Merhabalar. Arduino kullanarak yaptığımız robot projelerimizin vazgeçilmez parçalarından birisi motor sürücüler. Bu yazımda sizlere belki bu tip projelerde en popüler seçenek olan L298N motor sürücü kartının kullanımını detaylı olarak anlatacağım.
L298N Motor Sürücü Nedir?
L298 entegresi, TTL seviyesi (5V ve 0V) lojik sinyalleri ile çalışabilen ve röle, solenoid, motor gibi indüktif yükler ile kullanılabilecek, 46V gerilimde ve toplamda 4A’e kadar akım verebilen bir sürücüdür. Arduino motor kartlarında en sık karşımıza çıkan sürümü L298N olsa da, L298HN ve L298P gibi farklı kılıflarda da mevcuttur. L298’in tüm sürümleri aynı işleve sahiptir, yalnızca farklı kılıflarda sunulmuştur.


L298N sürücü DC motor sürme uygulamalarında genellikle H-köprüsü konfigürasyonunda kullanılır. Toplamda 4 adet anahtarlama elemanından oluşan H-köprüsü devresi aşağıdaki gibidir:

S1 ve S4 anahtarları aynı anda açılarak motorun üzerinden geçen akım, S2 ve S3 anahtarları açıldığında motorun üzerinden tam tersi yöne dönecek; bu sayede motorun dönüş yönünü kolayca kontrol etmemize olanak sağlayacaktır. H-köprüsü ve transistörler ile ilgili daha detaylı bilgi almak isterseniz Transistör Nedir? Ne İşe Yarar? Transistör Çeşitleri yazıma da başvurabilirsiniz.
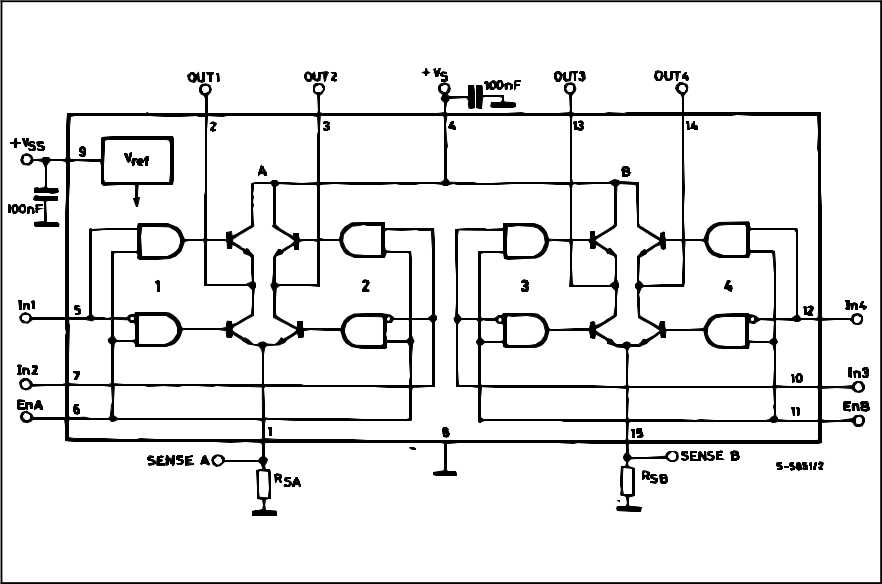
Entegrenin blok diyagramından da görebileceğimiz üzere L298 sürücünün üzerinde In1, In2, In3, In4, EnA ve EnB girişleri mevcuttur. L298 sürücü iki adet motor sürebilme yeteneğine sahip olduğundan In1, In2 ve EnA girişlerini bir kanal (örn. robotumuzun sağ motoru), In3, In4 ve EnB girişlerini ise diğer kanalı (örn. robotumuzun sol motoru) kontrol etmek için kullanabiliriz.
L298N ile Arduino Bağlantısı ve Kullanımı
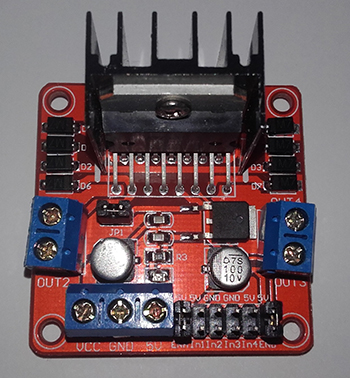
L298N motor sürücü kartımızı, hız kontrolüne de ihtiyacımız varsa kanal başına 3’er pin bağlantı ile Arduino’muza bağlayabiliriz. Eğer hız kontrolü yapmayacaksak, her bir kanal için enable pinlerini (EnA ve EnB) +5V’a, yani lojik 1 sinyaline bağlayabiliriz. Bazı L298N kartlarında bu bağlantının kolay bir şekilde yapılabilmesi için 2 adet jumper bulunur.
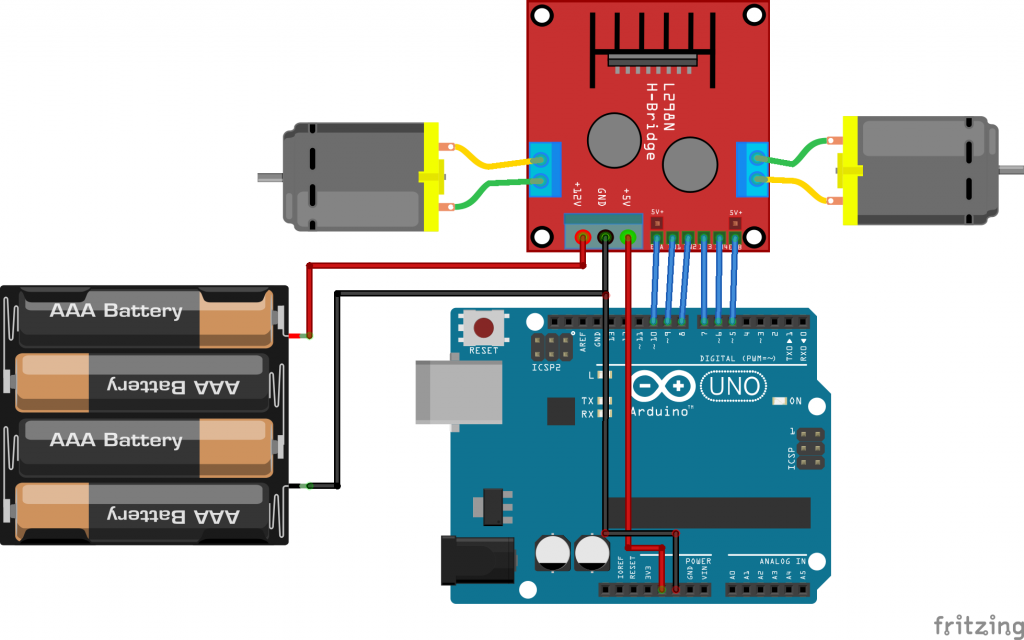
Hız kontrolü gerektiren uygulamamızda L298 ile Arduino bağlantımızı yaparken enable pinlerini Arduino’nun PWM çıkış sağlayabilen pinlerine (Arduino UNO modeli için 3, 5, 6, 9, 10, 11 numaralı dijital pinler – yanındaki ~ işaretinden de kolayca anlayabiliriz) bağlamamız gereklidir. Bunun yanı sıra, motorların güç beslemesi için L298 sürücü kartları üzerinde genellikle VIN veya +12V yazılı girişler bulunmaktadır. Bu bağlantıya motorların çalışabilmesi için robotumuzun ana güç kaynağının (4’lü, 6’lı veya 8’li pil yuvası, Li-Po batarya vs.) + ucu, GND bağlantısına da yine bu güç kaynağının – ucu bağlanmalıdır.
Bazı L298N kartları üzerinde Arduino kartımızı doğrudan besleyebilmemiz için 5V regülatör devresi de mevcuttur. Genellikle kart üzerinde +5V ile gösterilen bu çıkışı Arduino kartımızın 5V pinine bağlayarak kullanabiliriz.
L298N motor sürücü ve Arduino kullanılarak yapılmış örnek robot projeleri için sitemizde bulunan Arduino ile Bluetooth Kontrollü Araç Yapımı ve Çizgi İzleyen Robot Yapımı – 7 Dk’da Öğren! yazılarını da incelemenizi tavsiye ederiz.







Bağlantı şemasının yanlış olduğunu düşünüyorum. L298N’de regüle adilmiş 5V çıkışı, arduino’nun 5V çıkışına bağlanmış. Arduino üzerindeki Vin girişine bağlanıp arduino beslemesi yapılabilir ya da boş bırakılmadır.
Arduino’vin girişi 6.5V ister. Voltajı 5V ile regule eder. Oysa 5V çıkışa 5V bağlanırsa direkt beslenmiş olur. Hata yok.
Furkan Uzun doğru yazmış.L298N kartından çıkan 5v arduinonun Vin girişine bağlanmalıydı.Bu arduinonun harici besleme girişidir.Arduino üzerindeki 5v ise arduinodan alınacak 5v dur.Çizim hatalı.
Ben motor sürücüye ilk olarak 6 volt bağladım fakat çalışmayınca 12 volt 1.3 amper akü bağladım hala çalışmıyor. Işıklar yanıyor ama motorlad hareket etmiyo. Güç kaynağı ile 12 v verince çalışıyor. Ne yapabilirim?
Şuradaki bloga bakarak L298N motor sürücüsündeki hatayı bulabilirsiniz.
Hic birini yapmayin direk 9 v girisine pil takin olsun bitsin be 😃😃😝