DİRENÇ\Documents\Arduino\libraries\Adafruit_Circuit_Playground\library.properties: Erişim engellendi.
Arduino Mega or Mega 2560 kartı için derleme hatası.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
merhabalar , kütüphaneye erişim engellendi hatası alıyorum ne yapacağımı bilemiyorum com portu ile alakası olan bir durum da değil, arduino ideyi ; kod yazıp , hex dosyasını alıp protheusta çalıştıracağım sadece kartı pcye takmadan bile derlemeye başlayamıyor lütfen yardım edin çok sinirlerim bozuldu, daha önce hiç böyle bir şey başıma gelmemişti, Hiç bir yerde de sorunun çözümünü bulamadım , güncel 1.8.12 ideyi kullanıyorum
Kütüphane hatası alıyorsunuz. Kütüphane dosyalarınızı C:\Program Files (x86)\Arduino\libraries klasörünüze kopyalamayı deneyebilirsiniz.
Arduino:1.8.12 (Windows 10), Kart:”Arduino Uno”
C:\Users\Casper\AppData\Local\Temp\ccRXCgd4.ltrans0.ltrans.o: In function `main’:
C:\Program Files (x86)\Arduino\hardware\arduino\avr\cores\arduino/main.cpp:43: undefined reference to `setup’
C:\Program Files (x86)\Arduino\hardware\arduino\avr\cores\arduino/main.cpp:46: undefined reference to `loop’
collect2.exe: error: ld returned 1 exit status
exit status 1
Arduino Uno kartı için derleme hatası.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
Extra: Arduino’nun 0.pininde (RX) bir bağlantı var mı? Bölümünü eklediğiniz için teşekür ederim.Progremmer not responding hatası alıyordum, yabancı sitelere baktım o kadarda araştırdım burada çözümü buldum tekrardan teşekkür ederiö
arduino mega için ”TASLAK YÜKLENİRKEN BİR HATA OLUŞTU ” hatası alıyorum düzeltmek için ne yapmam gerekiyor
null adresindeki kart kullanılamıyor hatası alıyorum
Bir bluetoothlu araba projesi yapıyorum ama indirdiğim kütüphaneyi algılamıyor?
bunlarda kodlar#include
#include
#include
double angle_rad = PI/180.0;
double angle_deg = 180.0/PI;
void ileri();
void geri();
void sag();
void sol();
void dur();
double bluetooth;
SoftwareSerial btKontrol(0,1);
int sayiVeri=0;
char karakterVeri;
void ileri()
{
analogWrite(10,255);
digitalWrite(8,0);
digitalWrite(9,1);
analogWrite(5,255);
digitalWrite(6,0);
digitalWrite(7,1);
}
void geri()
{
analogWrite(10,255);
digitalWrite(8,1);
digitalWrite(9,0);
analogWrite(5,255);
digitalWrite(6,1);
digitalWrite(7,0);
}
void sag()
{
analogWrite(10,255);
digitalWrite(8,0);
digitalWrite(9,1);
analogWrite(5,255);
digitalWrite(6,1);
digitalWrite(7,0);
}
void sol()
{
analogWrite(10,255);
digitalWrite(8,1);
digitalWrite(9,0);
analogWrite(5,255);
digitalWrite(6,0);
digitalWrite(7,1);
}
void dur()
{
analogWrite(10,255);
digitalWrite(8,0);
digitalWrite(9,0);
analogWrite(5,255);
digitalWrite(6,0);
digitalWrite(7,0);
}
void setup(){
btKontrol.begin(9600);
pinMode(10,OUTPUT);
pinMode(8,OUTPUT);
pinMode(9,OUTPUT);
pinMode(5,OUTPUT);
pinMode(6,OUTPUT);
pinMode(7,OUTPUT);
}
void loop(){
if(btKontrol.available()){
sayiVeri=btKontrol.parseInt();
karakterVeri=btKontrol.read();
bluetooth = karakterVeri;
if(((bluetooth)==(“F”))){
ileri();
}
if(((bluetooth)==(“B”))){
geri();
}
if(((bluetooth)==(“L”))){
sol();
}
if(((bluetooth)==(“R”))){
sag();
}
if(((bluetooth)==(“S”))){
dur();
}
}
_loop();
}
void _delay(float seconds){
long endTime = millis() + seconds * 1000;
while(millis() < endTime)_loop();
}
void _loop(){
}
Çalışmanız programın 2044 bayt (6 %) saklama alanını kullandı. Maksimum 32256 bayt.
Global değişkenler belleğin 9 byte kadarını (0%) kullanıyor. Yerel değişkenler için 2039 byte yer kalıyor. En fazla 2048 byte kullanılabilir.
Merhaba,
#include
int pirPin=8;
int ServoPin9;
int hareket;
Servo motor;
void setup() {
motor.attach(servoPin);
pinMode(pirPin, INPUT);
}
void loop() {
hareket = digitalRead(pirPin);
if(hareket ==HIGH){
motor.write(150);
delay(250);
motor.write(30);
delay(250);
motor.write(150);
delay(250);
motor.write(30);
delay(250);
motor.write(90);
}
else {
motor.write(90);
}
}#include
int pirPin=8;
int ServoPin9;
int hareket;
Servo motor;
void setup() {
motor.attach(servoPin);
pinMode(pirPin, INPUT);
}
void loop() {
hareket = digitalRead(pirPin);
if(hareket ==HIGH){
motor.write(150);
delay(250);
motor.write(30);
delay(250);
motor.write(150);
delay(250);
motor.write(30);
delay(250);
motor.write(90);
}
else {
motor.write(90);
}
}
Bu kodu derlediğimde motor.attach(servoPin); kısmını gösteriyor ve
exit status 1
‘servoPin’ was not declared in this scope
hatası veriyor. Bunu çözmek için ne yapabilirim ?
merhaba aşağıdaki kodta hata veriyor amam bulmadım yardımcı olur musunuz.
#include
#include
#include
#define CE_PIN 9
#define CSN_PIN 10
#define echoPin 1
#define trigPin 8
#define OUTPUT
#define INPUT
const uint64_t pipe = 0xE8E8F0F0E1LL;
RF24 radio(CE_PIN, CSN_PIN);
int data[2];
const int Motor1_Ileri = 4;//Sağ Motor
const int Motor1_Geri = 2;
const int Motor1_PWM = 3;
const int Motor2_Ileri = 7;//Sol Motor
const int Motor2_Geri = 6;
const int Motor2_PWM = 5;
void setup()
{
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(Motor1_Ileri, OUTPUT);
pinMode(Motor1_Geri, OUTPUT);
pinMode(Motor1_PWM, OUTPUT);
pinMode(Motor2_Ileri, OUTPUT);
pinMode(Motor2_Geri, OUTPUT);
pinMode(Motor2_PWM, OUTPUT);
Serial.begin(9600);
radio.begin();
radio.openReadingPipe(1,pipe);
radio.startListening();;
}
void loop()
{
int olcum = mesafe();
if(olcum = 400 && y = 800 && y = 0 && y = 0 && x = 600 && x <= 1023) {
digitalWrite(Motor1_Ileri,HIGH);
digitalWrite(Motor1_Geri,LOW);
analogWrite(Motor1_PWM,255);
digitalWrite(Motor2_Ileri,LOW);
digitalWrite(Motor2_Geri,HIGH);
analogWrite(Motor2_PWM,255);
}
}
}
}
Arduino:1.8.12 (Windows 7), Kart:”Arduino Uno”
C:\Users\Asus\AppData\Local\Temp\arduino_modified_sketch_358993\sketch_jun06a.ino: In function ‘void loop()’:
sketch_jun06a:12:16: error: could not convert ‘digitalWrite(1, 1)’ from ‘void’ to ‘bool’
if(digitalWrite(1,HIGH)){
~~~~~~~~~~~~^~~~~~~~
sketch_jun06a:14:1: error: expected ‘;’ before ‘}’ token
}
^
sketch_jun06a:15:16: error: could not convert ‘digitalWrite(2, 1)’ from ‘void’ to ‘bool’
if(digitalWrite(2,HIGH)){
~~~~~~~~~~~~^~~~~~~~
sketch_jun06a:17:1: error: expected ‘;’ before ‘}’ token
}
^
sketch_jun06a:18:16: error: could not convert ‘digitalWrite(3, 1)’ from ‘void’ to ‘bool’
if(digitalWrite(3,HIGH)){
~~~~~~~~~~~~^~~~~~~~
sketch_jun06a:20:1: error: expected ‘;’ before ‘}’ token
}
^
sketch_jun06a:23:1: error: expected ‘;’ before ‘}’ token
}
^
exit status 1
could not convert ‘digitalWrite(1, 1)’ from ‘void’ to ‘bool’
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
bende bu hata veriyor
KOD:
#include
Servo motor;
void setup() {
motor.attach(4);
pinMode(1,INPUT);
pinMode(2,INPUT);
pinMode(3,INPUT);
}
void loop() {
if(digitalWrite(1,HIGH)){
motor.write(60)
}
if(digitalWrite(2,HIGH)){
motor.write(120)
}
if(digitalWrite(3,HIGH)){
motor.write(180)
}
else{
motor.write(0)
}
}
burda bir butona basınca bir dereceye gitmesini istedim
bunu nasıl düzeltirsem bir butona basınca servo motoroun 60 a diğer butona basınca 120 dereceye gitmesini sağlayabilirim?
exit status 1
expected initializer before ‘digitalWrite’ bu htayı veriyor lütfen yardım edin doğru yapıyorum bence
//TRIG pini tanımlıyoruz
int trigPin=12;
//echo pini tanımlıyoruz
int echoPin=11;
void setup()
{
//trig pini digital çıkış olarak tanımlıyoruz
pinMode(trigPin, OUTPUT);
//echo pini dijital olarak tanımlıyoruz
Serial.begin(9600);
}
void loop()
{
//süre ve uzaklık değişkenlerini tanımlıyoruz
int sure, uzaklik
digitalWrite(trigPin, HIGH);
delayMicroseconds(1000);
digitalWrite(trigPin, LOW);
sure = pulseIn(echoPin, HIGH);
uzaklik = (sure/58)
serial.print(“Uzaklik(cm)= “);
serial.printIn(uzaklik);
}
SoftwareSerial.h: No such file or directory diyor eğer SoftwareSerial.h kütüphanesi geçen bir kod yazarsam
yardımcı olurmusunuz
merhaba ardunio uno kullanıyorum kodlarda bir sıkıntı olmamasına rağmen şu hatayı alıyorum
Karta yüklenirken sorun oluştu
hocam ardunio megayada unoyada kod yükleyebiliyodum ama şimdi yüklemiyor yardımcı olurmusunuz
merhabalar ben “LiquidCrystal” adlı kütüphaneyi yüklemeye çalışıyorum
sürekli aşağıdaki hatayı alıyorum ve bir türlü çözümü bulamadım ne yaptıysam olmadı. yardımcı olabilecek var mıdır?
avrdude: ser_open(): can’t set com-state for “\\.\COM1”
arduinoyu pc ye takıyorum kod yüklicem ama hem yüklenmiyor hatası veriyor hemde kod yüklerken tx ledinin yanması lağzım yanmıyor acil yardımcı olun
Sürücüleri indirdim ama genuinuo board ı yok hayret bir şey ya, kaç gündür bir tane led yakcam diye uğraşıyorum.
#include
#define sensor 2
dht11 DHT11;
void setup() {
pinMode(DHT11, INPUT);
Serial.begin(9600);
}
void loop() {
DHT11.read(sensor);
Serial.print(“sicaklik (Celcius): “);
Serial.println(DHT11.temperature, sensor);
int deger=DHT11.temperature;
delay(2000);
if(deger<24){
Serial.println("çok soğuk");
}
}
sıcaklık ölçmek istiyorum fakat hata veriyor yeni başladım ne yapmalıyım
merhaba ben şöyle bir hata alıyorum yardımcı olursanız çok sevinirim instegram: https://www.instagram.com/seyithalilkokmen/?hl=tr e mail :[email protected]
C:\Users\seyit\Desktop\OttoPLUS_APP_V9\OttoPLUS_APP_V9.ino:19:65: fatal error: SerialCommand.h: No such file or directory
#include //– Library to manage serial commands
^
compilation terminated.
exit status 1
Error compiling for board Arduino Nano.
Hocam benim arduino uno kartım bir projeyi yaparken uzerindeki tüm ışıkları yandı sonra düzelsin diye çıkartıp taktım bu sefer hiçbir ışık yanmıyor ve calismiyor
Ne yapabilirim bir bilginiz varmi
Arkadaşlar ben wavgat uno r3 kullanıyorum ama arduino programı derleme yaparken “WAVGAT UNO R3 için derleme hatası” diye bir hata veriyor… Bu sorunu nasıl çözerim veya sorunun kaynağı nedir yazar mısınız?
Çok teşekkür ederim yarım saattir aldığım hatayı dikkatsizlik sonucu benden kaynaklı olan sorunu bu yazıyı okumam sayesinde daha dikkatli ve hatanın tam ne demek istediğini anladım çözdüm
Arduino:1.8.13 (Windows 10), Kart:”Arduino Uno”
Çalışmanız programın 924 bayt (2 %) saklama alanını kullandı. Maksimum 32256 bayt.
Global değişkenler belleğin 9 byte kadarını (0%) kullanıyor. Yerel değişkenler için 2039 byte yer kalıyor. En fazla 2048 byte kullanılabilir.
avrdude: ser_open(): can’t set com-state for “\\.\COM5”
Taslak yüklenirken bir hata oluştu
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
Bu hata koduna karşı çözüm nedir bilen birisi yardımcı olabilir mi acaba?
avrdude: ser_open(): can’t set com-state for “\\.\COM3”
merhabalar..program yükleme, kod yazma sonrasında yükleme yapmak isterken yukarıdaki hatayı verdi. yardımcı olursanız sevinirim.teşekkürler
ya benim taslak yüklenirken sorun oluyor,bir bakarmısınız
merhabalar ben sizin robotistan sayfasından arduino dersleri alıyorum fakat buton ile led yakma bölümünde bana expected ‘,’ or ‘;’ before void hatası veriyor nedenini lütfen söylermisiniz
bootloader yapmam gerektiğini bilmiyordum
Merhaba ;
Arduino UNO için LCD 5110 kullanımında; BASİC ve GRAPH kütüphanelerini aynı programa eklediğim zaman
“exit status 1
Arduino Uno kartı için derleme hatası.
”
hatası alıyorum. Sebebi ne olabilir? Kütüphaneleri ayrı ayrı çalıştırıyor fakat iki kütüphane aynı kod içerisinde hata veriyor.
Merhaba;
Arduino programını indirdim ve arduino mega ma marlin yazılımını atıcam ama marlin ”ino” dosyası olmadığı için açılmıyor.
Sorunu nasıl çözebilirim
Şimdiden teşekkürler:)
derleme sırasında hata oluştu yazyo nasıl düzeltebilirim
Arkadaşlar ArduinoDroid ile kod yükleyemiyorum Arduinoya. İnternetten yeni bir çip almıştım onu ilktl taktım denedim (bootloader yapmadan) can’t initialize MCU hatası verdi. Şimdi eski çipi takıp kod yüklemeye çalışıyorum yine aynı hatayı veriyor yardım eder misiniz? İnstagram cihan_alpaydn
merhaba şu komutta şöyle bir hata alıyorum çözümü nedir ;
if (data[0] > 10 && data[0] < 14){
digitalWrite(RightMotorForward, LOW);
digitalWrite(RightMotorBackward, HIGH);
digitalWrite(LeftMotorForward, HIGH);
digitalWrite(LeftMotorBackward, LOW);
}
komutunda böyle bir hata alıyorum ;
exit status 1
'data' was not declared in this scope
Bu hatanın çözümü nedir veya bir kütüphane mi indirmem gerek ?
Lütfen acil cevap bekliyorum.
“data” adlı veri tipi bulunamamış, lütfen gerekli değişkenin kullanımına ve oluşturulduğuna emin olunuz.
void setup() {
pinMode(8,OUTPUT);
}
void loop() {
digitalWrite(8,HIGH);
delay(1000);
digitalWrite(8,LOW);
delay(500);
}
c:/users/theo/appdata/local/arduino15/packages/arduino/tools/avr-gcc/7.3.0-atmel3.6.1-arduino7/bin/../lib/gcc/avr/7.3.0/../../../../avr/lib/avr5/crtatmega328p.o:(.init9+0x0): undefined reference to `main’
collect2.exe: error: ld returned 1 exit status
Compilation error: Error: 2 UNKNOWN: exit status 1
merhaba başlangıç kitindeki ilk projeyi yapmaya çalıştım ancak böyle bir hata alıyorum. Yardımcı olur musunuz?
Doğru COM portunu seçtiğinizden, USB kablonuzun çalışır olduğundan ve varsa karta ait sürücüleri yüklediğinizden emin olunuz.
arkadaşlar şu koddaki hatayı bulamadım?
int PinA = 3;
int PinB = 7;
int PinC = 10;
int PinD = 12;
int PinE = 13;
int PinF = 4;
int PinG = 9;
int Segment1 = 2;
int Segment2 = 5;
int Segment3 = 6;
int Segment4 = 8;
int Sayi;
int Binler = 0;
int Yuzler = 0;
int Onlar = 0;
int Birler = 0;
int Bekleme = 5;
void setup()
{
pinMode(PinA, OUTPUT);
pinMode(PinB, OUTPUT);
pinMode(PinC, OUTPUT);
pinMode(PinD, OUTPUT);
pinMode(PinE, OUTPUT);
pinMode(PinF, OUTPUT);
pinMode(PinG, OUTPUT);
pinMode(Segment1, OUTPUT);
pinMode(Segment2, OUTPUT);
pinMode(Segment3, OUTPUT);
pinMode(Segment4, OUTPUT);
}
void loop()
{
digitalWrite(Segment1, LOW);
digitalWrite(Segment2, LOW);
digitalWrite(Segment3, LOW);
digitalWrite(Segment4, LOW);
for (int Sayi = 0; Sayi < 10000; Sayi++)
{
Birler = Sayi % 10;
Onlar = {(Sayi – (Sayi % 10)) % 100}\100;
Yuzler = {(Sayi – (Sayi % 100)) % 1000}\1000;
Binler = {(Sayi – (Sayi % 1000)) % 10000}\10000;
digitalWrite(Segment4, HIGH);
Rakam(Birler);
delay(Bekleme);
digitalWrite(Segment4, LOW);
digitalWrite(Segment3, HIGH);
Rakam(Onlar);
delay(Bekleme);
digitalWrite(Segment3, LOW);
digitalWrite(Segment2, HIGH);
Rakam(Yuzler);
delay(Bekleme);
digitalWrite(Segment2, LOW);
digitalWrite(Segment1, HIGH);
Rakam(Binler);
delay(Bekleme);
digitalWrite(Segment1, LOW);
}
}
void Rakam(int x)
{
switch (x)
{
case 1: Bir(); break;
case 2: Iki(); break;
case 3: Uc(); break;
case 4: Dort(); break;
case 5: Bes(); break;
case 6: Alti(); break;
case 7: Yedi(); break;
case 8: Sekiz(); break;
case 9: Dokuz(); break;
default: Sifir(); break;
}
}
void Bir()
{
digitalWrite(PinA, HIGH);
digitalWrite(PinB, LOW);
digitalWrite(PinC, LOW);
digitalWrite(PinD, HIGH);
digitalWrite(PinE, HIGH);
digitalWrite(PinF, HIGH);
digitalWrite(PinG, HIGH);
}
void Iki()
{
digitalWrite(PinA, LOW);
digitalWrite(PinB, LOW);
digitalWrite(PinC, HIGH);
digitalWrite(PinD, LOW);
digitalWrite(PinE, LOW);
digitalWrite(PinF, HIGH);
digitalWrite(PinG, LOW);
}
void Uc()
{
digitalWrite(PinA, LOW);
digitalWrite(PinB, LOW);
digitalWrite(PinC, LOW);
digitalWrite(PinD, LOW);
digitalWrite(PinE, HIGH);
digitalWrite(PinF, HIGH);
digitalWrite(PinG, LOW);
}
void Dort()
{
digitalWrite(PinA, HIGH);
digitalWrite(PinB, LOW);
digitalWrite(PinC, LOW);
digitalWrite(PinD, HIGH);
digitalWrite(PinE, HIGH);
digitalWrite(PinF, LOW);
digitalWrite(PinG, LOW);
}
void Bes()
{
digitalWrite(PinA, LOW);
digitalWrite(PinB, HIGH);
digitalWrite(PinC, LOW);
digitalWrite(PinD, LOW);
digitalWrite(PinE, HIGH);
digitalWrite(PinF, LOW);
digitalWrite(PinG, LOW);
}
void Alti()
{
digitalWrite(PinA, LOW);
digitalWrite(PinB, HIGH);
digitalWrite(PinC, LOW);
digitalWrite(PinD, LOW);
digitalWrite(PinE, LOW);
digitalWrite(PinF, LOW);
digitalWrite(PinG, LOW);
}
void Yedi()
{
digitalWrite(PinA, LOW);
digitalWrite(PinB, LOW);
digitalWrite(PinC, LOW);
digitalWrite(PinD, HIGH);
digitalWrite(PinE, HIGH);
digitalWrite(PinF, HIGH);
digitalWrite(PinG, HIGH);
}
void Sekiz()
{
digitalWrite(PinA, LOW);
digitalWrite(PinB, LOW);
digitalWrite(PinC, LOW);
digitalWrite(PinD, LOW);
digitalWrite(PinE, LOW);
digitalWrite(PinF, LOW);
digitalWrite(PinG, LOW);
}
void Dokuz()
{
digitalWrite(PinA, LOW);
digitalWrite(PinB, LOW);
digitalWrite(PinC, LOW);
digitalWrite(PinD, LOW);
digitalWrite(PinE, HIGH);
digitalWrite(PinF, LOW);
digitalWrite(PinG, LOW);
}
void Sifir()
{
digitalWrite(PinA, LOW);
digitalWrite(PinB, LOW);
digitalWrite(PinC, LOW);
digitalWrite(PinD, LOW);
digitalWrite(PinE, LOW);
digitalWrite(PinF, LOW);
digitalWrite(PinG, HIGH);
}
DOIT ESP32 DEVKIT V1 kartı için derleme hatası.
alıyorum ne yapmalıyım.
‘buton3_durumu’ was not declared in this scope
bende böyle bir hata alıyorum anlamadım neden herşey gayet düzgün gözüküyor.yardımcı olabilirmisiniz.
Böyle bir değişken olmayabilir, kontrol etmenizi öneririm.
koddaki hatanın ne olduğunu anlamadım
#include
#define trigPin 7
#define echoPin 6
#define buzzerPin 8
#define duration;
#define distance;
int maximumRange = 50;
int minimumRange = 0;
int rs = 12, en = 11, d4 = 5, d5 = 4, d6 = 3, d7 = 2;
LiquidCrystal lcd(rs, en, d4, d5, d6, d7);
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(buzzerPin, OUTPUT);
lcd.begin(16, 2);
}
void loop() {
int olcum = mesafe(maximumRange, minimumRange);
melodi(olcum*10);
}
int mesafe(int maxrange, int minrange)
{
long duration distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(5);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = duration / 58.2;
delay(50);
if(distance >= maxrange || distance <= minrange)
return 0;
return distance;
}
int melodi(int dly)
{
tone(buzzerPin, 440);
delay(dly);
noTone(buzzerPin);
delay(dly);
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Uzaklik:");
lcd.setCursor(0, 1);
lcd.print(uzaklik);
lcd.print("cm");
}
Mac kullaniyorum “programci cevap vermiyor” yaziyor
Marc sürümüne gõre yüklememiş veya güncellememiş olabilirsin diye tahmin ediyorum
Mac😊
sketch_apr14i:5:17: error: expected initializer before ‘-‘ token
const int trig – 8;
^
sketch_apr14i:6:17: error: expected initializer before ‘-‘ token
const int echo – 7;
^
sketch_apr14i:12:7: error: variable or field ‘setup’ declared void
void setup{) {
^~~~~
sketch_apr14i:12:13: error: expected primary-expression before ‘)’ token
void setup{) {
^
sketch_apr14i:12:13: error: expected ‘}’ before ‘)’ token
exit status 1
expected initializer before ‘-‘ token
yardım edin lütfen acillll
Diğer yorumunda dediğim gibi hcr04 ün bu sefer libarysini koymamîş olabilirsin
Arduino:1.8.12 (Windows 8.1), Kart:”Arduino Uno”
sketch_apr14c:5:16: error: stray ‘\342’ in program
const int trig – 8;
^
sketch_apr14c:5:17: error: stray ‘\200’ in program
const int trig – 8;
^
sketch_apr14c:5:18: error: stray ‘\223’ in program
const int trig – 8;
^
sketch_apr14c:5:20: error: expected initializer before numeric constant
const int trig – 8;
^
sketch_apr14c:6:16: error: expected initializer before ‘-‘ token
const int echo – 7;
^
C:\Users\Ultimate\Desktop\sketch_apr14c\sketch_apr14c.ino: In function ‘void setup()’:
sketch_apr14c:14:3: error: ‘servo’ was not declared in this scope
servo.attach(9);
^~~~~
C:\Users\Ultimate\Desktop\sketch_apr14c\sketch_apr14c.ino:14:3: note: suggested alternative: ‘Servo’
servo.attach(9);
^~~~~
Servo
sketch_apr14c:15:10: error: expected ‘;’ before ‘{‘ token
pinMode{echo, INPUT);
^
sketch_apr14c:45:1: error: expected ‘}’ at end of input
}
^
exit status 1
stray ‘\342’ in program
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
Libary eklememiş olma ihtimalini düşünebilir misin
double calculateYawError(struct ReceiverCommands receiverCommands, struct IMU_Values imu_values) {
double imuYawAngleChangeInDeltaTime = fix360degrees(imu_values.CurrentOrientation.YawAngle – imu_values.PreviousOrientation.YawAngle);
double imuYawAngleChangePerSecond = imuYawAngleChangeInDeltaTime / imu_values.DeltaTimeInSeconds;
double yawError = receiverCommands.YawAngleChange – imuYawAngleChangePerSecond;
yawError = constrain(yawError, -QUADCOPTER_MAX_YAW_ANGLE_CHANGE_PER_SECOND, QUADCOPTER_MAX_YAW_ANGLE_CHANGE_PER_SECOND);
return yawError;
}
bu arduino kodumun bir parçası ve ‘receiverCommands’ has incomplete type
diye bir hata alıyorum . Nasıl düzeltebilirim acaba? yardımcı olursanız çok sevinirim .
Arduino:1.8.5 (Windows 10), Kart:”Arduino Uno”
GetFileAttributesEx C:\Users\uskoc\OneDrive\Masaüstü\sketch_apr18a\sketch_apr18a.ino: The system cannot find the file specified.
Error compiling for board Arduino Uno.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
merhaba ılı9341 oled ile stm32f103c ile pc donanım ızleme monıtoru yapmaya calsııyorum ama ne yaptıysam bu hatadan kurtulamadım.
Arduino:1.8.13 (Windows 10), Kart:”Generic STM32F103C series, STM32F103C8 (20k RAM. 64k Flash), STLink, 72Mhz (Normal), Smallest (default)”
C:\Users\hakan\Documents\Arduino\libraries\Adafruit_BusIO\Adafruit_I2CDevice.cpp: In member function ‘bool Adafruit_I2CDevice::write(const uint8_t*, size_t, bool, const uint8_t*, size_t)’:
C:\Users\hakan\Documents\Arduino\libraries\Adafruit_BusIO\Adafruit_I2CDevice.cpp:88:47: error: invalid conversion from ‘const uint8_t* {aka const unsigned char*}’ to ‘uint8* {aka unsigned char*}’ [-fpermissive]
if (_wire->write(prefix_buffer, prefix_len) != prefix_len) {
^
In file included from C:\Program Files (x86)\Arduino\hardware\Arduino_STM32-master\STM32F1\libraries\Wire/Wire.h:42:0,
from C:\Users\hakan\Documents\Arduino\libraries\Adafruit_BusIO/Adafruit_I2CDevice.h:1,
from C:\Users\hakan\Documents\Arduino\libraries\Adafruit_BusIO\Adafruit_I2CDevice.cpp:1:
C:\Program Files (x86)\Arduino\hardware\Arduino_STM32-master\STM32F1\libraries\Wire/utility/WireBase.h:123:12: error: initializing argument 1 of ‘size_t WireBase::write(uint8*, int)’ [-fpermissive]
size_t write(uint8*, int);
^
C:\Users\hakan\Documents\Arduino\libraries\Adafruit_BusIO\Adafruit_I2CDevice.cpp:97:31: error: invalid conversion from ‘const uint8_t* {aka const unsigned char*}’ to ‘uint8* {aka unsigned char*}’ [-fpermissive]
if (_wire->write(buffer, len) != len) {
^
In file included from C:\Program Files (x86)\Arduino\hardware\Arduino_STM32-master\STM32F1\libraries\Wire/Wire.h:42:0,
from C:\Users\hakan\Documents\Arduino\libraries\Adafruit_BusIO/Adafruit_I2CDevice.h:1,
from C:\Users\hakan\Documents\Arduino\libraries\Adafruit_BusIO\Adafruit_I2CDevice.cpp:1:
C:\Program Files (x86)\Arduino\hardware\Arduino_STM32-master\STM32F1\libraries\Wire/utility/WireBase.h:123:12: error: initializing argument 1 of ‘size_t WireBase::write(uint8*, int)’ [-fpermissive]
size_t write(uint8*, int);
^
“Wire.h” için birden fazla library bulundu
Kullanılıyor: C:\Program Files (x86)\Arduino\hardware\Arduino_STM32-master\STM32F1\libraries\Wire
Kullanılmıyor: C:\Program Files (x86)\Arduino\hardware\Arduino_STM32-master\STM32F1\libraries\WireSlave
“Adafruit_SSD1306.h” için birden fazla library bulundu
Kullanılıyor: C:\Users\hakan\Documents\Arduino\libraries\Adafruit_SSD1306
Kullanılmıyor: C:\Users\hakan\Documents\Arduino\libraries\Adafruit_SSD1306-master
exit status 1
Generic STM32F103C series kartı için derleme hatası.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
Arduino:1.8.11 (Windows 10), Kart:”Arduino Uno”
Çalışmanız programın 6374 bayt (19 %) saklama alanını kullandı. Maksimum 32256 bayt.
Global değişkenler belleğin 685 byte kadarını (33%) kullanıyor. Yerel değişkenler için 1363 byte yer kalıyor. En fazla 2048 byte kullanılabilir.
avrdude: ser_open(): can’t open device “\\.\COM3”: Eri�im engellendi.
Karta yüklenirken sorun oluştu. Tavsiyeler için http://www.arduino.cc/en/Guide/Troubleshooting#upload adresine göz atabilirsiniz.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
çözümünü bilen var mı
avrdude: ser_open(): can’t set com-state for “\\.\COM3”
hatası alıyorum lütfen yardım edin
Kabloyu tam bağlamamış veya düzenle kısmından portu seçmemiş olabilirsin
Arduino:1.8.14 (Windows 10), Kart:”LilyPad Arduino, ATmega328P”
C:\Dersler\VIII. Yarıyıl\BİTİRME\KAYNAKLAR\kodlar-yeni\eldiven\verici_eldiven\verici_eldiven.ino: In function ‘void loop()’:
verici_eldiven:41:14: error: ‘fileClass’ was not declared in this scope
C:\Dersler\VIII. Yarıyıl\BİTİRME\KAYNAKLAR\kodlar-yeni\eldiven\verici_eldiven\verici_eldiven.ino:41:14: note: suggested alternative: ‘SPIClass’
verici_eldiven:41:36: error: ‘dir’ was not declared in this scope
C:\Dersler\VIII. Yarıyıl\BİTİRME\KAYNAKLAR\kodlar-yeni\eldiven\verici_eldiven\verici_eldiven.ino:41:36: note: suggested alternative: ‘div’
verici_eldiven:42:14: error: ‘ReadAxis’ was not declared in this scope
exit status 1
‘fileClass’ was not declared in this scope
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
yardımcı olabilir misiniz??
Ben bir I2C modüllü lcd ekran push button ve arduino ile bir runing man game yaptım ama arduino kartı için derleme hatası diyor ve burdaki bütün çözümleri denedim
Ben Bluetooth ile led kontrolü yapmaya çalıştım. Ama telefondan bağlanmaya çalışınca cant comunication hatası veriyor. Çözümünü bilen lütfen yazsın.
RX ve TX bağlantılarını kontrol etmeyi ve sistemi yeniden başlatmayı deneyebilirsiniz.
merhabalar bende karta yüklenirken bir hata var diyor ne yapabilirim?
pardon onları yanlışlıkla yazdı bir soru yok
merhabalarArduino:1.8.13 (Windows 10), Kart:”Arduino Uno”
Çalışmanız programın 892 bayt (2 %) saklama alanını kullandı. Maksimum 32256 bayt.
Global değişkenler belleğin 9 byte kadarını (0%) kullanıyor. Yerel değişkenler için 2039 byte yer kalıyor. En fazla 2048 byte kullanılabilir.
avrdude: ser_open(): can’t open device “\\.\COM3”: Sistem belirtilen dosyay� bulam�yor.
merhabalar bana şunu diyor:
Karta yüklenirken sorun oluştu. Tavsiyeler için http://www.arduino.cc/en/Guide/Troubleshooting#upload adresine göz atabilirsiniz.
ne yapabilirim???
Merhabalar cok acil arduino Ide bi sorun ile karşılaştım bitirme projem olarak, hata kopyası şu
Arduino:1.8.15 (Windows Store 1.8.49.0) (Windows 10), Kart:”NodeMCU 1.0 (ESP-12E Module), 80 MHz, Flash, Disabled (new aborts on oom), Disabled, All SSL ciphers (most compatible), 32KB cache + 32KB IRAM (balanced), Use pgm_read macros for IRAM/PROGMEM, 4MB (FS:1MB OTA:~1019KB), 2, v2 Lower Memory, Serial, None, Only Sketch, 115200″
In file included from C:\Program Files (x86)\Arduino\libraries\Blynk\src/Blynk/BlynkApi.h:37,
from C:\Program Files (x86)\Arduino\libraries\Blynk\src/BlynkApiArduino.h:14,
from C:\Program Files (x86)\Arduino\libraries\Blynk\src/BlynkSimpleEsp8266.h:24,
from C:\Users\islim\OneDrive – Muğla Sıtkı Koçman Üniversitesi\Masaüstü\ISLIM_KANARYA_CALAGAN_gp_code_file and thesis\ISLIM_KANARYA_CALAGAN_gp_code_file_1\ISLIM_KANARYA_CALAGAN_gp_code_file_1.ino:3:
C:\Program Files (x86)\Arduino\libraries\Blynk\src/Blynk/BlynkTimer.h:36:21: error: redefinition of ‘class BlynkTimer’
36 | #define SimpleTimer BlynkTimer
| ^~~~~~~~~~
C:\Program Files (x86)\Arduino\libraries\SimpleTimer/SimpleTimer.h:10:7: note: in expansion of macro ‘SimpleTimer’
10 | class SimpleTimer {
| ^~~~~~~~~~~
C:\Program Files (x86)\Arduino\libraries\Blynk\src/Blynk/BlynkTimer.h:36:21: note: previous definition of ‘class BlynkTimer’
36 | #define SimpleTimer BlynkTimer
| ^~~~~~~~~~
C:\Program Files (x86)\Arduino\libraries\Blynk\src/Blynk/BlynkTimer.h:41:7: note: in expansion of macro ‘SimpleTimer’
41 | class SimpleTimer {
| ^~~~~~~~~~~
“SimpleTimer.h” için birden fazla library bulundu
Kullanılıyor: C:\Program Files (x86)\Arduino\libraries\SimpleTimer
Kullanılmıyor: C:\Program Files (x86)\Arduino\libraries\SimpleTimer-master
“Adafruit_Sensor.h” için birden fazla library bulundu
Kullanılıyor: C:\Program Files (x86)\Arduino\libraries\Adafruit_Sensor-master
Kullanılmıyor: C:\Program Files (x86)\Arduino\libraries\Adafruit_Unified_Sensor
exit status 1
NodeMCU 1.0 (ESP-12E Module) kartı için derleme hatası.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
#define kirmizioto 8
#define sarioto 9
#define yesiloto 10
#define kirmiziyaya 11
#define yesilyaya 12
void setup()
{
pinMode(kirmizioto, OUTPUT);
pinMode(sarioto, OUTPUT);
pinMode(yesiloto, OUTPUT);
pinMode(kirmiziyaya, OUTPUT);
pinMode(yesilyaya, OUTPUT);
}
void loop()
{
digitalWrite(kirmizioto, HIGH);
digitalWrite(sarioto, LOW);
digitalWrite(yesiloto, LOW);
digitalWrite(kirmiziyaya, LOW);
digitalWrite(yesilyaya, HİGH);
delay(5000);
digitalWrite(kirmizioto, LOW);
digitalWrite(sarioto, HİGH);
digitalWrite(yesiloto, LOW);
digitalWrite(kirmiziyaya, HİGH);
digitalWrite(yesilyaya, LOW);
delay(1000);
digitalWrite(kirmizioto, LOW);
digitalWrite(sarioto, LOW);
digitalWrite(yesiloto, HİGH);
digitalWrite(kirmiziyaya, HİGH);
digitalWrite(yesilyaya, LOW);
delay(3000);
}
ARKADAŞLAR BURDA Kİ HATAM NEDİR
Arduino:1.8.15 (Windows Store 1.8.49.0) (Windows 10), Kart:”Arduino Uno”
Taslak adının değiştirilmesi gerekiyordu.
Eskiz isimleri bir harf veya rakamla başlamalı, ardından harf
sayılar, kısa çizgiler, noktalar ve alt çizgiler izlemeli. Maksimum uzunluk 63 karakterdir.
Çalışmanız programın 2690 bayt (8 %) saklama alanını kullandı. Maksimum 32256 bayt.
Global değişkenler belleğin 28 byte kadarını (1%) kullanıyor. Yerel değişkenler için 2020 byte yer kalıyor. En fazla 2048 byte kullanılabilir.
avrdude: ser_open(): can’t open device “\\.\COM16”: Sistem belirtilen dosyay� bulam�yor.
Problem uploading to board. See https://support.arduino.cc/hc/en-us/sections/360003198300 for suggestions.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
Arduino:1.8.16 (Windows 10), Kart:”Arduino Uno”
sketch_oct18d:3:7: error: stray ‘\305’ in program
sketch_oct18d:3:8: error: stray ‘\237’ in program
sketch_oct18d:8:14: error: stray ‘\305’ in program
sketch_oct18d:8:15: error: stray ‘\237’ in program
sketch_oct18d:17:20: error: stray ‘\305’ in program
sketch_oct18d:17:21: error: stray ‘\237’ in program
sketch_oct18d:22:20: error: stray ‘\305’ in program
sketch_oct18d:22:21: error: stray ‘\237’ in program
sketch_oct18d:27:20: error: stray ‘\305’ in program
sketch_oct18d:27:21: error: stray ‘\237’ in program
sketch_oct18d:32:20: error: stray ‘\305’ in program
sketch_oct18d:32:21: error: stray ‘\237’ in program
sketch_oct18d:3:9: error: expected initializer before ‘ilPin’
C:\Users\06ern\OneDrive\Masaüstü\arduino programı\sketch_oct18d\sketch_oct18d.ino: In function ‘void setup()’:
sketch_oct18d:8:12: error: ‘ye’ was not declared in this scope
C:\Users\06ern\OneDrive\Masaüstü\arduino programı\sketch_oct18d\sketch_oct18d.ino: In function ‘void loop()’:
sketch_oct18d:17:18: error: ‘ye’ was not declared in this scope
sketch_oct18d:20:20: error: expected ‘;’ before ‘{‘ token
sketch_oct18d:25:3: error: ‘else’ without a previous ‘if’
sketch_oct18d:25:20: error: expected ‘;’ before ‘{‘ token
sketch_oct18d:30:3: error: ‘else’ without a previous ‘if’
sketch_oct18d:32:18: error: ‘ye’ was not declared in this scope
exit status 1
stray ‘\305’ in program
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
arkadaşlar ben seri haberleşmeye herhangi birşey yazdırmaya çalışıyorum ama x⸮x⸮x⸮x bu şekilde xx? gibi şekiller veriyor hatam ne?
Arduino IDE de DFPlayer mini mp3 çalar için olan tüm kütüphanelerde hata alıyorum. Bir alt sürümü denedim kütüphanelerin tüm sürümlerini denedim.Kütüphane dosya konularını kontrol ettim sorun yok. Arduino15 ve tüm arduino dosyalarını tamamen temizledin tekrar yükledim. Güvenlik duvarını kapattım ne yaparsam yapayım tüm DFPlayer kütüphanelerinde hata aldım. bunun çözümü ne olabilir?
esp32 aldım doğru kom ve port seçtiğimden de eminim ama şöyle Compilation error: exit status 255 diye bir hata veriyor bulamadım çözümünü internette yardımcı olur musun.