Merhaba arkadaşlar. Bugün sizlerle Arduino UNO kullanarak DC motor hız ve yön kontrolü yapacağız.
Gerekli malzemeler:
- Arduino UNO
- Breadboard
- L293D motor sürücü entegresi
- 1 kΩ direnç
- 10 kΩ potansiyometre
- 1 adet push buton
- 9V DC motor
- İki ucu erkek jumper kablo
- 9V DC adaptör veya 9V pil
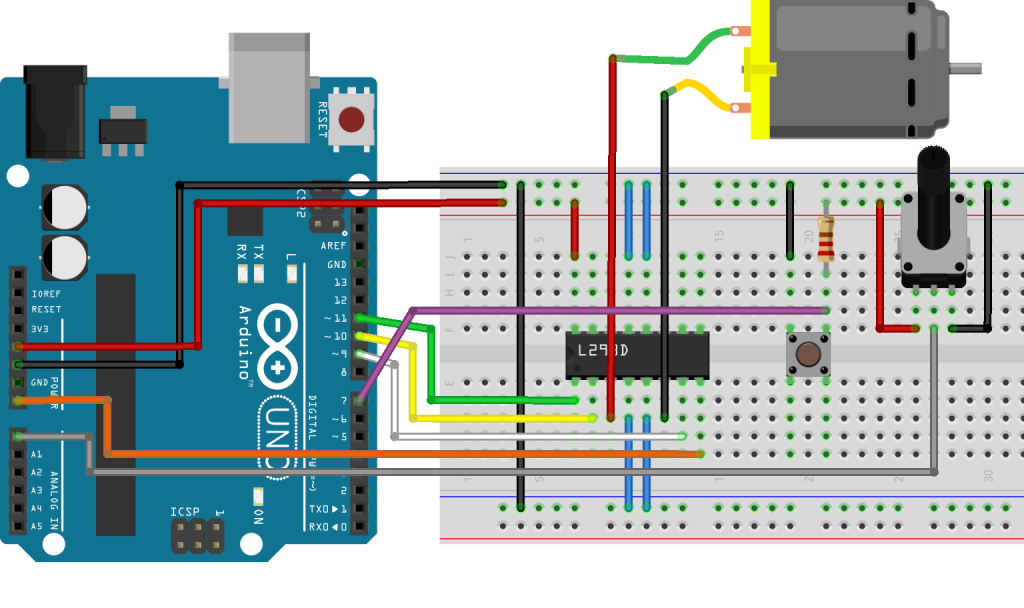
Daha önceki DC motor uygulamamızda, 1 adet transistör kullanarak motorumuzla sadece hız kontrolü yapmıştık. Fakat yön kontrolü yapabilmemiz için bir motor sürücü entegresine ihtiyacımız var. L293D entegresi, 2 adet DC motor veya 1 adet step motor sürmek için kullanılan oldukça popüler bir entegredir.

Bu entegrenin input 1 ve input 2 girişleri, motorun döneceği yönü; enable pini ise hangi çıkışların aktif olacağını kontrol ediyor. Enable pinine uygulayacağımız PWM sinyal, motorların hızını değiştirmemize olanak sağlıyor.
Bu entegreyi kullanarak hazırladığımız devre şemamız:
Kodumuz:
int enablePin = 11;
int in1Pin = 10;
int in2Pin = 9;
int butonPin = 7;
int potPin = 0;
void setup()
{
pinMode(in1Pin, OUTPUT);
pinMode(in2Pin, OUTPUT);
pinMode(enablePin, OUTPUT);
pinMode(butonPin, INPUT);
}
void loop()
{
int hiz = analogRead(potPin) / 4;
boolean ters = digitalRead(butonPin);
motorCalistir(hiz, ters);
}
void motorCalistir(int hiz, boolean ters)
{
analogWrite(enablePin, hiz);
digitalWrite(in1Pin, ! ters);
digitalWrite(in2Pin, ters);
}
Entegremizin enable bacağına analogWrite() fonksiyonu sayesinde PWM sinyal göndererek hız kontrolü yapmış oluyoruz. Butona bastığımızda input 1 ve input 2 pinlerine giden sinyaller tersine çevriliyor. Böylece motorun döndüğü yön ters çevrilmiş oluyor.







Şema resmi çıkmıyor ve bu konularla ilgili video çekerseniz çok daha iyi olur
Adnan Bey, ilginiz için teşekkür ederiz. Videolarımızı YouTube kanalımızdan veya blog’umuzun İzle bölümünden takip edebilirsiniz.
Bu entegrenin beslemesini arduino üzerinden değil de mesela bir aküden verebiliyor muyuz? sadece yön kontrolü için ULN 2803 kullanmaktan farkı ne?
Sürücünüzün çalışabildiği gerilim aralığında olduğu sürece herhangi bir DC gerilim kaynağı (pil, akü, adaptör vs.) kullanabilirsiniz. ULN2803 entegresi, yanlızca darlington transistörlerden oluşmaktadır, L293D ise bir H-köprüsü entegresidir. Yani ULN2803 entegresini çoklu transistör gibi kullanabilirsiniz, L293D ise hız kontrol ve yön değiştirme uçları dışarı verildiğinden daha kolay bir kullanıma sahiptir.
Merhaba
Ben bi proje yapacagim
Arduino katrtla
İleri geri devirli bir motor olacak zaman ayarli ilk ilere calistiginda ortalama 20 dk gibi zamanla otomatik baslayacak durdurma sivic yardimiyla manuel olacak 20 dk kadar bekleyip geri calisacak yine ayni bi 20 dakika kadar calisip durdurma sivic yardimiyla sonlu olacak sonra tekrar 20 dakika bekleyim ileri devam edecek bu sekilde dongulu ayarlaya bilecegim bir kart .. oneri bekliyorum İyi CALİSMALAR simdiden yatdiminiz icin tesekkur ederim….
merhaba ünlem işareti ne işe yarıyor?
Şurada ki : digitalWrite(in1Pin, ! ters);
Merhabalar, ünlem işareti gelen değerin tersinin alınması için kullanılmaktadır. Yani 0 geliyorsa 1, 1 geliyorsa 0.
PWM ile DC motor sürmede en dikkat edilmesi gerek konulardan birtanesi PWM frekansı. Fakat baktığım hiçbir Türkçe kaynakta Arduino’nun PWM frekansını ayarlamayı görmedim. Lütfen bu konuda da bilgi verin.
Arduino üzerindeki PWM çıkışlarının frekanslarını değiştirmek için timer’lar ile oynamak gerekeceğinden, bu yazımızın kapsamını çok aşacağını düşünmekteyim. İlginiz için teşekkür ederiz 🙂
merhaba ben bu devreyü kurdum ama sadece motordan buzzer sesi geliyo yardımcı olusanız sevinirim .teşekkürler
Elektrik akımı muhtemelen yetmiyor. Daha fazla voltaj verin
motorun hız bilgisini devir sayısı cinsinden gözlemlemek için ne yapılması gerekir.
Bu istediğiniz bilgileri elde edebilmeniz için enkoderli motor kullanmanız gereklidir.
merhaba hocam ikinci motoru bağlamak için kodlar nasıl olur??
Farklı bir motor çalıştırma fonksiyonu (örneğin motorSolCalistir veya motorSagCalistir) oluşturarak bu motorun bağlı olduğu yön kontrol pinlerini (eğer bu dersteki sürücüyü kullanıyorsanız L293D entegresinin 10 ve 15 yön kontrol ve 9 numaralı enable bağlantıları) bu fonksiyonda tanımlayarak ikinci motorunuzu kontrol edebilirsiniz.
burada kullanılan dc motor fırçalı mı fırçasız mı? hangisini kullanacağım fark eder mi? şimdiden teşekkürler.
Bu uygulamada kullanılan motor fırçalı DC motordur. Fırçasız DC motorları çalıştırmak için ESC (electronic speed controller) isimli özel sürücü devreler bulunmaktadır. ESC’lerin sinyal bağlantısı, servo motorlar ile tamamen aynıdır. Fırçasız motorlar ile ilgili çalışma yapacaksanız Servo Motor Kontrolü uygulamamızı inceleyebilirsiniz.
hocam peki fırçasız motorlarda yön degistirmek icin kablolarin yerini degistirmekten baska bi yol varmi. fırçasız motorla araba yapicam ama geri nasil alicam bilemedim
Kullandığınız sürücüde yön değiştirme özelliği varsa (reversible ESC diye geçer) fırçasız motorunuzu her iki yönde de döndürebilirsiniz.
kullanılan kontrol sistemi nedir? pı pıd
Merhabalar, burada anlatılan sistem oldukça basittir: Doğrudan istenilen hız değeri PWM olarak sürücünün “enable” pinine verilir ve böylelikle oransal (proportional – PID’nin P kısmı) olarak hız kontrolü yapılmış olur. Yani kısa cevap P kontrol 🙂
redüktörlü 12 V dc motor içinde devre elamanlar aynen bu şekildemidir ?
Evet aynıdır. Kullanacağınız redüktörlü motor daha fazla akım çekebileceğinden daha yüksek akım kapasitesine sahip bir sürücü tercih edebilirsiniz.
merhabalar iyi çalışmalar hocam
bu uygulamayı aynı şekilde 4 farklı dc motora aynı devre de uygulamak mümkün müdür bu konuda yardımcı olabilirseniz sevinirim teşekkür ederim
Evet mümkündür. Her bir L293D motor sürücüsü 2 adet motoru desteklediğinden 2 tane bu sürücüden kullanmanız gerekecektir. Yön kontrol pinleri ve PWM hız pinlerini bağlayarak kullanabilirsiniz. Unutmayın ki her bir motor için Arduino’ya 3 adet bağlantı yapmanız gerekmekte. Yani toplamda 12 adet pin kullanmış olacaksınız.
arduino ile büyük boy sanayi tipi 1.5 kw motor kontrolü yapılabilirmi? nasıl bi shield kullanmak,ne yapmak gerekir?
Bahsettiğiniz tipteki motorları sürmek için “inverter” diye tabir edilen sürücüler kullanılmaktadır. Bu tip sürücüler, genellikle endüstriyel kullanım amaçlı olduğundan, PLC gibi cihazlar ile haberleşecek şekilde tasarlanır (PROFIBUS, PROFINET, CCLink vs). Bazı sürücülerin bu tip haberleşme yeteneği olmamakta, bunun yerine PLC’nin çıkışına doğrudan bağlanacak şekilde 24V gerilim ile çalışan girişleri bulunmaktadır. Bu tipte bir sürücünüz var ise, buradaki ürüne benzer kartlar ile Arduino’nuzun 5V çıkışını 24V’a yükselterek sürücüyü kullanabilirsiniz.
hocam çalışma prensibini anlatırmısın
Uygulamada kullanılan L293D entergresi, H köprüsü dediğimiz konfigürasyonda dizilmiş transistör dizilerine sahiptir. H köprüsünü inceleyecek olursak, akımın motor üzerinden bir yönde akması için çapraz iki transistörün iletime girmesi gerektiğini görmekteyiz. Aynı şekilde akımın yönünü tersine çevirmek için ise diğer çapraz transistörlerin aktif olması gerekmektedir. L293D entegresi, her motorun yön kontrolü için 2 adet girişe sahiptir. Böylelikle kolay bir şekilde motorun dönüş yönünü tersine çevirebilir, ya da fren yaptırabiliriz. H köprüsünü daha iyi anlamak için buradaki videoyu izleyebilirsiniz.
Merhaba ben bir şey merak ettim acaba bu projede butona her basıldığında mı yön değişiyor yoksa sadece bir kerelik bir şey mi? O buton kısmında neden if(button==HIGH) ya da if(button==LOW) kullanmadık merak ettim.
kerem bey devrenin yapılışını anlatan bir video yada fotogram var mı yönlendirirmisiniz
Merhaba,
Öncelikle bu güzel çalışma için teşekkürler.
Devreye radio transmitter ekleyerek uzaktan kumanda ile kullanmaya çalışıyorum. Motor dönerken radyo alıcısı çalışmıyor. Motor pinlerinden birini boşa düşürünce yeniden çalışmaya başlıyor. Nedeni ne olabilir? Bu sorunu nasıl aşarım.
Teşekkürler.
Motorunuzun çalışırken oluşturduğu parazit kablosuz alıcı devrenizi etkiliyor olabilir. Motor ile alıcı arasındaki mesafeyi arttırmayı veya daha kaliteli bir motor sürücü kullanmayı deneyebilirsiniz.
Merhaba çalışmanız için teşekkürler.Konuyla bağlantılı olarak sorum olacaktı. http://www.robotistan.com/12v-25mm-10200-rpm-enkoderli-yuksek-guclu-reduktorsuz-dc-motor
Encoderli motor bulunmaktadır.Bu motoru lm298 motor sürücü devresi ile sürebilir miyim?Arduino ile encoderli motor sürmek için ayrı pwm kodlarımı kullanılır?Yoksa aynı mantık ile kodlama yapabilir miyim?Teşekkürler.
Merhabalar. Linkini vermiş olduğunuz motor, zorlanma durumunda ürün açıklamasında belirtildiği üzere 5.6A akım çekmektedir. L298N motor sürücü ise kanal başına 2A akım verebildiğinden yetersiz kalabilir. Enkoderli motor olması, yalnızca konum kontrolü uygulamalarında işinize yarayacaktır, onun haricinde standart bir DC motor gibi sürebilirsiniz. Motorun + ve – uçlarından sürücüye bağlantı yapmanız yeterli olacaktır.
merhabalar motorun tork ve dönüş hızını gösteren bir aurdino projesi varmıdır? bu tork ve hız değerlerini de bir lcd panel üzerinden görebilirmiyiz? bu proje için yardım edermisiniz veya yol gösterirmisiniz?
Motordan hız ve konum bilgisi okuyabilmeniz için enkoderli motor kullanmanız gereklidir. Örnek olarak bu ürünü inceleyebilirsiniz.
merhaba ben bir proje yapıyorum butona basarak yön değişeceğine , butona basınca dursa olur mu. olursa neleri değiştirmem gerek? (butonla start/stop yapma)
DC motorda zaman kontrolünü nasıl sağlayabilirim.? yani dc motorun belli bir süre (saniye cinsinden) Çalışıp durması söz konusu olabilir mi?
Tabi ki. Motoru çalıştıracak ve daha sonra durduracak komutların arasına delay koymanız yeterli.
merhaba ben devreyi yaptım çalıştı hızı ayarlıyorum fakat butona bastığımda terse dönmüyor hiç bir şey olmuyor şemaya göre kesinlikle doğru 4 kere söküp tekrar yaptım LÜTFEN YARDIM EDİN
Devredeki butonun bağlantısını yaparken yan yana iki bacağını kullanmayı deneyin. Sanırım devre şeması hatalı. Tüm yazıları kontrol etmemiz gerekecek 🙂
iyi günler, aynı sorunu güncellenmiş şemada hala yaşıyorum. yön kontrolümsağlayamıyorum ve bazı durumlarda motor çalışmıyor. çalıştığı zamanda butonla başlat durdur dışında yön kontrolü yapamıyorum. bu sorunu nasıl çözebilirim?
L293D motor sürücü yerine DRV8833 kullanılabilir mi denedim ama çalıştıramadım. öneriniz var mı?
Tabi ki kullanılabilir. Buradan datasheet‘ini inceleyerek gerekli bağlantıları yapabilirsiniz.
BU SİSTEMİ L298N SÜRÜCÜDE NASIL UYGULAYABİLRİM YARDIMCI OLURMUSUNUZ.
TMM BULDUM TŞK EDERİM
merhaba öncelikle verilen bilgiler için eşekkür ederim.küçük bir cam sileceği projesi yapmam lazım.bu yazınızı incelediğimde yapmayı düşündüğüm sisteme uyuyor.yeni sizden arduino uno seti aldim.ama içerisinde l293d entegresi ve 1k direnç yok.ve şu an sitenizde de stokta kalmadığını ördüm en kısa zamanda malzemeleri temin etmem gerekiyor.ne zaman bu ürünlere ulaşabilirim.ya da yerine kullanabileceğim farklı malzemeler var mıdır?
Üzerinde 2 adet L293D sürücü bulunan Arduino Motor Sürücü Shield alabilirsiniz. Hem bağlantılarınız da daha kolay olacaktır.
Fırçasız motoru bu devre ile joyistick ile kontrol edebiliriz degilmi
Bu dersteki anlatım fırçalı tipte DC motolar ile kullanılabilir. Fırçasız DC motor kontrolü için bir motor sürücüye (ESC) ihtiyacınız olacaktır. Motor sürücünün bağlantısı ise servo bağlantısı ile aynı olduğundan Arduino Dersleri 13: Servo Motor Kontrolü dersimizdeki yönergeleri kullanabilirsiniz.
Teşekkürler Kerem hocam elinize sağlık
Meraba L293B motor sürücüyü bu kodlarla kullanabilirmiyim kütüphane gereklimi
L293B entegresi, bu devrede kullanılan L293D ile birebir pin uyumludur. Farkları sağlayabilecekleri akım miktarı ve flyback diyotlarıdır. Sağlayabileceği akım yettiği sürece sorunsuzca kullanabilirsiniz.
yukarıdaki uygulamayı yaptım ama
” Çalışmanız programın 1194 bayt (3 %) saklama alanını kullandı. Maksimum 32256 bayt.
Global değişkenler belleğin 9 byte kadarını (0%) kullanıyor. Yerel değişkenler için 2039 byte yer kalıyor. En fazla 2048 byte kullanılabilir. ” böyle bir hata aldım.ne yapmam gerekiyor?Yardımcı olabilirmisiniz?
Hata değil ki bu kodları başarılı bir şekilde karta aktardığını gösteriyor. Arduinonun belleğinde kullanılan alan yazılı orada
s.a ustam ben uzaktan kumandalı arabadaki dc motorları kullanarak araba yapmak istiyorum bunun için
arduino uno, dc motor sürücü kartı, 9v pil(arduino için), hc-06 bluetooth modülü ve android uygulaması olan blynk programını kullanarak yapmak istiyorum
size sorum istediğimi elde edebilirmiyim programdaki joystick ile motorun hızını kontrol edebilirmiyim.
Mümkündür. Aşağıdaki yazılarımızı inceleyebilirsiniz:
HC05 ve HC06 Bluetooth Seri Modülleri Kullanımı
Arduino Dersleri 17: HC-05 Bluetooth Modülü Kullanımı
Öncelikle selamun aleyküm kolay gelsin , arkadaşlarla takıldığımız bir konu var yardımcı olursanız çok seviniriz .
iki adet dc motor kullanılarak pottan gelen değere göre birinin hızlanıp diğerinin aynı oranda yavaşlamasını sağlayan programı yazınız .
yani ortalama 127 gibi bi değerde ikisi de aynı hızda motor2 255 yani max hızda çalışırken motor1 in durması gerekiyor ayrıca mesela pottan 150 gibi bir değer gelirse motor2 150 de , motor1 in ise buna oranla 104 gibi bir değerde çalışması gerekiyor bunun için yardımcı olabilir misiniz
Gelen veriyi
motor_hizgibi bir değişkende tutun.motor1 = motor_hizvemotor2 = 255 - motor_hizyazdığınızda istediğinizi elde edebilirsiniz.devreyi kurdum fakat motor dönmüyor 8200 coreless motor kullanıyorum yardımcı olurmusunuz etkileşim sıfır bide turunca kablo yerine motorun + ucunu bağladım
820 coreless
Şemadaki turuncu kablo motorun besleme gerilimidir. Motorun + ucunu bağladığınız takdirde çalışmayacaktır.
kerem bey. Tek bir arduino uno ile ile rfid kullanarak kayan kapı yapmak istiyoruz. CD romu söküp içindeki mekanizmayı çıkardık. cd takılan yeri ileri geri haraket ettirerek kapıymış gibi kullanmayı planladık. bunun için cd rom motorunu sağa ve sola döndürmek içinL293D mi kullanmalıyız yoksa dc motor sürücü devresimi. iki elemanıda tek bi arduino uno ile çalıştıra bilirmiyiz. yani butonu kaldıracağız kartı okutunca kapı açılacak tekrar okutunca kapı kapanacak. tabi dc motor sürücü kodlarının içerisine rfid kodlarını ekleye bilirmiyiz ondanda pek emin değilim.
L293D entegresi zaten motor sürmek için kullanılan bir H-köprüsü entegresidir. Arduino UNO bahsettiğiniz proje için yeterli pin sayısına sahiptir. Kod için ise Arduino Dersleri 18: RC522 RFID Modül Kullanımı yazımızı inceleyebilirsiniz. LED yakıp söndürme yerine bu derste anlatılan motor sürme kısmını entegre edebilmeniz mümkündür.
kerem bey bu uygulamayı 2DC motora uygulayıp buton olmadan sadece potansiyometre ile sağ ve sol yönlere çevirerek motorların hızlarını kontrol etmek mümkünmüdür ?
kodlarda ne gibi değişiklikler yapmamız gerekiyor?
Potansiyometreden ölçeceğiniz değer 0-1023 arasında değişecektir. Bu değeri 0-511 ve 512-1023 olacak şekilde iki kısma ayırarak bu farklı aralıkların motoru farklı yönde döndürmesini sağlayabilirsiniz. Hız kontrolü için gerekli 0-255 arasındaki değeri de map() komutu ile elde edebilirsiniz. Yani bir if yapısı oluşturup bu if ile motorların döneceği yönü belirleyecek, if’in içerisinde ise gelen değeri hız kontrolü için ölçekleyerek kullanacaksınız.
Merhaba kolay gelsin. 6 v 9000 rpm bir motor ( akulu araba motoru ) icin nasil bir surucu kari kullanabilirim. Kontrol arduino uzerinden kumandayla yapmayi dusunuyorum. 2 adet motor calisacak. Sag ve sol ileri ve geri. Tskler
Sürücü kartını belirleyecek parametre yalnızca motor gerilimi değildir. Akülü arabalarda kullanılan DC motorlar, yük altında yüksek akım çekebilmektedir. Genel olarak bir tahmin yürütmek gerekirse en azı 10A civarı akım sağlayabilecek bir motor sürücü kullanmak mantıklı bir hareket olacaktır. Sürücü kartlarımızı buradan inceleyebilirsiniz.
turuncu kablo neden uno nun Vin girisine giriyo ben beslememı ordan yapacagım sıkıntı olurmu?
Turuncu kablo, motor besleme gerilimi olarak kullanılıyor. Ben Arduino’nun adaptör ile besleneceğini düşündüğüm için, adaptörden gelen gerilimi motoru beslemek için o şekilde bir bağlantı tercih ettim. Siz motor beslemesi olarak farklı bir kaynak kullanacaksanız sorun yoktur, yalnızca kullandığınız kaynağın GND veya – bağlantısını Arduino’nun GND pinlerinden birine bağlamayı unutmayınız.
Merhabalar, hc-05 modülü ve 4 adet redüktörlü dc motor 2 adet l298 kullanarak, bluetooth kontrollü araba yaptım, fakat devremdeki sıkıntı şu, telefon
ile ileri yada geri komutu verdiğimde sıkıntı yok, fakat ileri giderken geri yada geri giderken ileri komutu verdiğimde birden hc-05 in bağlantısı kesiliyor. Manuel olarak
tekrar bağlanabiliyorum, motoru ters yöne geçirirken özel bir teknik varmı ? Ters manyetik alan devreyemi etki ediyor? Sizin fikriniz nedir?
Merhabalar hocam http://www.robotistan.com/arduino-motor-surucu-shield-arduino-motor-driver-shield burada ki shield’e 4 dc motor bağlayıp küçük bir quadcopter yapmaya çalışacağım. Bluetooth modülü ve eksen/ivme sensörünü bu shield ile kullanabilirmiyim ? küçük birşey olacağı için fırçalı motor kullanmayacağım malum fiyatları pek uygun değil nasıl bir motor kullanmamı önerirsiniz 4 adet 600 devir 5v dc motor yeterli olurmu?
düzeltme: fırçasız motor kullanmayacağım olacaktı
Üzülerek belirtmem gerekir ki fırçalı motorlar drone’lar için tatmin edici performans gösterememektedir. Küçük boyutlardaki oyuncak quadcopterlerde fırçalı motor kullanılmaktadır, fakat bu oyuncaklar bahsettiğiniz motor sürücü shield kartının belki yarısı kadar ağırlığına sahiptir. Ayrıca 600 devir 5V motor da biraz fazla iyimser bir tercih. Mini drone’larda kullanılan “coreless” tipteki fırçalı motorlar yaklaşık olarak 50.000 devir çevirmektedir.
Merhabalar
DC motorlarda step motorda olduğu gibi adım sistemine yakın birşey yapılabilir mi yani bir araba yapsak x kadar git ve dur gibisinden bir kod mümkün mü?
DC motorlarda adım kontrolü yapmak için enkodere sahip bir DC motor kullanmanız gereklidir.
merhabalar;
Sadece yön kontrolü yapmak için enable bağlantıları hariç diğer bağlantıları aynı şekilde yaptım ama motorlar çalışmıyor. Motor uçlarının voltajını 0 olarak ölçüyorum. Entegreyi 8. bacağından harici olarak beslemeyi denedim ama olmadı. Arduıno bağlantılarını yapmadan sadece entegre üzerinden motorları sürebiliyorum. Yani entegrede herhangi bir bozulma olmadığını düşünüyorum. Fakat sisteme arduıno yu dahil ettiğim zaman motorlar yeterli akım çekmiyor. Sorun nerde olabilir sizce?
Enable bacaklarına herhangi bir sinyal yollamadığınız takdirde motorlar çalışmayacaktır. Entegreyi hangi kaynak ile besliyorsunuz acaba?
Entegrenin 8. Bacağından 12v dc besliyoruz. 16. Bacağından arduino bağlantısını yapıyoruz. Enable ucunu bağlamadan motoru döndürdük aslında topraklamayi eksik yapmışız.
maket ucak kanat kesme makinasi icin 4 tane nema14 step motor… motorun ikisi “Y” ekseni diger ikiside “Z” ekseninde calismasini istiyorum,
bunun yazilimi nasil olmali acaba..
kulandigim malzeme : 4 tane nema14 + cnc shield v3 + 4 tane A4988 sürücü ve arduino uno
Tesekkürler
Bu yazılımı inceleyebilirsiniz: https://github.com/grbl/grbl
Hocam iyi günler, yardımcı olursanız sevinirim.
Akıllı ev sistemi yapıyorum, hareket sensörler, gaz, yangın, ldr, bluetooth sensörüleri var. Bunların yanında 9V DC motor sürmek istiyorum, arduinoyu 12V ile beslemeye çalıştım. Sıkıntı şu, bukadar sensör ve motor var, bu arduinoyu nasıl besleyeceğim? “afroid motor shield” sürücüsüne, sadece 1 motor bağlasam o motor pininden max nekadar akım geçirebilirim? Ayrıca, L293D sürücüsü ile 9V motoru arduinodan bağımsız besleyebilirmiyim? Yardım lütfen. Teşekkürler.
Motor sürücüyü Arduino’dan bağımsız besleyebilirsiniz. Dikkat etmeniz gereken tek nokta, harici beslemenizin – ucu ile Arduino’nuzun GND bağlantılarının birleştirilmiş olmasıdır. Ayrıca bir adaptör veya pili Arduino üzerindeki güç konektöründen bağladığınızda, aynı bağlantı Vin pinine de taşınmış olacaktır. Buradan alacağınız bir bağlantı ile motoru beslemeniz mümkündür.
Merhaba bunun gibi projeleri yapmak icin hangi bolumu okumak gerekir
Bu projeleri yapmak için herhangi bir bölüm bitirmeye gerek yoktur 🙂 Fakat üniversitelerin mekatronik, elektronik/haberleşme, kontrol/otomasyon, elektrik, bilgisayar mühendislikleri gibi bölümlerini okursanız ve biraz merakınız varsa bu tip projelerle epey haşır neşir olacaksınız demektir.
Merhaba 2.4ghz kumanda ve alıcım var birde arduino uymlu 4kanal röle kart var 12v 6w motor kontrolü için hangi arduino önerirsiniz.
Arduino projelerinde kullanılan kodların tamamı ve kullanım şekilleri ile ilgili bilgiyi nerede bulabilirim.
Aldığım proje tamamen bu konuyu ilgilendirmekte. Yalnız dc motorun ucuna bağlı bir dc motor daha kullanacağım ve bu motoru generatör olarak kullanarak arduino ile yapacağım bağlantı sonucunda lcd de deviri görmek istiyorum. bana bu konuda fikir verebilir misiniz?
Motor devri ölçümü için enkoder kullanmanız gereklidir (örnek: https://www.robotistan.com/mikro-metal-motorlar-icin-12-cpr-manyetik-enkoder). Enkoder kullanmak istemezseniz, motorun miline bağlayacağınız daire şeklinde bir diskin tek kısmını bir cisim sensörünün (örnek: https://www.robotistan.com/cny70-kizilotesi-sensor-vishay) görebileceği miktarda keserek ve sensörün motorun her bir tam tur döndüğünde algılama yapması ile kendi çözümünüzü üretebilirsiniz.
merhaba bu sistemde enerjiyi usb den vermeyin demişsizin motor küçük bir DC motor olduğu için direk L298N Motor sürücü kullanarak bilgisayardan gereken gücü alabilirmiyiz?eğer alabiliyosak bağlantılar nasıl olacak yardımcı olursanız sevinirim
Besleme gerilimini Arduino üzerindeki Vin pinine bağlayabilirsiniz.
Merhaba bir sorum olacak ben redaktörlü dc motora yön vermem gerekiyor bu devreyi kullanabilir miyim ayrıca elimdeki motor 12v siz 9v yapmışsınız bir sıkıntı olur mu
Kullanabilirsiniz. Fakat dikkat etmeniz gereken konu, motorunuzun ne kadar akım çekeceğidir. Bu örnekte kullanılan L293D sürücü, 0.6A akım sağlayabilmektedir.
Merhaba hocam ldr ile dc motor kontrolunu nasil yapabilirim yardimci olurmusunuz
Potansiyometreyi söküp bu dersimizdeki LDR devresini doğrudan bağlayabilirsiniz:Arduino ile Işık Seviye Ölçümü. Yüklediğiniz kodu değiştirmenize gerek yoktur.
Bu dersteki kodu kullanip potansiyometre yerine ldr baglayacagim degilmi hocam? İlginiz icin tesekkurler
Ayni projeyi arduino nano ile yapabilirmiyim.surucu karti ve reduktorlu motor kullanip
Yapabilirsiniz.
Meraba devreyi kurdum ama motor dönmüyor sadece ses geliyor motordan
Harici besleme olarak 9V verdiniz mi? Motorun ses çıkartıp dönmemesi güç kaynağının yetmediğini gösterir.
Merhabalar iki motor için iki sürücü entegresine mi ihtiyacımız var? yoksa biri yeterli mi iki motor ile nasıl bir devre kurmamız gerekir?
Eğer her iki motoru da aynı hızda ve aynı yönde kontrol edecekseniz, motorların çektiği akımların toplamı sürücünüzün verebileceği akım miktarını aşmıyorsa kullanabilirsiniz. Motorları paralel bir şekilde sürücüye bağlayabilirsiniz.
Meraba iyi günler benim güneş takip sistemi yapicam DC motorlari 4 adet ldr kontrol edicem ile ama Arduino için fazla bir gerilim olucağı için arduino nasıl baglarim ldr ve dc motorları
Merhabalar. DC motorlar için motor sürücü devresine ihtiyacınız olacaktır, çizgi izleyen veya engelden kaçan robot yazılarımızdaki sürücüyü kullanarak 2 adet DC motor sürebilirsiniz. LDR’lerin bağlantısı için ise ışık seviyesi ölçümü dersimize göz atabilirsiniz. Teşekkürler.
Mehabalar ben L298N ile tek motor hız ve yön tahini yapmam gerekiyor.
L298N entegresini bu devreye göre bağladım. Sadece kodlardaki değişiklikler nasıl olur yardımcı olursanız sevinirim.
L298N’nin sadece IN1, IN2, ENA pinlerini sırasıyla bu örnekteki Arduino dijital pinler 9, 10 ve 11’e bağlamanız yeterli olacaktır.
merhabalar, 4 tane elimde çekirdeksiz motor var, bunları arduino pro miniyle kontrol edicem direk arduino ya bağlamam sorun olurmu yoksa hangi motor sürücüyü kullanmalıyım, elimde L298N var ama çok büyük ve ağır olduğu için onu kullanmak istemiyorum L293D işimi görürmü teşekkür ederim
Merhaba lar kolay gelsin ben birşey ogrenmem istiyorum cnc shild var elimde uno için freze tapmayı düşünüyorum a4988 ile dc motor kullanabilirmiyim sorun olurmu bunutesekkurler kolay gelsin
Teorik olarak step motor sürücüler iki adet DC motor sürücü gibi kullanılabilmektedir, fakat A4988’e iki adet DC motor bağlamanız durumunda iki motorun hızlarını birbirinden farklı olarak kontrol edemezsiniz.
Merhaba,
ben dc motorumun hızını ve yönünü butonlarla kontrol etmek istiyorum. hız için iki buton olsun. birine her bastığımda motor hızım 35 artsın. diğerine her bastığımda 35 azalsın. üçüncü butonla da her bastığımda yönleri değişsin istiyorum. nasıl yapabilirim?
Çok basit bir if yapısı ile butona her basıldığında analogWrite ile verdiğiniz değeri 35 arttırabilirsiniz. Yönünü tersine çevirmek için de bu örnekteki gibi bir boolean tipinde değişken tanımlayıp butona basıldığında yön pinlerinin tersini alabilirsiniz.
Örnek:
if(digitalRead(buton_1) == HIGH){
hiz = hiz + 35;
}
if(digitalRead(buton_2) == HIGH){
hiz = hiz – 35;
}
if(digitalRead(buton_3) == HIGH){
yon != yon;
}
merhabalar benim merak ettiğim bu devrenin akış semasını nasıl yapabiliriz blok şeması nasıldır bi bilginiz var mı ?
Akış şeması ve blok semaşı var mıdır ?
merhaba ben l298n ile 2 tane motorun hızını 2 tane pot ile birbirinden farklı şekilde hız ayarı yapmak istedimancak enA daki motorun hızını ayarlabiliyorken enB deki motorun hızını ayarlayamıyorum ya en sonn güçte çalışıyo yada hiç çalışmıyo potu çevirdiğimde kafayı yicem arduinoyu bıraktıracak bana bu sıkıntı nasıl çözebilirim
Merhabalar, kolay gelsin ben bir şey sormak istiyorum 12 volt fırçasız dc motor ve sensör kullanarak bir proje yapmak istiyorum. Sensörün önüne bir cisim geldiğinde motor çalışacak ve 10 saniye sonra motor duracak bunu yapabilmem için hangi sensörü kullanmalıyım ve fırçasız motor için l293d entegresi kullanmam esc kullanmamı gerektirir mi ve gerektirirse nasıl bağlamalıyım, ardino üzerinden zaman kontrolü yapabilirmiyim bununla ilgili herhangi bir dersiniz var mı? şimdiden teşekkürler
iyi günler bu motoru uzaktan kumanda ile kontrol etmek mümkün mü?
mümkünse kumanda ile sürmek için gerekli olan kodu yazabilir misiniz?
Merhaba. Elimde arduino mega ESP8266 birleşik modülü var. Pil kullanmamak için 12v DC motor kullanmak istiyorum. Bu motoru wifi ve rf olarak kumanda etmek istiyorum. Mümkün müdür? İyi çalışmalar.
arkadaşım yaptım ama motora voltaj gitmiyor şikayetçiyim
Ben motorun hızını ve yönünü 1’er butonla kontrol etmek istiyorum. 1.butona bastığımda motor ileri tekrar bastığımda geri dönmesini. 2. Butona bastığımda motorun hızı artsın kademeli olarak en son hıza ulaştığında kademeli olarak düşsün
Ben bir asansör yapıcamda bunu keypad le yapabilirmiyim ayrıca 9v pil takabilirmiyim
Merhaba hocam benim bir projem varda yardım edebilirmisiniz
İlk olarak malzemeler şunlar
L298n
Ln324
Arduıno uno
Dc motor
4 ldr
Gunes paneli
Potansiyometre
Hocam bunlarla ldr ile gunes yonune gore dc motorun donmesi gerekiyor üniversite bitirme proje mdir yardımcı olursanız şimdiden teşekkürler
arduino nanoyla L293D shieldını kullanabilir miyim ? motor kontrol etmek istiyorumda
L293D shield Arduino Uno için tasarlandığından Nano ile uyumlu değildir. Yazıdaki gibi L293D entegresi ile motorunuzu sürebilirsiniz veya L298 gibi farklı bir sürücü kullanabilirsiniz.
Merhabalar, ben sizden almış olduğum ürünler ile nextion ekran ve arduino uno klon kullanarak bir sistem yaptım yanlız takıldığım bir konu var ekrandan on off yapinca şerit led kismi role ile kontrol edilerek calisiyor yani bu kısımda sorun yok ama slider ile motor devir ayarını bir türlü yapamıyorum. Bir suru kod denedim ama bir türlü beceremedim. Bu konuda bilgi verebilme imkanınız varmı ?
Bütün ürünleri robotistandan satın aldım ilave olarakda sizi youtube kanalinizdan takip etmekteyim.
Sizden aldığım ürünler bunlar ;
1-Redüktörlü 12Vdc motorum :
https://www.robotistan.com/12v-35mm-100rpm-dc-motor
2-Sürücü kartım :
https://www.robotistan.com/12-40v-10a-motor-surucu-karti-40
3-Diğer sürücü kartım :
https://www.robotistan.com/l298n-voltaj-regulatorlu-cift-motor-surucu-karti
4-Diğer sürücü kartım :
https://www.robotistan.com/rf520-mosfet-surucu-karti
3 adet sürücü kartım var internetteki slider ile bahsi geçen örneklere göre 3 ceşit aldım hangisiyle olursa artık.
Ilgi ve bilgileriniz için şimdiden çok teşekkür ederim.
Hocam nextion dokunmatik ekrandaki slider’ ı potansiyometre gibi kullanıp arduino aracılığı ile de motor devir ayarını yapmak istiyorum. Deviri görsel olarak ayarlayacagım encodere gerek duymadım.
Merhaba…
Bir sorum olacak, yanıtlayabilirseniz çok sevinirim.
Motor sürücünün enable bacağı, hangi taraftaysa o taraftaki motoru çalıştırmak için kullanılıyor. Enable bacağına sinyal gitmeyince motor da çalışmıyor. Buraya kadar tamam. Anlayamadığım şey, enable bacağının PWM ile ilişkisi. Neden PWM sinyalini de enable bacağına gönderiyoruz? Motorun daha yavaş veya daha hızlı çalışması, motora gönderilen voltajla ilgili. Halbuki enable bacağının motora gönderilen voltaj ile bir ilgisi yok, motoru çalıştırıp çalıştırmayacağımızı kontrol ediyoruz enable bacağıyla. Zaten motoru da harici kaynaktan besliyoruz. Konuyu tam çözemedim. Bu konuda biraz bilgi verebilirseniz çok sevinirim. Teşekkürler.
iyi akşamlar aynı devrede potansiyometre yerine ntc sensörü kullanmam gerekiyor ve aynı breadboard üzerinde hem buton kontrollü dc motor çalıştırmam hem de ntc sensörüyle dc motor hızını kontrol etmem gerekiyor yardımcı olur musunuz
Merhaba,
İki motor biri 360 derece diğeri 10 ila 20 tur dönebilecek
Her iki motoruda iki ayrı pot. ile ileri geri kontrol edebileceğim. (hız kontrolünüde çoğaltıp azaltabileceğim 1 rpm ile 10 rpm aralığında bir hızla)
LCD ekran da motor derecelerini görebileceğim.
Bir proje yapmak istiyorum. Hangi malzemelerden başlamalıyım? Desteğiniz için şimdiden tşk ederim.
Merhaba, proje için teşekkürler. Lcd bağlayabilmek için kodda ne gibi bir değişiklik yapmamız gerekiyor?
Buradaki yazıya başvurabilirsiniz:
Arduino Dersleri 10: 16×2 LCD Ekran (Kurulum ve Programlama Rehberi)
Bu devreye LCD koya biliyirmuyuz acaba benimde Arduino devrem var bu tarz bir LCD koyup motorun dönüş hızını da görmem gerekiyor
12 Voltluk DC Motor Mosfetle kontrol edeceğim. Devreye enerji verilince Motor 30 saniye tam devirde , 30 saniye yarı devrinde çalıştırılacak. Bunun arduino yzılımı nasıl olur yardım ederseniz çok sevinirim
merhabalar max 35000 rpm çevirebilen 12v fırçasız bir motoru, arabanın devir saatinden aldığı bilgiye göre değişken devir verebilen bir potansiyometre yapmamız mümkünmü. hazır halde var ama bunu gaz pedalı konum sensörüne bağlıyorlar benim araçta bu yok . yardımcı olmanız mümkünmü