Herkese merhabalar, bir önceki yazımızda robotlardan ve temel parçalarından bahsetmiştik. Bu yazımızda ise robotun kontrol kartı ve sensörlerinden bahsedeceğim.
Sensör Nedir? Ne Demek? Ne İşe Yarar? Görevi
Robot projemizde ışık, sıcaklık, mesafe gibi fiziksel büyüklükleri elektrik sinyallerine dönüştürmek ve bu bilgileri işleyecek karar mekanizmaları kurabilmek için sensörleri kullanırız.
Sensör Teknolojisi Nedir?
Sensör veya sensörlerin birleştirilmesiyle çeşitli otomasyonlar ve akıllı projeler gerçekleştirilmektedir. Günümüzün popüler bir konusu olan Endüstri 4.0 gelişmiş sensör teknolojileriyle ortaya çıkmış ve gelişmeye devam etmektedir. Dolayısıyla, sensör teknolojileri çoğu projenin gelişimine önayak olan ve her gün daha çok önem kazanan bir kavramdır.
Sensör teknoljilerinin çoğalması ve gelişmesi hayatın her noktasını bir şekilde etkilediğinden ciddi önem taşımaktadır.
Sensör Nasıl Çalışır? Çalışma Prensibi Nedir?
Sensör çeşitlerinin detayına girmeden önce bu sensörlerin temel olarak iki tipte var olduklarını bilmemiz gerek: analog ve dijital.
Analog sensörler, algıladıkları fiziksel büyüklüğe orantılı olarak değişen bir akım veya gerilim çıktısı verirler. Bu tipte sensörleri dijital çalışan kontrol kartlarımıza bağlayabilmek için analog-dijital çeviriciler (ADC) kullanılır.
Analog-dijital çeviriciler mikrokontrolcüler içerisinde de yer alacağı gibi (örn. Arduino analog giriş pinleri), sayısının veya hassasiyetinin yetmemesi durumunda harici olarak da bağlanabilirler.
Popüler bir tek kart bilgisayar olan Raspberry Pi ise maalesef dahili olarak analog-dijital çeviriciye sahip değildir. Dolayısıyla analog girişe ihtiyaç duyduğumuzda harici bir entegre kullanmamız gerekecektir.
Dijital sensörler ise genellikle I2C, SPI, OneWire vb bir haberleşme protokolü aracılığıyla bilgisayar (mikroişlemci) ile konuşurlar.
Bunun yanı sıra, çoğu analog sensör bir op-amp ile birlikte kullanılarak belirli bir seviye üzerinde lojik 1 (genellikle 5V veya 3.3V) çıkışı verecek şekilde kullanılabilir. Böylelikle analog çıkışlı sensörler, Raspberry Pi gibi ADC’ye sahip olmayan kontrolcüler ile kullanılabilir.
Ayrıca sensörler aktif sensör ve pasif sensör olarak da ikiye ayrılırlar. Aktif sensörler, kendi sinyallerini ürettikten sonra bu sinyalin ortamdaki değişimini kontrol ederek algılama işlemini gerçekleştirirler.
Ultrasonik ve kızılötesi sensörler bu gruba dahildir. Pasif sensörler ise ortamdan aldıkları sinyalleri kontrol ederek algılama işlemini gerçekleştirirler.
LDR (ışığa duyarlı direnç), NTC/PTC (ısıya duyarlı dirençler), fototransistör (ışığa duyarlı transistör) bu gruba örnek olarak gösterilebilirler.
Sensör Çeşitleri:
Sensörler, giriş büyüklüklerine göre altıya ayrılırlar. Aşağıda bu sensör çeşitleri ve algılama özelliklerini inceleyebilirsiniz.
- Mekanik sensörler (Uzunluk, alan, miktar, kütlesel akış, kuvvet, tork, basınç, hız, ivme, pozisyon, ses dalga boyu ve yoğunluğu)
- Termal sensörler (Isı akışı ve sıcaklık)
- Elektriksel sensörler (Voltaj, akım, direnç, endüktans, kapasitans, dielektrik katsayısı, polarizasyon, elektrik alanı, frekans)
- Manyetik sensörler (Alan yoğunluğu, akı yoğunluğu, manyetik moment, geçirgenlik)
- Işıma sensörleri (Yoğunluk, dalga boyu, polarizasyon, faz, yansıtma, gönderme)
- Kimyasal sensörler (Yoğunlaşma, içerik, oksidasyon/redaksiyon, reaksiyon hızı, pH miktarı)
Bu sensör çeşitleri kendi içlerinde de farklı şekillerde bulunurlar. Robotlarda ve sistemlerde en yaygın kullanılan sensörleri sıralayıp, biraz daha yakından tanıyalım.
- Mesafe sensörleri (Ultrasonik, PIR, Kapasitif, Endüktif, Kızılötesi Optik…)
- Kuvvet/Ağırlık/Basınç sensörleri
- Eğim sensörleri (Flex, Lineer/Esnek Potansiyometre…)
- Manyetik sensörler (Hall effect, reed röle…)
- Sıcaklık/Nem/Su Seviyesi sensörleri (NTC,PTC, Yağmur Sensörü…)
- Ses sensörleri (Dinamik/Kapasitif/Şeritli/Kristal/Karbon Tozlu Mikrofon)
- Işık/renk sensörleri (LDR, RGB, UV, Fototransistör, Fotodiyot…)
Bu sensörlerden robotik sistemlerde en yaygın kullanılanlarından biraz bahsetmek istiyorum.
Arduino sensör çeşitleri :
Arduino ile beraber kullanılabilen pek çok sensör ve çeşidi bulunmaktadır. Bu sensörlerden bazıları şunlardır :
- Ultrasonik Ses Sensörü
- PIR Hareket Sensörü
- NTC/PTC Sensörleri
- Motor Kontrol Kartları
- Yağmur Sensörü
- Isı ve Nem Sensörü
- LDR Işık Sensörü
- Gaz Sensörü
- Bluetooth Bağlantı Modülü
İleride bu sensörlere daha yakından değineceğiz.
Sensörler Nerelerde Kullanılır?
Sensörler ihtiyaca yönelik üretildiklerinden çeşitli ihtiyaçları karşılayabilir. Tıpkı duyu organlarımız gibi; her sensör çevresindeki fiziki koşulları farklı şekillerde algılar, yine çevredeki fiziksel koşullara göre bizlere bir yanıt sağlar.
Örnek vermek gerekirse; mesafe veya sesi algılamak için insanlarda kulak vardır. Kulağımızdaki mekanizmadan ilham alınarak üretilen çeşitli ses sensörleri bulunur, bu sensörler sayesinde de sesli uygulamalar – projeler gerçekleştirebiliriz.
Örneklerimizi genişletelim :
Ultrasonik Sensör Nedir? Nerelerde Kullanılır? Ne İşe Yarar?
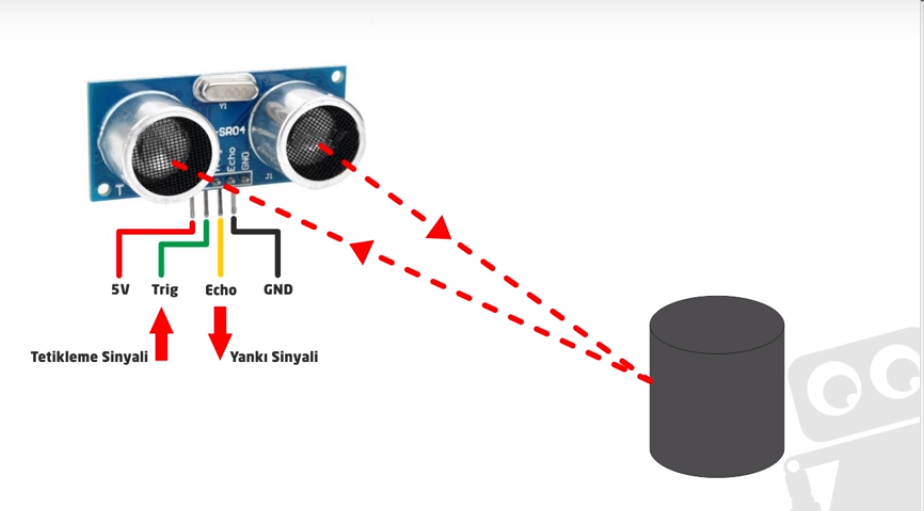
Ultrasonik sensör ismini “ultra” ve “sonic” kelimelerinin birleşmesinden alır. “Daha yüksek ses” anlamına gelmektedir. Bu sensörler mesafe ölçme amaçlı kullanılmaktadırlar.
Çalışma prensipleri ise şu şekildedir: Ultrasonik sensörler dışarıya bir ses dalgası sinyali gönderirler. Gönderdikleri ses dalgasının bir cisme ulaşıp kendisine geri dönmesini beklerler. Sinyalin gönderilip tekrar geri gelme süresi baz alınarak sensörün cisme olan uzaklığı hesaplanır. (x = v * t / Yol = Hız * Zaman)
Arduino ile HC-SR04 Ultrasonik sensör kullanımı yazımızı inceleyebilirsiniz.
Engelden kaçan robot projemizde Ultrasonik sensörlü ürünlerden nasıl faydalandığımızı inceleyebilirsiniz.
Infra-Red (Kızılötesi) Sensör Nedir?
Nerelerde Kullanılır? Ne İşe Yarar?
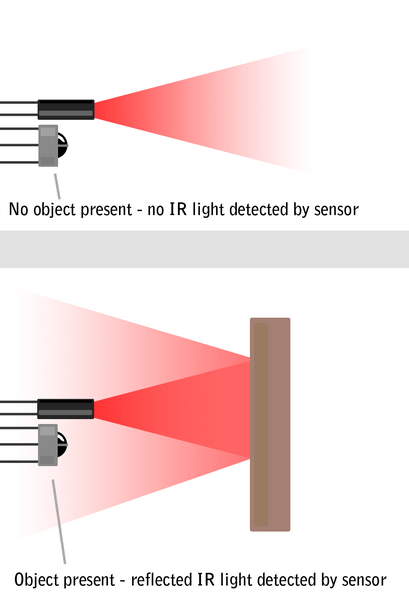
Kızılötesi sensörler mesafe ve karanlık/aydınlık algılama amaçlarıyla kullanılan sensörlerdir.
Kızılötesi sensörlerin yapısında genellikle kızılötesi ışın yayan bir LED ve bu ışının yansımasını kontrol eden bir foto komponent bulunur (fotodiyot, fototransistör gibi).
Sensörün içinde bulunan LED, kontrol etmek istediğimiz bilgi ile aynı dalga boyuna sahip bir ışın üretir. Bu ışının şiddetini kullanıcı kontrol edebilir (Örneğin, 0-80 cm arasında mesafe ölçümü yapabilen bir sensörün kaç cm’ye kadar ölçüm yapması isteniyorsa ona göre ayarlanabilir).
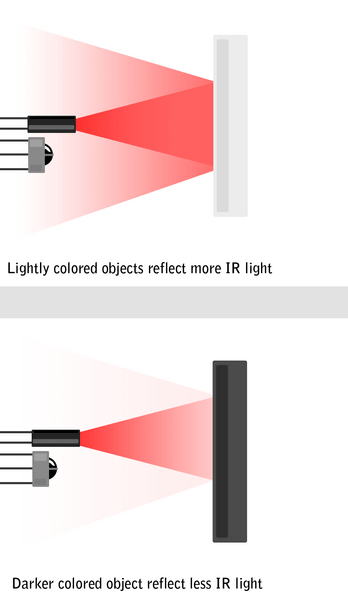
Cismin üzerine düşen ve geri yansıyan kızılötesi ışınları bir foto komponent denetler ve sensör geri dönen ışın sinyaline göre algılama işini gerçekleştirir.
Çizgi İzleyen Robot projemizde kızılötesi sensörden nasıl faydalandığımızı inceleyebilirsiniz.
Kızılötesi haberleşme sayesinde Arduino Uno ile TV kumandası kullanarak şerit LED kontrol ettiğimiz videomuzu inceleyebilirsiniz.
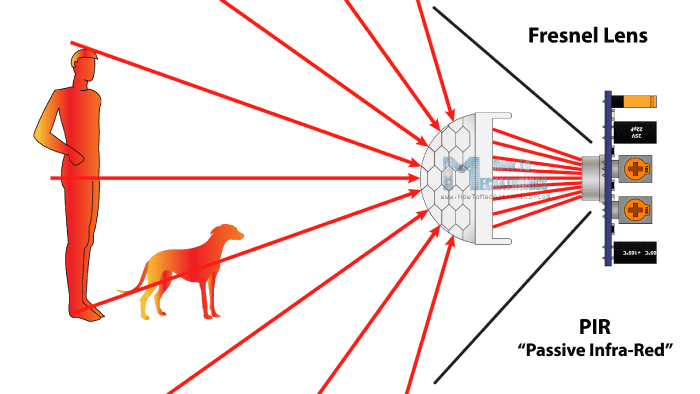
Passive Infra-Red (PIR) Sensörü Nedir?
Nerelerde Kullanılır? Ne İşe Yarar?
PIR sensörleri ortamdaki sıcaklık ve kızılötesi dalga değişimlerine göre hareket algılayan sensörlerdir. Bu yüzden hem kızılötesi hem termal sensör mantığına sahiptir.
Bu sensörler en yaygın olarak alarm sistemlerinde ve otomatik aydınlatmalarda kullanılırlar.
Çalışma prensipleri ise şu şekildedir: Tüm nesneler bulundukları ortama sıcaklık ve kızılötesi dalga yayarlar. PIR sensörlerin yapısında da bir fresnel lens vardır. Bu mercek sayesinde ortamdaki ışınlar sensörün tam üzerine düşüp odaklanmasını sağlar.
Sensör, sabit olan sıcaklık ve kızılötesi dalgalar değiştiğinde bunu algılayarak sisteme bildirir.
Örneğin bir odaya monte edilen PIR sensörü sabit olarak odadaki duvar ve cisimlerin yaydıkları sabit dalga değerlerini kontrol eder. Odaya bir insan girdiğinde bu değerler değişime uğrayacağından sensör algılar ve bağlı olduğu sisteme bilgi verir.
Dilerseniz Raspberry Pi 3 ile PIR sensörünün kullanımı hakkındaki yazımızı inceleyebilirsiniz.
Hall Effect Sensör Nedir?
Nerelerde Kullanılır? Ne İşe Yarar?
Hall effect sensörleri, manyetik alan algılayarak sinyal çıkışı sağlayan sensörlerdir. Bu sensörler mesafe, hız, akım algılamada ve konumlandırmada kullanılırlar.
NTC/PTC Sensörleri Nedir?
Nerelerde Kullanılır? Ne İşe Yarar?
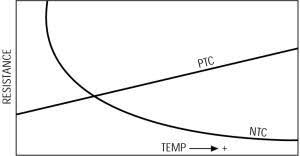
NTC (Negative Temperature Coefficient) ve PTC (Positive Temperature Coefficient) ısıya duyarlı dirençlerdir. Yukarıda da bahsettiğimiz gibi bu sensörler kendileri bir sinyal üretip geri dönüşünü beklemez, doğrudan ortamdan etkilenirler.
NTC, üzerine düşen sıcaklık arttıkça sahip olduğu direnç değeri düşer. Yani algıladığı ısı değeri ile ters orantılıdır. PTC’nin ise üzerine düşen sıcaklık arttıkça sahip olduğu direnç değeri de artar. Yani ısı ile doğru orantılıdır.
Arduino ile NTC kullanarak sıcaklık ölçümü yaptığımız yazıyı inceleyebilirsiniz.
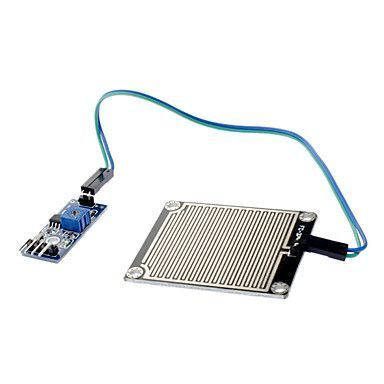
Yağmur Sensörü (Rain Sensor) Nedir?
Nerelerde Kullanılır? Ne İşe Yarar?
Bu tip sensörler su seviyesi ölçümü, su damlası tespiti ve yağmur sensörleri olarak kullanılabilirler. Yağmur sensörleri, üzerlerinde su düştüğünde bağlı olduğu kontrolcüye bilgi sinyali gönderirler. Çeşitlerine ve bağlı oldukları devrelere göre analog ve dijital olarak çıkış sağlayabilirler.
Sitemizde bulunan yağmur sensörlerini buradan inceleyebilirsiniz.
Robot Kontrol Kartları
Kontrol kartı, robotun temel karar mekanizması için gereken en temel bileşendir.
Bu kartlar sayesinde çevredeki sensörlerden bilgiler alınır, işlenir ve motor gibi çıkış birimlerine komut verilir. Temelde bu kontrol kartlarını bir bilgisayar olarak düşünebiliriz. Bu bilgisayar Arduino gibi mikrokontrolcü kartları formunda veya Raspberry Pi tek kart bilgisayarlar şeklinde olabilir.
-
Mikrokontrolcüler:
Mikrokontrolcü kartları (PIC, Arduino, ESP8266, mBed v.b.) ile tek kart bilgisayarların (Raspberry Pi, Orange Pi, BeagleBoard v.b.) en büyük ayrıldıkları nokta şudur: Mikrokontrolcü kartı yalnızca bir programı çalıştırmaları düşünülerek tasarlanırlar.
Ayrıca mikroişlemci ile mikrokontrolcü farklı kavramlardır. Mikroişlemci, mikrokontrolcünün aritmetik ve lojik işlemlerinden sorumlu birimidir. Mikrokontrolcüde işlemci biriminin yanı sıra, RAM bellek, ROM bellek, flaş hafıza, haberleşme birimleri (I2C, SPI, UART v.b.) de yer almaktadır.
Sadece tek bir programı çalıştırmaları öngörüldüğü için RAM ve ROM bellekleri günlük hayatta kullandığımız bilgisayarlarımızdan çok daha az miktardadır (KB’lar mertebesinde). Sensör bilgisi okumak, motor çalıştırmak, haberleşme birimlerini yönetmek gibi işlemler için bu kapasite genellikle fazlasıyla yeterli olacaktır.
-
Tek Kart Bilgisayarlar:
Tek kart bilgisayarlar ise, isimlerinden de bir miktar anlaşılacağı üzere günlük hayatta kullanmakta olduğumuz bilgisayarlar gibi işlev görebilirler. Bu demektir ki, aynı anda birden fazla programı çalıştırabilecek işlemci birimleri, RAM ve kalıcı belleğe, birden fazla giriş ve çıkış birimine sahiptirler.
Daha fazla işlem gücüne sahip olmalarının iyi olduğunu düşünebiliriz, fakat bu bilgisayarlar aynı anda birden çok işi; örneğin web tarayıcı açıkken bir yandan müzik çalmak, bütün bu işlemlerler devam ederken klavye/fare gibi giriş birimlerinden girdi alarak ekran gibi çıktı birimlerini yönetmek gibi yaptıklarından dolayı, bu işlemlerin yanında zaman-kritik uygulamaları yapmakta (örneğin servo motor sürmek) her zaman çok başarılı olamamaktadırlar.
Bunun yanında kamera gibi görüntü birimlerini yönetebilecekleri ve çok daha yüksek işlem kapasitesi sunabildiklerinden dolayı örnek olarak bir görüntü işleme uygulamasında bu kartları tercih etmek daha mantıklı bir hareket olacaktır.
Hangi Kontrol Kartını Tercih Etmeliyim?
Kontrol kartı tercih ederken ilk dikkat etmemiz gereken nokta projemizin karmaşıklık seviyesidir. Eğer komutlarımızı takip edecek veya çizgi izleme/engelden kaçma gibi görevleri yapacak basit bir mobil robot tasarlayacaksak mikrokontrolcüler işimizi görecektir.
Fakat görüntü işleme, yapay zeka gibi işlem gücüne ihtiyaç duyacak görevlerde tercihimizi tek kart bilgisayarlardan yana kullanabiliriz. Bunun yanı sıra, tek kart bilgisayarın yanına bir mikrokontrolcü ekleyerek birbirleriyle haberleşmesini sağlayarak her iki dünyanın da iyi yanlarından faydalanmamız mümkündür 🙂
İşlem gücünün yanı sıra, elbette bir sonraki önceliğimiz kullanacağımız kontrol kartının giriş/çıkış sayısıdır. Kullanacağınız kontrolcünün robot projenizde kullanacağınız giriş/çıkış birimine yetecek kadar miktarda giriş/çıkışa sahip olması gereklidir. Burada bir diğer dikkat etmek gereken nokta, Arduino gibi kartların farklı modellerinde farklı yeteneklere sahip çeşitli sayıda giriş/çıkış sayısına sahip olmalarıdır.
Örneğin, motor sürmede hız kontrolüne ihtiyaç duyacaksanız, kontrolcünüzün motor sayısı kadar PWM çıkışa sahip olması gereklidir.
Kontrol kartı tercih ederken dikkat etmeniz gereken bir diğer nokta ise desteklediği programlama dilleri ve popülaritesidir. Deneyimli kullanıcılar için popülarite çok önemli olmasa da, özellikle yeni başlayacaklar için kartın çeşitli çevre birimleri ile ilgili örnek programlar ve kütüphaneler, yapılmış başka benzer projeler bulunması faydalı olacaktır.
Bunun yanı sıra popüler programlama dillerinden olan C/C++ ve Python destekleyen bir kart tercih etmek, yeni başlayanlar için yine daha iyi olacaktır.
Bu yazımızda sensörlerden ve kontrolcülerden bahsettik. Başka bir yazımızda görüşmek üzere 🙂







Teşekkürler
merhaba . kışın donmamak için aracların farklı kısımlarına sığınan hayvanları sürücünün algılayabileceği bir arduino projesi yapmak istiyorum. yani yakındaki canlının vücut ısısını algılayan. nasıl bir sensör kullanabilirim? teşekkürler şimdiden.
Merhaba bu projeyı yaptınız mı acaba ? Yardımcı olabılır mısınız ?
Motorun sıcaklığı projeyi bozan bir etmen 🙁
Çok yararlı bir yazı olmuş. Teşekkür ederim.
tşk
Ya ben yazarken uyuya kalmışım ama öğretmenim çok beğendi…
Yorum yok
LM35 DHT11 DHT22 sıcaklık sensörleri arasındaki farkları açıklar mısınız
LM35 analog çıkış veriyor DHT11 ve DHT22 dijital çıkış veriyor. LM35’i ADC aralığıyla okuman gerek(Arduino’da analogread)(STM32’de ADC açman gerek). DHT11 ve DHT22 clock sinyali gibi bir çıkış veriyor herhangi bir dijital pin üzerinden okuyabilirsin.
Thank you😀
Hareket algılayıcı sensörü ihtiyacım var. Hareket olmadığında yani nesne 0 hızdayken uyarı veren hareket halinde ise uyarı vermeyen, hareket halinde farklı bir ses verirsede daha iyi olur tabiki.Ama öncelik O hızda nesne durdğunda uyarı veren bir sensör lazım?
Hareket sensörunu al yazılımını yap zaten bir nesneyi hareket ederken görürse bu nesne durduğunda sana uyarı verir
Teşekkürler ederim gerçekten çok faydası oldu🙏
Bilgi edindim teşekkürler
bir hareket sensörü ve arduino kart ile sensörlü kağıt havlu makinaları tarzında bir şey yapabilir miyim? arduino bilgim yok bu arada ama yapmam münkünse çalışmaya başlayacağım. 🙂
Elbette mümkün. Hareketi algılamak için bir HCRS04 sensörü, kağıt rulonuzun dönmesini sağlamak için de bir DC motoru kullanabilirsiniz. Yani benim aklıma ilk gelenler bunlar 🙂 Proje tamamen sizin hayal gücünüzle sınırlıdır..
Donma seviyesine gelince otomatik ısıtma yapan kıyafet yapmak mümkünmü bu sensörler ile?
Tabii 🙂
bir projem için şunu merak ediyorum. Bir sensör bir maddenin neyden yapıldığını tespit edebilir mi ? Mesela maddenin cam, kağıt, plastik gibi maddelerden hanisi olcuduğunu belirleyecek. Yazı için de teşekkürler, iyi günler :))
Bunu kamera ile anlayabilirsiniz. Bunun için de Raspberry Pi kullanabilirsiniz.
merhaba engebeleri ve derinlikleri algılamak için hangi sensörü kullanmalıyım yardımcı olur musunuz?
Selamlar.
LIDAR sensörünü araştırabilirsiniz.